
Simulation Manual
OMNeT++ version 6.2.0
Chapters
1 Introduction
2 Overview
3 The NED Language
4 Simple Modules
5 Messages and Packets
6 Message Definitions
7 The Simulation Library
8 Graphics and Visualization
9 Building Simulation Programs
10 Configuring Simulations
11 Running Simulations
12 Result Recording and Analysis
13 Eventlog
14 Documenting NED and Messages
15 Testing
16 Parallel Distributed Simulation
17 Customizing and Extending OMNeT++
18 Embedding the Simulation Kernel
19 Appendix A: NED Reference
20 Appendix B: NED Language Grammar
21 Appendix C: NED XML Binding
22 Appendix D: NED Functions
23 Appendix E: Message Definitions Grammar
24 Appendix F: Message Class/Field Properties
25 Appendix G: Display String Tags
26 Appendix H: Figure Definitions
27 Appendix I: Configuration Options
28 Appendix J: Result File Formats
29 Appendix K: Eventlog File Format
30 Appendix L: Python API for Chart Scripts
Table of Contents
1 Introduction
1.1 What Is OMNeT++?
1.2 Organization of This Manual
2 Overview
2.1 Modeling Concepts
2.1.1 Hierarchical Modules
2.1.2 Module Types
2.1.3 Messages, Gates, Links
2.1.4 Modeling of Packet Transmissions
2.1.5 Parameters
2.1.6 Topology Description Method
2.2 Programming the Algorithms
2.3 Using OMNeT++
2.3.1 Building and Running Simulations
2.3.2 What Is in the Distribution
3 The NED Language
3.1 NED Overview
3.2 NED Quickstart
3.2.1 The Network
3.2.2 Introducing a Channel
3.2.3 The App, Routing, and Queue Simple Modules
3.2.4 The Node Compound Module
3.2.5 Putting It Together
3.3 Simple Modules
3.4 Compound Modules
3.5 Channels
3.6 Parameters
3.6.1 Assigning a Value
3.6.2 Expressions
3.6.3 Parameter References
3.6.4 Volatile Parameters
3.6.5 Mutable Parameters
3.6.6 Units
3.6.7 XML Parameters
3.6.8 Object Parameters and Structured Data
3.6.9 Passing a Formula as Parameter
3.7 Gates
3.8 Submodules
3.9 Connections
3.9.1 Channel Specification
3.9.2 Reconnecting Gates
3.9.3 Channel Names
3.10 Multiple Connections
3.10.1 Examples
3.10.2 Connection Patterns
3.11 Parametric Submodule and Connection Types
3.11.1 Parametric Submodule Types
3.11.2 Conditional Parametric Submodules
3.11.3 Parametric Connection Types
3.12 Metadata Annotations (Properties)
3.12.1 Property Indices
3.12.2 Data Model
3.12.3 Overriding and Extending Property Values
3.12.4 Known Properties
3.13 Inheritance
3.14 Packages
3.14.1 Overview
3.14.2 Name Resolution, Imports
3.14.3 Name Resolution With "like"
3.14.4 The Default Package
4 Simple Modules
4.1 Simulation Concepts
4.1.1 Discrete Event Simulation
4.1.2 The Event Loop
4.1.3 Events and Event Execution Order in OMNeT++
4.1.4 Simulation Time
4.1.5 FES Implementation
4.2 Components, Simple Modules, Channels
4.3 Defining Simple Module Types
4.3.1 Overview
4.3.2 Constructor
4.3.3 Initialization and Finalization
4.4 Adding Functionality to cSimpleModule
4.4.1 handleMessage()
4.4.2 activity()
4.4.3 Use Modules Instead of Global Variables
4.4.4 Reusing Module Code via Subclassing
4.5 Accessing Module Parameters
4.5.1 Reading the Value
4.5.2 Volatile versus Non-Volatile Parameters
4.5.3 Object Parameters
4.5.4 JSON-Style Parameters
4.5.5 Changing a Parameter's Value
4.5.6 Further cPar Methods
4.5.7 Reacting to Parameter Changes
4.6 Accessing Gates and Connections
4.6.1 Gate Objects
4.6.2 Connections
4.6.3 The Connection's Channel
4.7 Sending and Receiving Messages
4.7.1 Self-Messages
4.7.2 Sending Messages
4.7.3 Broadcasts and Retransmissions
4.7.4 Delayed Sending
4.7.5 Direct Message Sending
4.7.6 Packet Transmissions
4.7.7 Transmission Updates
4.7.8 Receiving Packets
4.7.9 Receiving Messages with activity()
4.8 Channels
4.8.1 Overview
4.8.2 The Channel API
4.8.3 Channel Examples
4.9 Stopping the Simulation
4.9.1 Normal Termination
4.9.2 Raising Errors
4.10 Finite State Machines
4.10.1 Overview
4.11 Navigating the Module Hierarchy
4.11.1 Module Vectors
4.11.2 Component IDs
4.11.3 Walking Up and Down the Module Hierarchy
4.11.4 Finding Modules by Path
4.11.5 Iterating over Submodules
4.11.6 Navigating Connections
4.12 Direct Method Calls Between Modules
4.13 Dynamic Module Creation
4.13.1 When To Use
4.13.2 Overview
4.13.3 Creating Modules
4.13.4 Deleting Modules
4.13.5 The preDelete() method
4.13.6 Component Weak Pointers
4.13.7 Module Deletion and finish()
4.13.8 Creating Connections
4.13.9 Removing Connections
4.14 Signals
4.14.1 Design Considerations and Rationale
4.14.2 The Signals Mechanism
4.14.3 Listening to Model Changes
4.15 Signal-Based Statistics Recording
4.15.1 Motivation
4.15.2 Declaring Statistics
4.15.3 Demultiplexing Results with the Demux Filter
4.15.4 Statistics Recording for Dynamically Registered Signals
4.15.5 Adding Result Filters and Recorders Programmatically
4.15.6 Emitting Signals
4.15.7 Writing Result Filters and Recorders
5 Messages and Packets
5.1 Overview
5.2 The cMessage Class
5.2.1 Basic Usage
5.2.2 Duplicating Messages
5.2.3 Message IDs
5.2.4 Control Info
5.2.5 Information About the Last Arrival
5.2.6 Display String
5.3 Self-Messages
5.3.1 Using a Message as Self-Message
5.3.2 Context Pointer
5.4 The cPacket Class
5.4.1 Basic Usage
5.4.2 Identifying the Protocol
5.4.3 Information About the Last Transmission
5.4.4 Encapsulating Packets
5.4.5 Reference Counting
5.4.6 Encapsulating Several Packets
5.5 Attaching Objects To a Message
5.5.1 Attaching Objects
5.5.2 Attaching Parameters
6 Message Definitions
6.1 Introduction
6.1.1 The First Message Class
6.1.2 Ingredients of Message Files
6.2 Classes, Messages, Packets, Structs
6.2.1 Classes, Messages, Packets
6.2.2 Structs
6.3 Enums
6.4 Imports
6.5 Namespaces
6.6 Properties
6.6.1 Data Types
6.7 Fields
6.7.1 Scalar fields
6.7.2 Initial Values
6.7.3 Overriding Initial Values from Subclasses
6.7.4 Const Fields
6.7.5 Abstract Fields
6.7.6 Fixed-Size Arrays
6.7.7 Variable-Size Arrays
6.7.8 Classes and Structs as Fields
6.7.9 Non-Owning Pointer Fields
6.7.10 Owning Pointer Fields
6.8 Literal C++ Blocks
6.9 Using External C++ Types
6.10 Customizing the Generated Class
6.10.1 Customizing Method Names
6.10.2 Injecting Code into Methods
6.10.3 Generating str()
6.10.4 Custom-implementation Methods
6.10.5 Custom Fields
6.10.6 Customizing the Class via Inheritance
6.10.7 Using an Abstract Field
6.11 Descriptor Classes
6.11.1 cClassDescriptor
6.11.2 Controlling Descriptor Generation
6.11.3 Generating Descriptors For Existing Classes
6.11.4 Field Metadata
6.11.5 Method Name Properties
6.11.6 toString/fromString
6.11.7 toValue/fromValue
6.11.8 Field Modifiers
7 The Simulation Library
7.1 Fundamentals
7.1.1 Using the Library
7.1.2 The cObject Base Class
7.1.3 Iterators
7.1.4 Runtime Errors
7.2 Logging from Modules
7.2.1 Log Output
7.2.2 Log Levels
7.2.3 Log Statements
7.2.4 Log Categories
7.2.5 Composition and New Lines
7.2.6 Implementation
7.3 Random Number Generators
7.3.1 RNG Implementations
7.3.2 Global and Component-Local RNGs
7.3.3 Accessing the RNGs
7.4 Generating Random Variates
7.4.1 Component Methods
7.4.2 Random Number Stream Classes
7.4.3 Generator Functions
7.4.4 Random Numbers from Histograms
7.4.5 Adding New Distributions
7.5 Container Classes
7.5.1 Queue class: cQueue
7.5.2 Expandable Array: cArray
7.6 Routing Support: cTopology
7.6.1 Overview
7.6.2 Basic Usage
7.6.3 Shortest Paths
7.6.4 Manipulating the graph
7.7 Pattern Matching
7.7.1 cPatternMatcher
7.7.2 cMatchExpression
7.8 Dynamic Expression Evaluation
7.9 Collecting Summary Statistics and Histograms
7.9.1 cStdDev
7.9.2 cHistogram
7.9.3 cPSquare
7.9.4 cKSplit
7.10 Recording Simulation Results
7.10.1 Output Vectors: cOutVector
7.10.2 Output Scalars
7.11 Watches and Snapshots
7.11.1 Basic Watches
7.11.2 Read-write Watches
7.11.3 Structured Watches
7.11.4 STL Watches
7.11.5 Watching Expressions
7.11.6 Snapshots
7.11.7 Getting Coroutine Stack Usage
7.12 Defining New NED Functions
7.12.1 Define_NED_Function()
7.12.2 Define_NED_Math_Function()
7.13 Deriving New Classes
7.13.1 cObject or Not?
7.13.2 cObject Virtual Methods
7.13.3 Class Registration
7.13.4 Details
7.14 Object Ownership Management
7.14.1 The Ownership Tree
7.14.2 Managing Ownership
8 Graphics and Visualization
8.1 Overview
8.2 Placement of Visualization Code
8.2.1 The refreshDisplay() Method
8.2.2 Advantages
8.2.3 Why is refreshDisplay() const?
8.3 Smooth Animation
8.3.1 Concepts
8.3.2 Smooth vs. Traditional Animation
8.3.3 The Choice of Animation Speed
8.3.4 Holds
8.3.5 Disabling Built-In Animations
8.4 Display Strings
8.4.1 Syntax and Placement
8.4.2 Inheritance
8.4.3 Submodule Tags
8.4.4 Background Tags
8.4.5 Connection Display Strings
8.4.6 Message Display Strings
8.4.7 Parameter Substitution
8.4.8 Embedded Expressions
8.4.9 Colors
8.4.10 Icons
8.4.11 Layouting
8.4.12 Changing Display Strings at Runtime
8.5 Bubbles
8.6 The Canvas
8.6.1 Overview
8.6.2 Creating, Accessing, and Viewing Canvases
8.6.3 Figure Classes
8.6.4 The Figure Tree
8.6.5 Creating and Manipulating Figures from NED and C++
8.6.6 Stacking Order
8.6.7 Transforms
8.6.8 Showing/Hiding Figures
8.6.9 Figure Tooltip, Associated Object
8.6.10 Specifying Positions, Colors, Fonts and Other Properties
8.6.11 Primitive Figures
8.6.12 Compound Figures
8.6.13 Self-Refreshing Figures
8.6.14 Figures with Custom Renderers
8.7 3D Visualization
8.7.1 Introduction
8.7.2 The OMNeT++ API for OpenSceneGraph
8.7.3 Using OSG
8.7.4 Using osgEarth
8.7.5 OpenSceneGraph/osgEarth Programming Resources
9 Building Simulation Programs
9.1 Overview
9.2 Using opp_makemake and Makefiles
9.2.1 Command-line Options
9.2.2 Basic Use
9.2.3 Debug and Release Builds
9.2.4 Debugging the Makefile
9.2.5 Using External C/C++ Libraries
9.2.6 Building Directory Trees
9.2.7 Dependency Handling
9.2.8 Out-of-Directory Build
9.2.9 Building Shared and Static Libraries
9.2.10 Recursive Builds
9.2.11 Customizing the Makefile
9.2.12 Projects with Multiple Source Trees
9.2.13 A Multi-Directory Example
9.3 Project Features
9.3.1 What is a Project Feature
9.3.2 The opp_featuretool Program
9.3.3 The .oppfeatures File
9.3.4 How to Introduce a Project Feature
10 Configuring Simulations
10.1 The Configuration File
10.1.1 An Example
10.1.2 File Syntax
10.1.3 File Inclusion
10.2 Sections
10.2.1 The [General] Section
10.2.2 Named Configurations
10.2.3 Section Inheritance
10.3 Assigning Module Parameters
10.3.1 Using Wildcard Patterns
10.3.2 Using the Default Values
10.4 Parameter Studies
10.4.1 Iterations
10.4.2 Named Iteration Variables
10.4.3 Parallel Iteration
10.4.4 Predefined Variables, Run ID
10.4.5 Constraint Expression
10.4.6 Repeating Runs with Different Seeds
10.4.7 Experiment-Measurement-Replication
10.5 Configuring the Random Number Generators
10.5.1 Number of RNGs
10.5.2 RNG Choice
10.5.3 RNG Mapping
10.5.4 Automatic Seed Selection
10.5.5 Manual Seed Configuration
10.6 Logging
10.6.1 Compile-Time Filtering
10.6.2 Runtime Filtering
10.6.3 Log Prefix Format
10.6.4 Configuring Logging in Cmdenv
10.6.5 Configuring Logging in Qtenv
11 Running Simulations
11.1 Introduction
11.2 Simulation Executables vs Libraries
11.3 Command-Line Options
11.4 Configuration Options on the Command Line
11.5 Specifying Ini Files
11.6 Specifying the NED Path
11.7 Selecting a User Interface
11.8 Selecting Configurations and Runs
11.8.1 Run Filter Syntax
11.8.2 The Query Option
11.9 Loading Extra Libraries
11.10 Stopping Condition
11.11 Controlling the Output
11.12 Debugging
11.13 Debugging Leaked Messages
11.14 Debugging Other Memory Problems
11.15 Profiling
11.16 Checkpointing
11.17 Using Cmdenv
11.17.1 Sample Output
11.17.2 Selecting Runs, Batch Operation
11.17.3 Express Mode
11.17.4 Other Options
11.18 The Qtenv Graphical User Interface
11.18.1 Command-Line and Configuration Options
11.19 Running Simulation Campaigns
11.19.1 The Naive Approach
11.19.2 Using opp_runall
11.19.3 Exploiting Clusters
11.20 Akaroa Support: Multiple Replications in Parallel
11.20.1 Introduction
11.20.2 What Is Akaroa
11.20.3 Using Akaroa with OMNeT++
12 Result Recording and Analysis
12.1 Result Recording
12.1.1 Using Signals and Declared Statistics
12.1.2 Direct Result Recording
12.2 Configuring Result Collection
12.2.1 Result File Names
12.2.2 Enabling/Disabling Result Items
12.2.3 Selecting Recording Modes for Signal-Based Statistics
12.2.4 Warm-up Period
12.2.5 Output Vectors Recording Intervals
12.2.6 Recording Event Numbers in Output Vectors
12.2.7 Saving Parameters as Scalars
12.2.8 Recording Precision
12.3 Result Files
12.3.1 The OMNeT++ Result File Format
12.3.2 SQLite Result Files
12.3.3 Scavetool
12.4 Result Analysis
12.4.1 Python Packages
12.4.2 An Example Chart Script
12.5 Alternatives
13 Eventlog
13.1 Introduction
13.2 Configuration
13.2.1 File Name
13.2.2 Recording Intervals
13.2.3 Recording Modules
13.2.4 Recording Message Data
13.3 Eventlog Tool
13.3.1 Filter
13.3.2 Echo
14 Documenting NED and Messages
14.1 Overview
14.2 Documentation Comments
14.2.1 Private Comments
14.2.2 More on Comment Placement
14.3 Referring to Other NED and Message Types
14.3.1 Automatic Linking
14.3.2 Tilde Linking
14.4 Text Layout and Formatting
14.4.1 Paragraphs and Lists
14.4.2 Special Tags
14.4.3 Text Formatting Using HTML
14.4.4 Escaping HTML Tags
14.5 Incorporating Extra Content
14.5.1 Adding a Custom Title Page
14.5.2 Adding Extra Pages
14.5.3 Incorporating Externally Created Pages
14.5.4 File Inclusion
14.5.5 Extending Type Pages with Extra Content
15 Testing
15.1 Overview
15.1.1 Verification, Validation
15.1.2 Unit Testing, Regression Testing
15.2 The opp_test Tool
15.2.1 Introduction
15.2.2 Terminology
15.2.3 Test File Syntax
15.2.4 Test Description
15.2.5 Test Code Generation
15.2.6 PASS Criteria
15.2.7 Extra Processing Steps
15.2.8 Error
15.2.9 Expected Failure
15.2.10 Skipped
15.2.11 opp_test Synopsis
15.2.12 Writing the Control Script
15.3 Smoke Tests
15.4 Fingerprint Tests
15.4.1 Fingerprint Computation
15.4.2 Fingerprint Tests
15.5 Unit Tests
15.6 Module Tests
15.7 Statistical Tests
15.7.1 Validation Tests
15.7.2 Statistical Regression Tests
15.7.3 Implementation
16 Parallel Distributed Simulation
16.1 Introduction to Parallel Discrete Event Simulation
16.2 Assessing Available Parallelism in a Simulation Model
16.3 Parallel Distributed Simulation Support in OMNeT++
16.3.1 Overview
16.3.2 Parallel Simulation Example
16.3.3 Placeholder Modules, Proxy Gates
16.3.4 Configuration
16.3.5 Design of PDES Support in OMNeT++
17 Customizing and Extending OMNeT++
17.1 Overview
17.2 Adding a New Configuration Option
17.2.1 Registration
17.2.2 Reading the Value
17.3 Simulation Lifecycle Listeners
17.4 cEvent
17.5 Defining a New Random Number Generator
17.6 Defining a New Event Scheduler
17.7 Defining a New FES Data Structure
17.8 Defining a New Fingerprint Algorithm
17.9 Defining a New Output Scalar Manager
17.10 Defining a New Output Vector Manager
17.11 Defining a New Eventlog Manager
17.12 Defining a New Snapshot Manager
17.13 Defining a New Configuration Provider
17.13.1 Overview
17.13.2 The Startup Sequence
17.13.3 Providing a Custom Configuration Class
17.13.4 Providing a Custom Reader for SectionBasedConfiguration
17.14 Implementing a New User Interface
18 Embedding the Simulation Kernel
18.1 Architecture
18.2 Embedding the OMNeT++ Simulation Kernel
18.2.1 The main() Function
18.2.2 The simulate() Function
18.2.3 Providing an Environment Object
18.2.4 Providing a Configuration Object
18.2.5 Loading NED Files
18.2.6 How to Eliminate NED Files
18.2.7 Assigning Module Parameters
18.2.8 Extracting Statistics from the Model
18.2.9 The Simulation Loop
18.2.10 Multiple, Coexisting Simulations
18.2.11 Installing a Custom Scheduler
18.2.12 Multi-Threaded Programs
19 Appendix A: NED Reference
19.1 Syntax
19.1.1 NED File Name Extension
19.1.2 NED File Encoding
19.1.3 Reserved Words
19.1.4 Identifiers
19.1.5 Case Sensitivity
19.1.6 Literals
19.1.7 Comments
19.1.8 Grammar
19.2 Built-in Definitions
19.3 Packages
19.3.1 Package Declaration
19.3.2 Directory Structure, package.ned
19.4 Components
19.4.1 Simple Modules
19.4.2 Compound Modules
19.4.3 Networks
19.4.4 Channels
19.4.5 Module Interfaces
19.4.6 Channel Interfaces
19.4.7 Resolving the C++ Implementation Class
19.4.8 Properties
19.4.9 Parameters
19.4.10 Pattern Assignments
19.4.11 Gates
19.4.12 Submodules
19.4.13 Connections
19.4.14 Conditional and Loop Connections, Connection Groups
19.4.15 Inner Types
19.4.16 Name Uniqueness
19.4.17 Parameter Assignment Order
19.4.18 Type Name Resolution
19.4.19 Resolution of Parametric Types
19.4.20 Implementing an Interface
19.4.21 Inheritance
19.4.22 Network Build Order
19.5 Expressions
19.5.1 Constants
19.5.2 Array and Object Values
19.5.3 Operators
19.5.4 Referencing Parameters and Loop Variables
19.5.5 The typename Operator
19.5.6 The index Operator
19.5.7 The exists() Operator
19.5.8 The sizeof() Operator
19.5.9 The expr() Operator
19.5.10 Functions
19.5.11 Units of Measurement
20 Appendix B: NED Language Grammar
21 Appendix C: NED XML Binding
22 Appendix D: NED Functions
22.1 Category "conversion":
22.2 Category "i/o":
22.3 Category "math":
22.4 Category "misc":
22.5 Category "ned":
22.6 Category "random/continuous":
22.7 Category "random/discrete":
22.8 Category "strings":
22.9 Category "units":
22.10 Category "xml":
22.11 Category "units/conversion":
23 Appendix E: Message Definitions Grammar
24 Appendix F: Message Class/Field Properties
25 Appendix G: Display String Tags
25.1 Module and Connection Display String Tags
25.2 Message Display String Tags
26 Appendix H: Figure Definitions
26.1 Built-in Figure Types
26.2 Attribute Types
26.3 Figure Attributes
27 Appendix I: Configuration Options
27.1 Configuration Options
27.2 Predefined Variables
28 Appendix J: Result File Formats
28.1 Native Result Files
28.1.1 Version
28.1.2 Run Declaration
28.1.3 Attributes
28.1.4 Iteration Variables
28.1.5 Configuration Entries
28.1.6 Scalar Data
28.1.7 Vector Declaration
28.1.8 Vector Data
28.1.9 Index Header
28.1.10 Index Data
28.1.11 Statistics Object
28.1.12 Field
28.1.13 Histogram Bin
28.2 SQLite Result Files
29 Appendix K: Eventlog File Format
29.1 Supported Entry Types and Their Attributes
30 Appendix L: Python API for Chart Scripts
30.1 Modules
30.1.1 Module omnetpp.scave.results
30.1.2 Module omnetpp.scave.chart
30.1.3 Module omnetpp.scave.ideplot
30.1.4 Module omnetpp.scave.utils
30.1.5 Module omnetpp.scave.vectorops
30.1.6 Module omnetpp.scave.analysis
30.1.7 Module omnetpp.scave.charttemplate
1 Introduction¶
1.1 What Is OMNeT++?¶
OMNeT++ is an object-oriented modular discrete event network simulation framework. It has a generic architecture, so it can be (and has been) used in various problem domains:
- Modeling of wired and wireless communication networks.
- Protocol modeling.
- Modeling of queueing networks.
- Modeling of multiprocessors and other distributed hardware systems.
- Validation of hardware architectures.
- Evaluating performance aspects of complex software systems.
- In general, modeling and simulation of any system where the discrete event approach is suitable, and can be conveniently mapped into entities communicating by exchanging messages.
OMNeT++ itself is not a simulator of anything concrete, but rather provides infrastructure and tools for writing simulations. One of the fundamental ingredients of this infrastructure is a component architecture for simulation models. Models are assembled from reusable components termed modules. Well-written modules are truly reusable and can be combined in various ways, like LEGO blocks.
Modules can be connected with each other via gates (other systems would call them ports) and combined to form compound modules. The depth of module nesting is not limited. Modules communicate through message passing, where messages may carry arbitrary data structures. Modules can pass messages along predefined paths via gates and connections or directly to their destination. The latter is useful for wireless simulations, for example. Modules may have parameters that can be used to customize module behavior and/or to parameterize the model's topology. Modules at the lowest level of the module hierarchy are called simple modules and encapsulate model behavior. Simple modules are programmed in C++ and make use of the simulation library.
OMNeT++ simulations can be run under various user interfaces. Graphical, animating user interfaces are highly useful for demonstration and debugging purposes, and command-line user interfaces are best for batch execution.
The simulator as well as user interfaces and tools are highly portable. They are tested on the most common operating systems (Linux, macOS, Windows) and they can be compiled out of the box or after trivial modifications on most Unix-like operating systems.
OMNeT++ also supports parallel distributed simulation. OMNeT++ can use several mechanisms for communication between partitions of a parallel distributed simulation, for example, MPI or named pipes. The parallel simulation algorithm can easily be extended, or new ones can be plugged in. Models do not need any special instrumentation to be run in parallel -- it is just a matter of configuration. OMNeT++ can even be used for classroom presentation of parallel simulation algorithms because simulations can be run in parallel even under the GUI that provides detailed feedback on what is going on.
OMNEST is the commercially supported version of OMNeT++. OMNeT++ is free only for academic and non-profit use; for commercial purposes, one needs to obtain OMNEST licenses from Simulcraft Inc.
1.2 Organization of This Manual¶
The manual is organized as follows:
- Chapters [1] and [2] contain introductory material.
- The second group of chapters, [3], [4], and [7], are the programming guide. They present the NED language, describe the simulation concepts and their implementation in OMNeT++, explain how to write simple modules, and describe the class library.
- Chapters [8] and [14] explain how to customize the network graphics and how to write NED source code comments from which documentation can be generated.
- Chapters [9], [10], [11], and deal with practical issues like building and running simulations and analyzing results, and describe the tools OMNeT++ provides to support these tasks.
- Chapter [16] is devoted to the support of distributed execution.
- Chapters [17] and [18] explain the architecture and internals of OMNeT++, as well as ways to extend it and embed it into larger applications.
- The appendices provide a reference on the NED language, configuration options, file formats, and other details.
2 Overview¶
2.1 Modeling Concepts¶
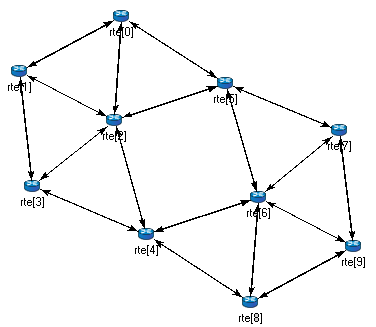
An OMNeT++ model consists of modules that communicate through message passing. The active modules are called simple modules; they are written in C++, using the simulation class library. Simple modules can be grouped into compound modules and so on; there is no limit to the number of hierarchy levels. The entire model, referred to as a network in OMNeT++, is itself a compound module. Messages can be sent either via connections that span modules or directly to other modules.
In Fig. below, boxes represent simple modules (with gray background) and compound modules. Arrows connecting the small boxes represent connections and gates.

Modules communicate with messages that can contain arbitrary data, in addition to the usual attributes such as a timestamp. Simple modules typically send messages through gates, but it is also possible to send them directly to their destination modules. Gates are the input and output interfaces of modules: messages are sent through output gates and arrive through input gates. An input gate and output gate can be linked by a connection. Connections are created within a single level of module hierarchy; within a compound module, the gates of two submodules, or a gate of one submodule and a gate of the compound module can be connected. Connections spanning hierarchy levels are not permitted, as they would hinder model reuse. Because of the hierarchical structure of the model, messages typically travel through a chain of connections, starting and arriving in simple modules. Compound modules act like "cardboard boxes" in the model, transparently relaying messages between their inner realm and the outside world. Parameters such as propagation delay, data rate, and bit error rate can be assigned to connections. One can also define connection types with specific properties (referred to as channels) and reuse them in several places. Modules can have parameters. Parameters are used mainly to pass configuration data to simple modules, and to help define the model's topology. Parameters can hold string, numeric, or boolean values. Because parameters are represented as objects in the program, parameters -- in addition to holding constants -- may also act as sources of random numbers, with the actual distributions provided by the model configuration. They may interactively prompt the user for a value, and they may also hold expressions referencing other parameters. Compound modules may pass parameters or expressions of parameters to their submodules.
OMNeT++ provides efficient tools for the user to describe the structure of the actual system. Some of the main features are as follows:
- hierarchically nested modules
- modules are instances of module types
- modules communicate with messages through channels
- flexible module parameters
- topology description language
2.1.1 Hierarchical Modules¶
An OMNeT++ model consists of hierarchically nested modules that communicate by passing messages to each other. OMNeT++ models are often referred to as networks. The top level module is the system module. The system module contains submodules that can also contain submodules themselves (Fig. below). The depth of module nesting is unlimited, allowing the user to reflect the logical structure of the actual system in the model structure.
The model structure is described in OMNeT++'s NED language.
Modules that contain submodules are called compound modules, as opposed to simple modules at the lowest level of the module hierarchy. Simple modules contain the algorithms of the model. The user implements the simple modules in C++, using the OMNeT++ simulation class library.
2.1.2 Module Types¶
Both simple and compound modules are instances of module types. In describing the model, the user defines module types; instances of these module types serve as components for more complex module types. Finally, the user creates the system module as an instance of a previously defined module type; all modules in the network are instantiated as submodules and sub-submodules of the system module.
When a module type is used as a building block, it makes no difference whether it is a simple or compound module. This allows the user to split a simple module into several simple modules embedded in a compound module, or vice versa, to aggregate the functionality of a compound module into a single simple module, without affecting existing users of the module type.
Module types can be stored in files separate from the location of their actual usage. This means that the user can group existing module types and create component libraries. This feature will be discussed later, in chapter [11].
2.1.3 Messages, Gates, Links¶
Modules communicate by exchanging messages. In an actual simulation, messages can represent frames or packets in a computer network, jobs or customers in a queuing network, or other types of mobile entities. Messages can contain arbitrarily complex data structures. Simple modules can send messages either directly to their destination or along a predefined path, through gates and connections.
The “local simulation time” of a module advances when the module receives a message. The message can arrive from another module or from the same module (self-messages are used to implement timers).
Gates are the input and output interfaces of modules; messages are sent out through output gates and arrive through input gates.
Each connection (also called link) is created within a single level of the module hierarchy: within a compound module, you can connect the corresponding gates of two submodules, or a gate of one submodule and a gate of the compound module (Fig. below).
Because of the hierarchical structure of the model, messages typically travel through a series of connections, starting and arriving in simple modules. Compound modules act like “cardboard boxes” in the model, transparently relaying messages between their inner realm and the outside world.
2.1.4 Modeling of Packet Transmissions¶
To facilitate the modeling of communication networks, connections can be used to model physical links. Connections support the following parameters: data rate, propagation delay, bit error rate, and packet error rate, and may be disabled. These parameters and the underlying algorithms are encapsulated into channel objects. The user can parameterize the channel types provided by OMNeT++, and also create new ones.
When data rates are used, a packet object is by default delivered to the target module at the simulation time that corresponds to the end of the packet reception. Since this behavior is not suitable for the modeling of some protocols (e.g. half-duplex Ethernet), OMNeT++ provides the possibility for the target module to specify that it wants the packet object to be delivered to it when the packet reception starts.
2.1.5 Parameters¶
Modules can have parameters. Parameters can be assigned in either the NED files or the configuration file omnetpp.ini.
Parameters can be used to customize simple module behavior and to parameterize the model's topology.
Parameters can hold string, numeric, or boolean values or can contain XML data trees. Numeric values include expressions using other parameters and calling C functions, random variables from different distributions, and values input interactively by the user.
Numeric-valued parameters can be used to construct topologies in a flexible way. Within a compound module, parameters can define the number of submodules, number of gates, and the way the internal connections are made.
2.1.6 Topology Description Method¶
The user defines the structure of the model in NED language descriptions (Network Description). The NED language will be discussed in detail in chapter [3].
2.2 Programming the Algorithms¶
The simple modules of a model contain algorithms implemented as C++ functions. The full flexibility and power of the programming language can be utilized, supported by the OMNeT++ simulation class library. The simulation programmer can choose between event-driven and process-style descriptions and freely use object-oriented concepts (inheritance, polymorphism, etc.) and design patterns to extend the functionality of the simulator.
Simulation objects (messages, modules, queues, etc.) are represented by C++ classes. They have been designed to work together efficiently, creating a powerful simulation programming framework. The following classes are part of the simulation class library:
- module, gate, parameter, channel
- message, packet
- container classes (e.g. queue, array)
- data collection classes
- statistic and distribution estimation classes (histograms, P2 algorithm for calculating quantiles, etc.)
The classes are also specially instrumented, allowing one to traverse objects of a running simulation and display information about them such as name, class name, state variables, or contents. This feature makes it possible to create a simulation GUI where all internals of the simulation are visible.
2.3 Using OMNeT++¶
2.3.1 Building and Running Simulations¶
This section provides insights into working with OMNeT++ in practice. Issues such as model files and compiling and running simulations are discussed.
An OMNeT++ model consists of the following parts:
- NED language topology description(s) (.ned files) that describe the module structure with parameters, gates, etc. NED files can be written using any text editor, but the OMNeT++ IDE provides excellent support for two-way graphical and text editing.
- Message definitions (.msg files) that let one define message types and add data fields to them. OMNeT++ will translate message definitions into full-fledged C++ classes.
- Simple module sources. They are C++ files, with .h/.cc suffix.
The simulation system provides the following components:
- Simulation kernel. This contains the code that manages the simulation and the simulation class library. It is written in C++, compiled into a shared or static library.
- User interfaces. OMNeT++ user interfaces are used in simulation execution, to facilitate debugging, demonstration, or batch execution of simulations. They are written in C++, compiled into libraries.
Simulation programs are built from the above components. First, .msg files are translated into C++ code using the opp_msgc. program. Then all C++ sources are compiled and linked with the simulation kernel and a user interface library to form a simulation executable or shared library. NED files are loaded dynamically in their original text forms when the simulation program starts.
2.3.1.1 Running the Simulation and Analyzing the Results¶
The simulation may be compiled as a standalone program executable, or as a shared library to be run using OMNeT++'s opp_run utility. When the program is started, it first reads the NED files, then the configuration file usually called omnetpp.ini. The configuration file contains settings that control how the simulation is executed, values for model parameters, etc. The configuration file can also prescribe several simulation runs; in the simplest case, they will be executed by the simulation program one after another.
The output of the simulation is written into result files: output vector files, output scalar files, and possibly the user's own output files. OMNeT++ contains an Integrated Development Environment (IDE) that provides a rich environment for analyzing these files. Output files are line-oriented text files which makes it possible to process them with a variety of tools and programming languages as well, including Matlab, GNU R, Perl, Python, and spreadsheet programs.
2.3.1.2 User Interfaces¶
The primary purpose of user interfaces is to make the internals of the model visible to the user, to control the simulation execution, and possibly allow the user to intervene by changing variables/objects inside the model. This is very important in the development/debugging phase of the simulation project. Equally important, a hands-on experience allows the user to get a feel of the model's behavior. The graphical user interface can also be used to demonstrate a model's operation.
The same simulation model can be executed with various user interfaces, with no change in the model files themselves. The user would typically test and debug the simulation with a powerful graphical user interface, and finally run it with a simple, fast user interface that supports batch execution.
2.3.1.3 Component Libraries¶
Module types can be stored in files separate from the place of their actual use, enabling the user to group existing module types and create component libraries.
2.3.1.4 Universal Standalone Simulation Programs¶
A simulation executable can store several independent models that use the same set of simple modules. The user can specify in the configuration file which model is to be run. This allows one to build one large executable that contains several simulation models, and distribute it as a standalone simulation tool. The flexibility of the topology description language also supports this approach.
2.3.2 What Is in the Distribution¶
An OMNeT++ installation contains the following subdirectories. Depending on the platform, there may also be additional directories present, containing software bundled with OMNeT++.)
The simulation system itself:
omnetpp/ OMNeT++ root directory
bin/ OMNeT++ executables
include/ header files for simulation models
lib/ library files
images/ icons and backgrounds for network graphics
doc/ manuals, readme files, license, APIs, etc.
ide-customization-guide/ how to write new wizards for the IDE
ide-developersguide/ writing extensions for the IDE
manual/ manual in HTML
ned2/ DTD definition of the XML syntax for NED files
tictoc-tutorial/ introduction to using OMNeT++
api/ API reference in HTML
nedxml-api/ API reference for the NEDXML library
parsim-api/ API reference for the parallel simulation library
src/ OMNeT++ sources
sim/ simulation kernel
parsim/ files for distributed execution
netbuilder/files for dynamically reading NED files
envir/ common code for user interfaces
cmdenv/ command-line user interface
qtenv/ Qt-based user interface
nedxml/ NEDXML library, opp_nedtool, opp_msgtool
scave/ result analysis library, opp_scavetool
eventlog/ eventlog processing library
layout/ graph layouter for network graphics
common/ common library
utils/ opp_makemake, opp_test, etc.
ide/ Simulation IDE
python/ Python libraries for OMNeT++
omnetpp/ Python package name
scave/ Python API for result analysis
...
test/ Regression test suite
core/ tests for the simulation library
anim/ tests for graphics and animation
dist/ tests for the built-in distributions
makemake/ tests for opp_makemake
...
The Eclipse-based Simulation IDE is in the ide directory.
ide/ Simulation IDE
features/ Eclipse feature definitions
plugins/ IDE plugins (extensions to the IDE can be dropped here)
...
The Windows version of OMNeT++ contains a redistribution of the MinGW gcc compiler, together with a copy of MSYS that provides Unix tools commonly used in Makefiles. The MSYS directory also contains various 3rd party open-source libraries needed to compile and run OMNeT++.
tools/ Platform-specific tools and compilers (e.g. MinGW/MSYS on Windows)
Sample simulations are in the samples directory.
samples/ directories for sample simulations
aloha/ models the Aloha protocol
cqn/ Closed Queueing Network
...
The contrib directory contains material from the OMNeT++ community.
contrib/ directory for contributed material
akaroa/ Patch to compile akaroa on newer gcc systems
topologyexport/ Export the topology of a model in runtime
...
3 The NED Language¶
3.1 NED Overview¶
The user describes the structure of a simulation model using the NED language. NED, which stands for Network Description, allows the user to declare simple modules, and connect and assemble them into compound modules. The user can label some compound modules as networks, indicating that they are self-contained simulation models. Channels are also supported as a component type, whose instances can be used in compound modules.
The NED language has several features that allow it to scale well to large projects:
- Hierarchical. OMNeT++ helps manage complexity through a hierarchical module system.
Any module that would be too complex as a single entity can be
broken down into smaller modules and used as a compound module.
- Component-Based. Simple modules and compound modules are inherently
reusable, which not only reduces code copying, but more importantly, allows
component libraries like the INET Framework to exist.
- Interfaces. Module and channel interfaces can be used as placeholders
instead of specific module or channel types. The concrete module or channel type
is determined at network setup time using a parameter. Concrete module types
must “implement” the interface they substitute. For example, a compound module
type called MobileHost may contain a mobility submodule of type
IMobility, where IMobility is a module interface. The actual type
of mobility can be chosen from the module types that implement
IMobility (such as RandomWalkMobility, TurtleMobility, etc.).
- Inheritance. Modules and channels can be subclassed, with derived modules
and channels being able to add new parameters, gates, and (in the case of compound
modules) submodules and connections. Existing parameters can be set to specific
values, and the gate size of a gate vector can also be set. This allows, for
example, taking a GenericTcpClientApp module and deriving a
FileTransferApp from it by setting certain parameters to fixed values.
- Packages. The NED language features a Java-like package structure to
reduce the risk of name clashes between different models. Additionally, a
NEDPATH (similar to Java's CLASSPATH) has been introduced to
facilitate the specification of dependencies among simulation models.
- Inner types. Channel types and module types used locally within a
compound module can be defined within the compound module itself to minimize
namespace pollution.
- Metadata annotations. Module or channel types, parameters, gates, and submodules can be annotated with properties. Metadata is not used directly by the simulation kernel, but it can provide additional information to various tools, the runtime environment, or even other modules in the model. For example, metadata annotations can specify a module's graphical representation (such as an icon) or the prompt string and measurement unit (such as milliwatt) of a parameter.
- NOTE
This chapter will gradually explain the NED language through examples. A more formal and concise treatment can be found in Appendix [20].
3.2 NED Quickstart¶
In this section, we introduce the NED language using a complete and reasonably real-life example: a communication network.
Our hypothetical network consists of nodes. Each node runs an application that generates packets at random intervals. The nodes also act as routers. We assume that the application uses datagram-based communication, so we can exclude the transport layer from the model.
3.2.1 The Network¶
First, we define the network and then, in the next sections, we continue to define the network nodes.
Let the network topology be as shown in Figure below.
The corresponding NED description would be as follows:
//
// A network
//
network Network
{
submodules:
node1: Node;
node2: Node;
node3: Node;
...
connections:
node1.port++ <--> {datarate=100Mbps;} <--> node2.port++;
node2.port++ <--> {datarate=100Mbps;} <--> node4.port++;
node4.port++ <--> {datarate=100Mbps;} <--> node6.port++;
...
}
The above code defines a network type named Network. Note that the NED language uses the customary curly brace syntax and // to denote comments.
- NOTE
Comments in NED not only enhance the readability of the source code, but also appear at various places (tooltips, content assist, etc) in the OMNeT++ IDE and become part of the documentation extracted from the NED files. The NED documentation system, similar to JavaDoc or Doxygen, will be described in Chapter [14].
The network contains several nodes named node1, node2, etc. from the NED module type Node. We will define Node in the following sections.
The second half of the declaration specifies how the nodes are connected. The double arrow represents a bidirectional connection. The connection points of modules are called gates, and the notation port++ adds a new gate to the port[] gate vector. Gates and connections will be discussed in more detail in sections [3.7] and [3.9]. The nodes are connected with a channel that has a data rate of 100Mbps.
- NOTE
In many other systems, the equivalent of OMNeT++ gates are called ports. We have chosen to retain the term gate to avoid confusion with other uses of the word port: router port, TCP port, I/O port, etc.
The above code would be placed in a file named Net6.ned. It is conventional to put each NED definition in its own file and name the file accordingly, but it is not mandatory.
Any number of networks can be defined in the NED files, and for each simulation, the user needs to specify which network to set up. The usual way to specify the network is to include the network option in the configuration (usually the omnetpp.ini file):
[General] network = Network
3.2.2 Introducing a Channel¶
It is inconvenient to repeat the data rate for every connection. Fortunately, NED provides a convenient solution: it allows the creation of a new channel type that encapsulates the data rate setting. This channel type can be defined inside the network so that it does not clutter the global namespace.
The improved network would look like this:
//
// A Network
//
network Network
{
types:
channel C extends ned.DatarateChannel {
datarate = 100Mbps;
}
submodules:
node1: Node;
node2: Node;
node3: Node;
...
connections:
node1.port++ <--> C <--> node2.port++;
node2.port++ <--> C <--> node4.port++;
node4.port++ <--> C <--> node6.port++;
...
}
Later sections will cover the concepts used (inner types, channels, the DatarateChannel built-in type, inheritance) in detail.
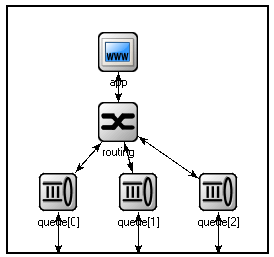
3.2.3 The App, Routing, and Queue Simple Modules¶
Simple modules are the basic building blocks for other (compound) modules, denoted by the simple keyword. All active behavior in the model is encapsulated in simple modules. Behavior is defined by a C++ class; NED files only declare the externally visible interface of the module (gates, parameters).
In our example, we could define Node as a simple module. However, its functionality is quite complex (such as traffic generation, routing, etc.), so it is better to implement it with several smaller simple module types. We will assemble these modules into a compound module. We will have one simple module for traffic generation (App), one for routing (Routing), and one for queueing up packets to be sent out (Queue). For brevity, we omit the bodies of the latter two in the following code.
simple App
{
parameters:
int destAddress;
...
@display("i=block/browser");
gates:
input in;
output out;
}
simple Routing
{
...
}
simple Queue
{
...
}
According to convention, the above simple module declarations go into App.ned, Routing.ned, and Queue.ned files.
- NOTE
Note that module type names (App, Routing, Queue) begin with a capital letter, while parameter and gate names begin with lowercase. This is the recommended naming convention. Capitalization matters because the language is case-sensitive.
Let's consider the first simple module type declaration. App has a parameter called destAddress (with others omitted for now) and two gates named out and in for sending and receiving application packets.
The argument of @display() is called a display string, which defines the rendering of the module in graphical environments. In @display("i=..."), "i=..." defines the default icon.
In general, attributes starting with @ like @display are called properties in NED. They are used to annotate various objects with metadata. Properties can be attached to files, modules, parameters, gates, connections, and other objects, and parameter values have a flexible syntax.
3.2.4 The Node Compound Module¶
Now we can assemble App, Routing, and Queue into the compound module Node. A compound module can be thought of as a “cardboard box” that groups other modules into a larger unit, which can further be used as a building block for other modules. Networks are also a kind of compound module.
module Node
{
parameters:
int address;
@display("i=misc/node_vs,gold");
gates:
inout port[];
submodules:
app: App;
routing: Routing;
queue[sizeof(port)]: Queue;
connections:
routing.localOut --> app.in;
routing.localIn <-- app.out;
for i=0..sizeof(port)-1 {
routing.out[i] --> queue[i].in;
routing.in[i] <-- queue[i].out;
queue[i].line <--> port[i];
}
}
Compound modules, like simple modules, may have parameters and gates. Our Node module contains an address parameter and a gate vector named port of unspecified size. The actual gate vector size will be determined implicitly by the number of neighbors when we create a network from nodes of this type. The type of port[] is inout, which allows bidirectional connections.
The modules that make up the compound module are listed under submodules. Our Node compound module type has an app and a routing submodule, plus a queue[] submodule vector that contains one Queue module for each port, as specified by [sizeof(port)]. (Referring to [sizeof(port)] is allowed because the network is built in a top-down order, and the node is already created and connected at the network level when its submodule structure is built out.)
In the connections section, the submodules are connected to each other and to the parent module. Single arrows are used to connect input and output gates, while double arrows connect inout gates. A for loop is utilized to connect the routing module to each queue module and to connect the outgoing/incoming link (line gate) of each queue to the corresponding port of the enclosing module.
3.2.5 Putting It Together¶
We have created the NED definitions for this example, but how are they used by OMNeT++? When the simulation program is started, it loads the NED files. The program should already include the C++ classes that implement the required simple modules, App, Routing, and Queue. The C++ code for these modules is either part of the executable or loaded from a shared library. The simulation program also loads the configuration (omnetpp.ini) and determines from it that the simulation model to be run is the Network network. Then, the network is instantiated for simulation.
The simulation model is built in a top-down preorder fashion. Starting from an empty system module, all submodules are created, their parameters and gate vector sizes are assigned, and they are fully connected before the submodule internals are built.
In the following sections, we will delve deeper into the elements of the NED language and examine them in greater detail.
3.3 Simple Modules¶
Simple modules are the active components in the model. Simple modules are defined with the simple keyword.
An example simple module:
simple Queue
{
parameters:
int capacity;
@display("i=block/queue");
gates:
input in;
output out;
}
Both the parameters and gates sections are optional, that is, they can be left out if there are no parameters or gates. In addition, the parameters keyword itself is optional too; it can be left out even if there are parameters or properties.
Note that the NED definition doesn't contain any code to define the operation of the module: that part is expressed in C++. By default, OMNeT++ looks for C++ classes of the same name as the NED type (so here, Queue).
One can explicitly specify the C++ class with the @class property. Classes with namespace qualifiers are also accepted, as shown in the following example that uses the mylib::Queue class:
simple Queue
{
parameters:
int capacity;
@class(mylib::Queue);
@display("i=block/queue");
gates:
input in;
output out;
}
If there are several modules whose C++ implementation classes are in the same namespace, a better alternative to @class is the @namespace property. The C++ namespace given with @namespace will be prepended to the normal class name. In the following example, the C++ classes will be mylib::App, mylib::Router and mylib::Queue:
@namespace(mylib);
simple App {
...
}
simple Router {
...
}
simple Queue {
...
}
The @namespace property may not only be specified at the file level as in the above example, but for packages as well. When placed in a file called package.ned, the namespace will apply to all components in that package and below.
The implementation C++ classes need to be subclassed from the cSimpleModule library class; chapter [4] of this manual describes in detail how to write them.
Simple modules can be extended (or specialized) via subclassing. The motivation for subclassing can be to set some open parameters or gate sizes to a fixed value (see [3.6] and [3.7]), or to replace the C++ class with a different one. Now, by default, the derived NED module type will inherit the C++ class from its base, so it is important to remember that you need to write out @class if you want it to use the new class.
The following example shows how to specialize a module by setting a parameter to a fixed value (and leaving the C++ class unchanged):
simple Queue
{
int capacity;
...
}
simple BoundedQueue extends Queue
{
capacity = 10;
}
In the next example, the author wrote a PriorityQueue C++ class, and wants to have a corresponding NED type, derived from Queue. However, it does not work as expected:
simple PriorityQueue extends Queue // wrong! still uses the Queue C++ class
{
}
The correct solution is to add a @class property to override the inherited C++ class:
simple PriorityQueue extends Queue
{
@class(PriorityQueue);
}
Inheritance in general will be discussed in section [3.13].
3.4 Compound Modules¶
A compound module groups other modules into a larger unit. A compound
module may have gates and parameters like a simple module, but no active
behavior is associated with it.
- [Although the C++ class
for a compound module can be overridden with the @class property,
this is a feature that should probably never be used. Encapsulate the code
into a simple module, and add it as a submodule.]
- NOTE
When there is a temptation to add code to a compound module, then encapsulate the code into a simple module, and add it as a submodule.
A compound module declaration may contain several sections, all of them optional:
module Host
{
types:
...
parameters:
...
gates:
...
submodules:
...
connections:
...
}
Modules contained in a compound module are called submodules, and they are listed in the submodules section. One can create arrays of submodules (i.e. submodule vectors), and the submodule type may come from a parameter.
Connections are listed under the connections section of the declaration. One can create connections using simple programming constructs (loop, conditional). Connection behavior can be defined by associating a channel with the connection; the channel type may also come from a parameter.
Module and channel types only used locally can be defined in the types section as inner types, so that they do not pollute the namespace.
Compound modules may be extended via subclassing. Inheritance may add new
submodules and new connections as well, not only parameters and gates.
Also, one may refer to inherited submodules, inherited types, etc. What
is not possible is to "de-inherit" or modify submodules or connections.
- [With one exception: Since OMNeT++ version 5.6, reconnecting
existing gates is possible using the reconnect property, see
[3.9.2].]
In the following example, we show how to assemble common protocols into a “stub”
for wireless hosts, and add user agents via subclassing.
- [Module types,
gate names, etc. used in the examples are fictional, not based on an actual
OMNeT++-based model framework]
module WirelessHostBase
{
gates:
input radioIn;
submodules:
tcp: TCP;
ip: IP;
wlan: Ieee80211;
connections:
tcp.ipOut --> ip.tcpIn;
tcp.ipIn <-- ip.tcpOut;
ip.nicOut++ --> wlan.ipIn;
ip.nicIn++ <-- wlan.ipOut;
wlan.radioIn <-- radioIn;
}
module WirelessHost extends WirelessHostBase
{
submodules:
webAgent: WebAgent;
connections:
webAgent.tcpOut --> tcp.appIn++;
webAgent.tcpIn <-- tcp.appOut++;
}
The WirelessHost compound module can further be extended, for example with an Ethernet port:
module DesktopHost extends WirelessHost
{
gates:
inout ethg;
submodules:
eth: EthernetNic;
connections:
ip.nicOut++ --> eth.ipIn;
ip.nicIn++ <-- eth.ipOut;
eth.phy <--> ethg;
}
3.5 Channels¶
Channels encapsulate parameters and behavior associated with connections. Channels are like simple modules, in the sense that there are C++ classes behind them. The rules for finding the C++ class for a NED channel type are the same as with simple modules: the default class name is the NED type name unless there is a @class property (@namespace is also recognized), and the C++ class is inherited when the channel is subclassed.
Thus, the following channel type would expect a CustomChannel C++ class to be present:
channel CustomChannel // requires a CustomChannel C++ class
{
}
The practical difference compared to modules is that one rarely needs to write a custom channel C++ class because there are predefined channel types that one can subclass from, inheriting their C++ code. The predefined types are: ned.IdealChannel, ned.DelayChannel, and ned.DatarateChannel. (“ned” is the package name; one can get rid of it by importing the types with the import ned.* directive. Packages and imports are described in section [3.14].)
IdealChannel has no parameters and lets all messages through without delay or any side effect. A connection without a channel object and a connection with an IdealChannel behave in the same way. Still, IdealChannel has its uses, for example, when a channel object is required so that it can carry a new property or parameter that is going to be read by other parts of the simulation model.
DelayChannel has two parameters:
- delay is a double parameter that represents the propagation delay of the message. Values need to be specified together with a time unit (s, ms, us, etc.)
- disabled is a Boolean parameter that defaults to false; when set to true, the channel object will drop all messages.
DatarateChannel has a few additional parameters compared to DelayChannel:
- datarate is a double parameter that represents the data rate of the channel. Values need to be specified in bits per second or its multiples as a unit (bps, kbps, Mbps, Gbps, etc.) Zero is treated specially and results in zero transmission duration, i.e. it stands for infinite bandwidth. Zero is also the default. Data rate is used for calculating the transmission duration of packets.
- ber and per stand for Bit Error Rate and Packet Error Rate and allow basic error modeling. They expect a double in the [0,1] range. When the channel decides (based on random numbers) that an error occurred during the transmission of a packet, it sets an error flag in the packet object. The receiver module is expected to check the flag and discard the packet as corrupted if it is set. The default ber and per are zero.
- NOTE
There is no channel parameter that specifies whether the channel delivers the message object to the destination module at the end or at the start of the reception; that is decided by the C++ code of the target simple module. See the setDeliverOnReceptionStart() method of cGate.
The following example shows how to create a new channel type by specializing DatarateChannel:
channel Ethernet100 extends ned.DatarateChannel
{
datarate = 100Mbps;
delay = 100us;
ber = 1e-10;
}
- NOTE
The three built-in channel types are also used for connections where the channel type is not explicitly specified.
One may add parameters and properties to channels via subclassing and may modify existing ones. In the following example, we introduce distance-based calculation of the propagation delay:
channel DatarateChannel2 extends ned.DatarateChannel
{
double distance @unit(m);
delay = this.distance / 200000km * 1s;
}
Parameters are primarily intended to be read by the underlying C++ class, but new parameters may also be added as annotations to be used by other parts of the model. For example, a cost parameter may be used for routing decisions in the routing module, as shown in the example below. The example also shows annotation using properties (@backbone).
channel Backbone extends ned.DatarateChannel
{
@backbone;
double cost = default(1);
}
3.6 Parameters¶
Parameters are variables that belong to a module. Parameters can be used in building the topology (number of nodes, etc), and to supply input to C++ code that implements simple modules and channels.
Parameters can be of type double, int, bool, string, xml, and object; they can also be declared volatile. For the numeric types, a unit of measurement can also be specified (@unit property).
Parameters can get their value from NED files or from the configuration (omnetpp.ini). A default value can also be given (default(...)), which is used if the parameter is not otherwise assigned.
The following example shows a simple module that has five parameters, three of which have default values:
simple App
{
parameters:
string protocol; // protocol to use: "UDP" / "IP" / "ICMP" / ...
int destAddress; // destination address
volatile double sendInterval @unit(s) = default(exponential(1s));
// time between generating packets
volatile int packetLength @unit(byte) = default(100B);
// length of one packet
volatile int timeToLive = default(32);
// maximum number of network hops to survive
gates:
input in;
output out;
}
3.6.1 Assigning a Value¶
Parameters may get their values in several ways: from NED code, from the configuration (omnetpp.ini), or even interactively from the user. NED lets one assign parameters at several places: in subclasses via inheritance; in submodule and connection definitions where the NED type is instantiated; and in networks and compound modules that directly or indirectly contain the corresponding submodule or connection.
For instance, one could specialize the above App module type via inheritance with the following definition:
simple PingApp extends App
{
parameters:
protocol = "ICMP/ECHO"
sendInterval = default(1s);
packetLength = default(64byte);
}
This definition sets the protocol parameter to a fixed value ("ICMP/ECHO"), and changes the default values of the sendInterval and packetLength parameters. protocol is now locked down in PingApp, and its value cannot be modified via further subclassing or other ways. sendInterval and packetLength are still unassigned here, and only their default values have been overwritten.
Now, let us see the definition of a Host compound module that uses PingApp as submodule:
module Host
{
submodules:
ping : PingApp {
packetLength = 128B; // always ping with 128-byte packets
}
...
}
This definition sets the packetLength parameter to a fixed value. It is now hardcoded that Hosts send 128-byte ping packets; this setting cannot be changed from NED or the configuration.
It is not only possible to set a parameter from the compound module that contains the submodule, but also from modules higher up in the module tree. A network that employs several Host modules could be defined like this:
network Network
{
submodules:
host[100]: Host {
ping.timeToLive = default(3);
ping.destAddress = default(0);
}
...
}
Parameter assignment can also be placed into the parameters block of the parent compound module, which provides additional flexibility. The following definition sets up the hosts so that half of them ping host #50, and the other half ping host #0:
network Network
{
parameters:
host[*].ping.timeToLive = default(3);
host[0..49].ping.destAddress = default(50);
host[50..].ping.destAddress = default(0);
submodules:
host[100]: Host;
...
}
Note the use of asterisk to match any index, and .. to match index ranges.
If there were a number of individual hosts instead of a submodule vector, the network definition could look like this:
network Network
{
parameters:
host*.ping.timeToLive = default(3);
host{0..49}.ping.destAddress = default(50);
host{50..}.ping.destAddress = default(0);
submodules:
host0: Host;
host1: Host;
host2: Host;
...
host99: Host;
}
An asterisk matches any substring not containing a dot, and a .. within a pair of curly braces matches a natural number embedded in a string.
In most assignments we have seen above, the left hand side of the equal sign contained a dot and often a wildcard as well (asterisk or numeric range); we call these assignments pattern assignments or deep assignments.
There is one more wildcard that can be used in pattern assignments, and this is the double asterisk; it matches any sequence of characters including dots, so it can match multiple path elements. An example:
network Network
{
parameters:
**.timeToLive = default(3);
**.destAddress = default(0);
submodules:
host0: Host;
host1: Host;
...
}
Note that some assignments in the above examples changed default values, while others set parameters to fixed values. Parameters that received no fixed value in the NED files can be assigned from the configuration (omnetpp.ini).
- IMPORTANT
A non-default value assigned from NED cannot be overwritten later in NED or from ini files; it becomes “hardcoded” as far as ini files and NED usage are concerned.
A parameter can be assigned in the configuration using a similar syntax as NED pattern assignments (actually, it would be more historically accurate to say it the other way round, that NED pattern assignments use a similar syntax to ini files):
Network.host[*].ping.sendInterval = 500ms # for the host[100] example Network.host*.ping.sendInterval = 500ms # for the host0,host1,... example **.sendInterval = 500ms
One often uses the double asterisk to save typing. One can write
**.ping.sendInterval = 500ms
Or if one is certain that only ping modules have sendInterval parameters, the following will suffice:
**.sendInterval = 500ms
Parameter assignments in the configuration are described in section [10.3].
One can also write expressions, including stochastic expressions, in NED files and in ini files as well. For example, here's how one can add jitter to the sending of ping packets:
**.sendInterval = 1s + normal(0s, 0.001s) # or just: normal(1s, 0.001s)
If there is no assignment for a parameter in NED or in the ini file, the default value (given with =default(...) in NED) will be applied implicitly. If there is no default value, the user will be asked, provided the simulation program is allowed to do that; otherwise there will be an error. (Interactive mode is typically disabled for batch executions where it would do more harm than good.)
It is also possible to explicitly apply the default (this can sometimes be useful):
**.sendInterval = default
Finally, one can explicitly ask the simulator to prompt the user interactively for the value (again, provided that interactivity is enabled; otherwise this will result in an error):
**.sendInterval = ask
- NOTE
How can one decide whether to assign a parameter from NED or from an ini file? The advantage of ini files is that they allow a cleaner separation of the model and experiments. NED files (together with C++ code) are considered to be part of the model and to be more or less constant. Ini files, on the other hand, are for experimenting with the model by running it several times with different parameters. Thus, parameters that are expected to change (or make sense to be changed) during experimentation should be put into ini files.
3.6.2 Expressions¶
Parameter values may be given with expressions. NED language expressions have a
C-like syntax, with additions like quantities (numbers with measurement units,
e.g., 100Gbps) and JSON constructs. Compared to C, there are some
variations on operator names: binary and logical XOR are # and
##, while ^ has been reassigned to power-of instead. The
+ operator does string concatenation as well as numeric addition. There
are two extra operators: <=> (“spaceship”) and =
The spaceship operator <=> compares its two arguments and returns the result (“less”, “equal”, “greater” and “not applicable”) in the form of a negative, zero, positive or nan double number, respectively.
2 <=> 2 // --> 0
10 <=> 5 // --> 1
2 <=> nan // --> nan
The string match operator =
"foo" =~ "f*" // --> true
"foo" =~ "b*" // --> false
"foo" =~ "F*" // --> false
"foo.bar.baz" =~ "*.baz" // --> false
"foo.bar.baz" =~ "**.baz" // --> true
"foo[15]" =~ "foo[5..20]" // --> true
"foo15" =~ "foo{5..20}" // --> true
Expressions may refer to module parameters, gate vector and module vector sizes (using the sizeof operator), existence of a submodule or submodule vector (exists operator), and the index of the current module in a submodule vector (index).
The special operator expr() can be used to pass a formula into a module as a parameter ([3.6.9]).
Expressions may also utilize various numeric, string, stochastic, and miscellaneous other functions (fabs(), uniform(), lognormal(), etc.).
- NOTE
The list of NED functions can be found in Appendix [22]. The user can also extend NED with new functions.
3.6.3 Parameter References¶
Expressions may refer to parameters of the compound module being defined, parameters of the current module, and parameters of already defined submodules, with the syntax submodule.parametername (or submodule[index].parametername).
Unqualified parameter names refer to a parameter of the compound module, wherever it occurs within the compound module definition. For example, all foo references in the following example refer to the network's foo parameter.
network Network
{
parameters:
double foo;
double bar = foo;
submodules:
node[10]: Node {
baz = foo;
}
...
}
Use the this qualifier to refer to another parameter of the same submodule.
submodules:
node: Node {
datarate = this.amount / this.duration;
}
From OMNeT++ 5.7 onwards, there is also a parent qualifier with the obvious meaning.
- NOTE
The interpretation of names which are not qualified with either this or parent and occur within submodule/channel blocks is going to change in OMNeT++ 6.0: An unqualified name foo is going to refer to the parameter of the submodule itself, i.e., will be interpreted as this.foo. To create NED files which are compatible with both versions, make those parameter references explicit by using the parent qualifier: parent.foo. A similar rule applies to the arguments of sizeof and exists.
3.6.4 Volatile Parameters¶
Volatile parameters are those marked with the volatile modifier keyword. Normally, expressions assigned to parameters are evaluated once, and the resulting values are stored in the parameters. In contrast, a volatile parameter holds the expression itself, and it is evaluated every time the parameter is read. Therefore, if the expression contains a stochastic or changing component, such as normal(0,1) (a random value from the unit normal distribution) or simTime() (the current simulation time), reading the parameter may yield a different value every time.
- NOTE
Technically, non-volatile parameters may also contain stochastic values. However, the result of that would be that the simulation use a constant value throughout, chosen randomly at the beginning of the simulation. This is akin to running a randomly selected simulation rather than performing a Monte-Carlo simulation, hence, it is rarely desirable.
If a parameter is marked volatile, the C++ code that implements the corresponding module is expected to re-read the parameter every time a new value is needed, as opposed to reading it once and caching the value in a variable.
To demonstrate the use of volatile, suppose we have a Queue simple module that has a volatile double parameter named serviceTime.
simple Queue
{
parameters:
volatile double serviceTime;
}
Because of the volatile modifier, the C++ code underlying the queue module is supposed to read the serviceTime parameter for every job serviced. Thus, if a stochastic value like uniform(0.5s, 1.5s) is assigned to the parameter, the expression will be evaluated every time, and every job will likely have a different, random service time.
As another example, here's how one can have a time-varying parameter by exploiting the simTime() NED function:
**.serviceTime = simTime()<1000s ? 1s : 2s # queue that slows down after 1000s
3.6.5 Mutable Parameters¶
A parameter is marked as mutable by adding the @mutable property to it. Mutable parameters can be set to a different value during runtime, whereas normal, i.e., non-mutable parameters cannot be changed after their initial assignment (attempts to do so will result in an error being raised).
Parameter mutability addresses the fact that although it would be technically possible to allow changing the value of any parameter to a different value during runtime, it only really makes sense to do so if the change actually takes effect. Otherwise, users doing the change could be mislead.
For example, if a module is implemented in C++ in a way that it only reads a parameter once and then uses the cached value throughout, it would be misleading to allow changing the parameter's value during simulation. For a parameter to rightfully be marked as @mutable, module's implementation has to be explicitly prepared to handle runtime parameter changes (see section [4.5.7]).
As a practical example, a drop-tail queue module could have a maxLength parameter which controls the maximum number of elements the queue can hold. If it was allowed to set the maxLength parameter to a different value at runtime but the module would continue to operate according to the initially configured value throughout the entire simulation, that could falsify simulation results.
simple Queue
{
parameters:
int maxLength @mutable; // @mutable indicates that Queue's
// implementation is prepared for handling
// runtime changes in the value of the
// maximum queue length.
...
}
In a model framework that contains a large number of modules with many parameters, the presence or absence of @mutable allows the user to know which are the parameters whose runtime changes are properly handled by their modules. This is an important input for determining what kinds of experiments can be done with the model.
- HINT
Note that although volatile and @mutable are two different things, parameters marked volatile may often be marked @mutable as well.
- NOTE
@mutable affects backward compatibility. As it was introduced in OMNeT++ version 6.0, models written before that do not contain @mutable annotations. Such simulation models, if they rely on runtime parameter changes, may be run under OMNeT++ 6.0 by setting the parameter-mutability-check configuration option to false.
3.6.6 Units¶
One can declare a parameter to have an associated unit of measurement by adding the @unit property. An example:
simple App
{
parameters:
volatile double sendInterval @unit(s) = default(exponential(350ms));
volatile int packetLength @unit(byte) = default(4KiB);
...
}
The @unit(s) and @unit(byte) declarations specify the measurement unit for the parameter. Values assigned to parameters must have the same or compatible unit, i.e., @unit(s) accepts milliseconds, nanoseconds, minutes, hours, etc., and @unit(byte) accepts kilobytes, megabytes, etc., as well.
- NOTE
The list of units accepted by OMNeT++ is listed in the Appendix, see [19.5.11]. Unknown units (bogomips, etc.) can also be used, but there are no conversions for them, i.e., decimal prefixes will not be recognized.
The OMNeT++ runtime does a full and rigorous unit check on parameters to ensure "unit safety" of models. Constants should always include the measurement unit.
The @unit property of a parameter cannot be added or overridden in subclasses or in submodule declarations.
3.6.7 XML Parameters¶
OMNeT++ supports two explicit ways of passing structured data to a module using parameters: XML parameters and object parameters with JSON-style structured data. This section describes the former, and the next one the latter.
XML parameters are declared with the keyword xml. When using XML parameters, OMNeT++ will read the XML document for you, validate it against its DTD (if it contains one), and present the contents in a DOM-like object tree. It is also possible to assign a part (i.e., a subtree) of the document to the parameter; the subset can be selected using an XPath-subset notation. OMNeT++ caches the content of the document, so it is loaded only once even if it is referenced by multiple parameters.
Values for an XML parameter can be produced using the xmldoc() and the xml() functions. xmldoc() accepts a filename as an argument, while xml() parses its string argument as XML content. Of course, one can assign xml parameters both from NED and from omnetpp.ini.
The following example declares an xml parameter and assigns the contents of an XML file to it. The file name is understood as being relative to the working directory.
simple TrafGen {
parameters:
xml profile;
gates:
output out;
}
module Node {
submodules:
trafGen1 : TrafGen {
profile = xmldoc("data.xml");
}
...
}
xmldoc() also lets one select an element within an XML document. In case a simulation model contains numerous modules that need XML input, this feature allows the user to get rid of many small XML files by aggregating them into a single XML file. For example, the following XML file contains two profiles identified with the IDs gen1 and gen2:
<?xml>
<root>
<profile id="gen1">
<param>1</param>
<param>3</param>
</profile>
<profile id="gen2">
<param>9</param>
</profile>
</root>
And one can assign each profile to a corresponding submodule using an XPath-like expression:
module Node {
submodules:
trafGen1 : TrafGen {
profile = xmldoc("all.xml", "/root/profile[@id='gen1']");
}
trafGen2 : TrafGen {
profile = xmldoc("all.xml", "/root/profile[@id='gen2']");
}
}
The following example shows how to specify XML content using a string literal with the xml() function. This is especially useful for specifying a default value.
simple TrafGen {
parameters:
xml profile = xml("<root/>"); // empty document as default
...
}
The xml() function, like xmldoc(), also supports an optional second XPath parameter for selecting a subtree.
3.6.8 Object Parameters and Structured Data¶
Object parameters are declared with the keyword object. The values of object parameters are C++ objects, which can hold arbitrary data and can be constructed in various ways in NED. Although object parameters were introduced in OMNeT++ only in version 6.0, they are now the preferred way of passing structured data to modules.
There are two basic constructs in NED for creating objects: the array and the object syntax. The array syntax is a pair of square brackets that encloses the list of comma-separated array elements: [ value1, value2, ... ]. The object (a.k.a. dictionary) syntax uses curly braces around key-value pairs, with the separators being colon and comma: { key1 : value1, key2 : value2, ... }. These constructs can be composed, so an array may contain objects and further arrays as elements, and similarly, an object may contain arrays and further objects as values, and so on. This allows describing complex data structures, with a JSON-like notation.
The notation is only JSON-like, as the syntax rules are more relaxed than in JSON. All valid JSON is accepted, but also more. The main difference is that in JSON, values in arrays and objects may only be constants or null, while OMNeT++ allows NED expressions as values: quantities, nan/inf, parameter references, functions, arithmetic operations, etc., are all accepted. Also, unlike strict JSON, NED allows quotation marks around object keys to be left out, as long as the key complies with the identifier syntax.
Another extension is that for objects, the desired C++ class may be specified in front of the open curly brace: classname { key1 : value1, ... }. The object will be created and filled in using OMNeT++'s reflection features. This allows internal data structures of modules to be filled out directly, eliminating most of the “parsing” code which is otherwise necessary. More about this feature will be written in the chapter about C++ programming (section [4.5.3]).
Object parameters with JSON-style values obsolete several workarounds that were used in pre-6.0 OMNeT++ versions for passing structured data to modules, such as using strings to specify numeric arrays or using text files of ad-hoc syntax as configuration or data files. JSON-style values are also more convenient than XML input.
After this introduction, let's see some examples! We begin with a list of completely made-up object parameter assignments to show the syntax and possibilities:
simple Example {
parameters:
object array1 = []; // empty array
object array2 = [2, 5, 3, -1]; // array of integers
object array3 = [ 3, 24.5mW, "Hello", false, true ]; // misc array
object array4 = [ nan, inf, inf s, null, nullptr ]; // special values
object object1 = {}; // empty object
object object2 = { foo: 100, bar: "Hello" }; // object with 2 fields
object object3 = { "foo": 100, "bar": "Hello" }; // keys with quotes
// composition of objects and arrays
object array5 = [ [1,2,3], [4,5,6], [7,8,9] ];
object array6 = [ { foo: 100, bar: "Hello" }, { baz: false } ];
object object4 = { foo : [1,2,3], bar : [4,5,6] };
object object5 = { obj : { foo: 1, bar: 2 }, array: [1, 2, 3 ] };
// expression, parameter references
double x = default(1);
object misc = [ x, 2*x, floor(3.14), uniform(0,10) ]; // [1,2,3,?]
// default values
object default1 = default([]); // empty array by default
object default2 = default({}); // empty object by default
object default3 = default([1,2,3]); // some array by default
object default4 = default(nullptr); // null pointer by default
}
The following, more practical example demonstrates how one could describe an IPv4 routing table. Each route is represented as an object, and the table itself is represented as an array of routes.
object routes = [
{ dest: "10.0.0.0", netmask: "255.255.0.0", interf: "eth0", metric:10 },
{ dest: "10.1.0.0", netmask: "255.255.0.0", interf: "eth1", metric:20 },
{ dest: "*", interf: "eth2" },
];
The next example shows the use of the extended object syntax for specifying a "template" for the packets that a traffic source module should generate. Note the stochastic expression for the byteLength field, and that the parameter is declared as volatile. Every time the module needs to send a packet, its C++ code should read the packetToSend parameter, which will cause the expression to be evaluated and a new packet of random length to be created that the module can send.
simple TrafficSource {
parameters:
volatile object packetToSend = default(cPacket {
name: "data",
kind: 10,
byteLength: intuniform(64,4096)
});
volatile double sendInterval @unit(s) = default(exponential(100ms));
}
Another traffic source module that supports a predetermined schedule of what to send at which points in time could have the following parameter to describe the schedule:
object sendSchedule = [
{ time: 1s, pk: cPacket { name: "pk1", byteLength: 64 } },
{ time: 2s, pk: cPacket { name: "pk2", byteLength: 76 } },
{ time: 3s, pk: cPacket { name: "pk3", byteLength: 32 } },
];
In the next example, we want to pass a trail given with its waypoints to a module. The module will get the data in an instance of a Trail C++ class expressly created for this purpose. This means that the module will get the trail data in a ready-to-use form just by reading the parameter, without having to do any parsing or additional processing.
We use a message file (chapter [5]) to define the classes; the C++ classes will be automatically generated by OMNeT++ from it.
// file: Trail.msg
struct Point {
double x;
double y;
}
class Trail extends cObject {
Point waypoints[];
}
An actual trail can be specified in NED like this:
object trail = Trail {
waypoints: [
{ x: 1, y : 5 },
{ x: 4, y : 6 },
{ x: 3, y : 8 },
{ x: 5, y : 3 }
]
};
Values for object parameters may also be placed in ini files, just like values for other parameter types. In ini files, indented lines are treated as continuations of the previous line, so the above example doesn't need trailing backslashes when moved to omnetpp.ini:
**.trail = Trail {
waypoints: [
{ x: 1, y : 5 },
{ x: 4, y : 6 },
{ x: 3, y : 8 },
{ x: 5, y : 3 }
]
}
3.6.9 Passing a Formula as Parameter¶
The special operator expr() allows one to pass a formula into a module as a parameter. expr() takes an expression as an argument, which syntactically must correspond to the general syntax of NED expressions. However, it is not a normal NED expression: it will not be interpreted and evaluated as one. Instead, it will be encapsulated into, and returned as, an object, and typically assigned to a module parameter.
The module may access the object via the parameter and may evaluate the expression encapsulated in it any number of times during simulation. While doing so, the module's code can freely determine how various identifiers and other syntactical elements in the expression are interpreted.
Let us see a practical example. In the model of a wireless network, one of the tasks is to compute the path loss suffered by each wirelessly transmitted frame as part of the procedure to determine whether the frame could be successfully received by the receiver node. There are several formulas for computing the path loss (free space, two-ray ground reflection, etc.), and it depends on multiple factors which one to use. If the model author wants to leave it open for their users to specify the formula they want to use, they might define the model like so:
simple RadioMedium {
parameters:
object pathLoss; // =expr(...): formula to compute path loss
...
}
The pathLoss parameter expects the formula to be given with expr(). The formula is expected to contain two variables, distance and frequency, which stand for the distance between the transmitter and the receiver and the packet transmission frequency, respectively. The module would evaluate the expression for each frame, binding values that correspond to the current frame to those variables.
Given the above, free space path loss would be specified to the module with the following formula (assuming isotropic antennas with the same polarization, etc.):
**.pathLoss = expr((4 * 3.14159 * distance * frequency / c) ^ 2)
The next example is borrowed from the INET Framework, which extensively uses expr() for specifying packet filter conditions. A few examples:
expr(hasBitError) expr(name == 'P1') expr(name =~ 'P*') expr(totalLength == 128B) expr(ipv4.destAddress.str() == '10.0.0.1' && udp.destPort == 42)
The interesting part is that the packet itself does not appear explicitly in the expressions. Instead, identifiers like hasBitError and name are interpreted as attributes of the packet, as if the user had written e.g. pk.hasBitError and pk.name. Similarly, ipv4 and udp stand for the IPv4 and UDP headers of the packet. The last line also shows that the interpretation of member accesses and method calls is also in the hands of the module's code.
The details of implementing expr() support in modules will be described as part of the simulation library, in section [7.8].
3.7 Gates¶
Gates are the connection points of modules. OMNeT++ has three types of gates: input, output, and inout, the latter being essentially an input and an output gate glued together.
A gate, whether input or output, can only be connected to one other gate. (For compound module gates, this means one connection “outside” and one “inside”.) It is possible, though generally not recommended, to connect the input and output sides of an inout gate separately (see section [3.9]).
One can create single gates and gate vectors. The size of a gate vector can be given inside square brackets in the declaration, but it is also possible to leave it open by just writing a pair of empty brackets ("[]").
When the gate vector size is left open, one can still specify it later when subclassing the module or when using the module for a submodule in a compound module. However, it does not need to be specified because one can create connections with the gate++ operator that automatically expands the gate vector.
The gate size can be queried from various NED expressions with the sizeof() operator.
NED normally requires that all gates be connected. To relax this requirement, one can annotate selected gates with the @loose property, which turns off the connectivity check for that gate. Also, input gates that solely exist so that the module can receive messages via sendDirect() (see [4.7.5]) should be annotated with @directIn. It is also possible to turn off the connectivity check for all gates within a compound module by specifying the allowunconnected keyword in the module's connections section.
Let us see some examples.
In the following example, the Classifier module has one input for receiving jobs, which it will send to one of the outputs. The number of outputs is determined by a module parameter:
simple Classifier {
parameters:
int numCategories;
gates:
input in;
output out[numCategories];
}
The following Sink module also has its in[] gate defined as a vector, so that it can be connected to several modules:
simple Sink {
gates:
input in[];
}
The following lines define a node for building a square grid. Gates around the edges of the grid are expected to remain unconnected; hence, the @loose annotation:
simple GridNode {
gates:
inout neighbour[4] @loose;
}
WirelessNode below is expected to receive messages (radio transmissions) via direct sending, so its radioIn gate is marked with @directIn.
simple WirelessNode {
gates:
input radioIn @directIn;
}
In the following example, we define TreeNode as having gates to connect any number of children, then subclass it to get a BinaryTreeNode to set the gate size to two:
simple TreeNode {
gates:
inout parent;
inout children[];
}
simple BinaryTreeNode extends TreeNode {
gates:
children[2];
}
An example for setting the gate vector size in a submodule, using the same TreeNode module type as above:
module BinaryTree {
submodules:
nodes[31]: TreeNode {
gates:
children[2];
}
connections:
...
}
3.8 Submodules¶
Modules that compose a compound module are called its submodules. A submodule has a name, and it is an instance of a compound or simple module type. In the NED definition of a submodule, this module type is usually given statically, but it is also possible to specify the type with a string expression. (The latter feature, parametric submodule types, will be discussed in section [3.11.1].)
NED also supports submodule arrays (vectors) and conditional submodules. Submodule vector size, unlike gate vector size, must always be specified and cannot be left open as with gates.
It is possible to add new submodules to an existing compound module via subclassing; this has been described in section [3.4].
The basic syntax of submodules is shown below:
module Node
{
submodules:
routing: Routing; // a submodule
queue[sizeof(port)]: Queue; // submodule vector
...
}
As seen in previous code examples, a submodule may also have a curly brace block as a body, where one can assign parameters, set the size of gate vectors, and add/modify properties like the display string (@display). It is not possible to add new parameters and gates.
Display strings specified here will be merged with the display string from the type to get the effective display string. The merge algorithm is described in chapter [8].
module Node
{
gates:
inout port[];
submodules:
routing: Routing {
parameters: // this keyword is optional
routingTable = "routingtable.txt"; // assign parameter
gates:
in[sizeof(port)]; // set gate vector size
out[sizeof(port)];
}
queue[sizeof(port)]: Queue {
@display("t=queue id $id"); // modify display string
id = 1000+index; // use submodule index to generate different IDs
}
connections:
...
}
An empty body may be omitted, that is,
queue: Queue;
is the same as
queue: Queue {
}
A submodule or submodule vector can be conditional. The if keyword and the condition itself go after the submodule type, as shown in the example below:
module Host
{
parameters:
bool withTCP = default(true);
submodules:
tcp : TCP if withTCP;
...
}
Note that with submodule vectors, setting a zero vector size can be used as an alternative to the if condition.
3.9 Connections¶
Connections are defined in the connections section of compound modules. Connections cannot span across hierarchy levels; one can connect two submodule gates, a submodule gate and the "inside" of the parent (compound) module's gates, or two gates of the parent module (though this is rarely useful), but it is not possible to connect to any gate outside the parent module, or inside compound submodules.
Input and output gates are connected with a normal arrow, and inout gates with a double-headed arrow “<-->”. To connect the two gates with a channel, use two arrows and put the channel specification in between. The same syntax is used to add properties such as @display to the connection.
Some examples have already been shown in the NED Quickstart section ([3.2]); let's see some more.
It has been mentioned that an inout gate is basically an input and an output gate glued together. These sub-gates can also be addressed (and connected) individually if needed, as port$i and port$o (or for vector gates, as port$i[$k$] and port$o[k]).
Gates are specified as modulespec.gatespec (to connect a submodule), or as gatespec (to connect the compound module). modulespec is either a submodule name (for scalar submodules), or a submodule name plus an index in square brackets (for submodule vectors). For scalar gates, gatespec is the gate name; for gate vectors it is either the gate name plus an index in square brackets, or gatename++.
The gatename++ notation causes the first unconnected gate index to be used. If all gates of the given gate vector are connected, the behavior is different for submodules and for the enclosing compound module. For submodules, the gate vector expands by one. For a compound module, after the last gate is connected, ++ will stop with an error.
- NOTE
Why is it not possible to expand a gate vector of the compound module? The model structure is built in top-down order, so new gates would be left unconnected on the outside, as there is no way in NED to "go back" and connect them afterwards.
When the ++ operator is used with $i or $o (e.g. g$i++ or g$o++, see later), it will actually add a gate pair (input+output) to maintain equal gate sizes for the two directions.
3.9.1 Channel Specification¶
Channel specifications (-->channelspec--> inside a connection) are similar to submodules in many respects. Let's see some examples!
The following connections use two user-defined channel types, Ethernet100 and Backbone. The code shows the syntax for assigning parameters (cost and length) and specifying a display string (and NED properties in general):
a.g++ <--> Ethernet100 <--> b.g++;
a.g++ <--> Backbone {cost=100; length=52km; ber=1e-8;} <--> b.g++;
a.g++ <--> Backbone {@display("ls=green,2");} <--> b.g++;
When using built-in channel types, the type name can be omitted; it will be inferred from the parameter names.
a.g++ <--> {delay=10ms;} <--> b.g++;
a.g++ <--> {delay=10ms; ber=1e-8;} <--> b.g++;
a.g++ <--> {@display("ls=red");} <--> b.g++;
If datarate, ber or per is assigned, ned.DatarateChannel will be chosen. Otherwise, if delay or disabled is present, it will be ned.DelayChannel; otherwise it is ned.IdealChannel. Naturally, if other parameter names are assigned in a connection without an explicit channel type, it will be an error (with “ned.DelayChannel has no such parameter” or similar message).
Connection parameters, similarly to submodule parameters, can also be assigned using pattern assignments, although the channel names to be matched with patterns are a little more complicated and less convenient to use. A channel can be identified with the name of its source gate plus the channel name; the channel name is currently always channel. It is illustrated by the following example:
module Queueing
{
parameters:
source.out.channel.delay = 10ms;
queue.out.channel.delay = 20ms;
submodules:
source: Source;
queue: Queue;
sink: Sink;
connections:
source.out --> ned.DelayChannel --> queue.in;
queue.out --> ned.DelayChannel <--> sink.in;
Using bidirectional connections is a bit trickier, because both directions must be covered separately:
network Network
{
parameters:
hostA.g$o[0].channel.datarate = 100Mbps; // the A -> B connection
hostB.g$o[0].channel.datarate = 100Mbps; // the B -> A connection
hostA.g$o[1].channel.datarate = 1Gbps; // the A -> C connection
hostC.g$o[0].channel.datarate = 1Gbps; // the C -> A connection
submodules:
hostA: Host;
hostB: Host;
hostC: Host;
connections:
hostA.g++ <--> ned.DatarateChannel <--> hostB.g++;
hostA.g++ <--> ned.DatarateChannel <--> hostC.g++;
Also, with the ++ syntax it is not always easy to figure out which gate indices map to the connections one needs to configure. If connection objects could be given names to override the default name “channel”, that would make it easier to identify connections in patterns. This feature is described in the next section.
3.9.2 Reconnecting Gates¶
Normally, it is an error for NED connection to refer to a gate which is already connected. This behavior can be overridden with the @reconnect property. A syntax example:
a.out --> {@reconnect;} --> b.in;
When a connection with the @reconnect property is encountered by the network builder, it first checks whether any of the involved gates are connected. If they are, it will unconnect them before proceeding to create the new connection.
The usefulness of @reconnect lies with inheritance, as it allows one to modify connections in the base compound module. For example, it is possible to insert a new submodule in the path between two connected submodules, which eliminates the need for "hook" submodules in compound modules that are meant to be very configurable. This is illustrated in the following example:
module Base {
submodules:
a: A;
b: B;
connections:
a.out --> b.in;
}
module Derived extends Base {
submodules:
c: C; // inserted between a and b
connections:
a.out --> {@reconnect;} --> c.in;
c.out --> {@reconnect;} --> b.in;
}
3.9.3 Channel Names¶
The default name given to channel objects is "channel". Since OMNeT++ 4.3, it is possible to specify the name explicitly and also to override the default name per channel type. The purpose of custom channel names is to make addressing easier when channel parameters are assigned from ini files.
The syntax for naming a channel in a connection is similar to submodule syntax: name: type. Since both name and type are optional, the colon must be there after name even if type is missing, in order to remove the ambiguity.
Examples:
r1.pppg++ <--> eth1: EthernetChannel <--> r2.pppg++;
a.out --> foo: {delay=1ms;} --> b.in;
a.out --> bar: --> b.in;
In the absence of an explicit name, the channel name comes from the @defaultname property of the channel type if that exists.
channel Eth10G extends ned.DatarateChannel like IEth {
@defaultname(eth10G);
}
There's a catch with @defaultname though: if the channel type is specified with a **.channelname.liketype= line in an ini file, then the channel type's @defaultname cannot be used as channelname in that configuration line because the channel type would only be known as a result of using that very configuration line. To illustrate the problem, consider the above Eth10G channel and a compound module containing the following connection:
r1.pppg++ <--> <> like IEth <--> r2.pppg++;
Then consider the following ini file:
**.eth10G.typename = "Eth10G" # Won't match! The eth10G name would come from
# the Eth10G type - catch-22!
**.channel.typename = "Eth10G" # OK, as lookup assumes the name "channel"
**.eth10G.datarate = 10.01Gbps # OK, channel already exists with name "eth10G"
The anomaly can be avoided by using an explicit channel name in the connection, not using @defaultname, or by specifying the type via a module parameter (e.g. writing <param> like ... instead of <> like ...).
3.10 Multiple Connections¶
Simple programming constructs (loop, conditional) allow for creating multiple connections easily.
This will be demonstrated in the following examples.
3.10.1 Examples¶
3.10.1.1 Chain¶
A chain of modules can be created as follows:
module Chain
parameters:
int count;
submodules:
node[count] : Node {
gates:
port[2];
}
connections allowunconnected:
for i = 0..count-2 {
node[i].port[1] <--> node[i+1].port[0];
}
}
3.10.1.2 Binary Tree¶
A binary tree can be built in the following way:
simple BinaryTreeNode {
gates:
inout left;
inout right;
inout parent;
}
module BinaryTree {
parameters:
int height;
submodules:
node[2^height-1]: BinaryTreeNode;
connections allowunconnected:
for i=0..2^(height-1)-2 {
node[i].left <--> node[2*i+1].parent;
node[i].right <--> node[2*i+2].parent;
}
}
Note that not every gate of the modules will be connected. By default, an unconnected gate produces a run-time error message when the simulation is started, but this error message is turned off here with the allowunconnected modifier. Consequently, it is the simple modules' responsibility not to send on an unconnected gate.
3.10.1.3 Random Graph¶
Conditional connections can be used to generate random topologies, for example. The following code generates a random subgraph of a full graph:
module RandomGraph {
parameters:
int count;
double connectedness; // 0.0<x<1.0
submodules:
node[count]: Node {
gates:
in[count];
out[count];
}
connections allowunconnected:
for i=0..count-1, for j=0..count-1 {
node[i].out[j] --> node[j].in[i]
if i!=j && uniform(0,1)<connectedness;
}
}
Note the use of the allowunconnected modifier here as well, to turn off error messages produced by the network setup code for unconnected gates.
3.10.2 Connection Patterns¶
Several approaches can be used to create complex topologies with a regular structure; three of them are described below.
3.10.2.1 “Subgraph of a Full Graph”¶
This pattern takes a subset of the connections of a full graph. A condition is used to “carve out” the necessary interconnection from the full graph:
for i=0..N-1, for j=0..N-1 {
node[i].out[...] --> node[j].in[...] if condition(i,j);
}
The RandomGraph compound module (presented earlier) is an example of this pattern, but the pattern can generate any graph where an appropriate condition(i,j) can be formulated. For example, when generating a tree structure, the condition would determine whether node j is a child of node i or vice versa.
Though this pattern is very general, its usage can be prohibitive if the number of nodes N is high and the graph is sparse (having much fewer than N2 connections). The following two patterns do not suffer from this drawback.
3.10.2.2 “Connections of Each Node”¶
The pattern loops through all nodes and creates the necessary connections for each one. It can be generalized as follows:
for i=0..Nnodes, for j=0..Nconns(i)-1 {
node[i].out[j] --> node[rightNodeIndex(i,j)].in[j];
}
The Hypercube compound module (to be presented later) is a clear example of this approach. The BinaryTree can also be regarded as an example of this pattern, with the inner j loop being unrolled.
The applicability of this pattern depends on how easily the rightNodeIndex(i,j) function can be determined.
3.10.2.3 “Enumerate All Connections”¶
A third pattern is to list all connections within a loop:
for i=0..Nconnections-1 {
node[leftNodeIndex(i)].out[...] --> node[rightNodeIndex(i)].in[...];
}
This pattern can be used if the leftNodeIndex(i) and rightNodeIndex(i) mapping functions can be adequately formulated.
The Chain module is an example of this approach where the mapping functions are extremely simple: leftNodeIndex(i)=i and rightNodeIndex(i) = i+1. This pattern can also be used to create a random subset of a full graph with a fixed number of connections.
In the case of irregular structures where none of the above patterns can be employed, one can resort to listing all connections, as one would do in most existing simulators.
3.11 Parametric Submodule and Connection Types¶
3.11.1 Parametric Submodule Types¶
A submodule type can be specified with a module parameter of type string, or in general, with any string-typed expression. The syntax uses the like keyword.
Let us begin with an example:
network Net6
{
parameters:
string nodeType;
submodules:
node[6]: <nodeType> like INode {
address = index;
}
connections:
...
}
This code creates a submodule vector whose module type will come from the nodeType parameter. For example, if nodeType is set to "SensorNode", then the module vector will consist of sensor nodes, provided such module type exists and it qualifies. What this means is that the INode must be an existing module interface, which the SensorNode module type must implement (more about this later).
As already mentioned, one can write an expression between the angle brackets. The expression may use the parameters of the parent module and previously defined submodules, and it must yield a string value. For example, the following code is also valid:
network Net6
{
parameters:
string nodeTypePrefix;
int variant;
submodules:
node[6]: <nodeTypePrefix + "Node" + string(variant)> like INode {
...
}
The corresponding NED declarations:
moduleinterface INode
{
parameters:
int address;
gates:
inout port[];
}
module SensorNode like INode
{
parameters:
int address;
...
gates:
inout port[];
...
}
The syntax “<nodeType> like INode” has an issue when used with submodule vectors: it does not allow specifying different types for different indices. The following syntax is better suited for submodule vectors:
The expression between the angle brackets may be left out altogether, leaving a pair of empty angle brackets, <>:
module Node
{
submodules:
nic: <> like INic; // type name expression left unspecified
...
}
Now the submodule type name is expected to be defined via typename pattern assignments. Typename pattern assignments look like pattern assignments for the submodule's parameters, except that the parameter name is replaced by the typename keyword. Typename pattern assignments may also be written in the configuration file. In a network that uses the above Node NED type, typename pattern assignments would look like this:
network Network
{
parameters:
node[*].nic.typename = "Ieee80211g";
submodules:
node: Node[100];
}
A default value may also be specified between the angle brackets; it will be used if there is no typename assignment for the module:
module Node
{
submodules:
nic: <default("Ieee80211b")> like INic;
...
}
There must be exactly one module type that goes by the simple name Ieee80211b and also implements the module interface INic, otherwise, an error message will be issued. (The imports in Node's NED file play no role in the type resolution.) If there are two or more such types, one can remove the ambiguity by specifying the fully qualified module type name, i.e., one that also includes the package name:
module Node
{
submodules:
nic: <default("acme.wireless.Ieee80211b")> like INic; // made-up name
...
}
3.11.2 Conditional Parametric Submodules¶
When creating reusable compound modules, it is often useful to be able to make a parametric submodule optional. One solution is to let the user define the submodule type with a string parameter and not create the module when the parameter is set to the empty string. Like this:
module Node
{
parameters:
string tcpType = default("Tcp");
submodules:
tcp: <tcpType> like ITcp if tcpType != "";
}
However, this pattern, when used extensively, can lead to a large number of string parameters. Luckily, it is also possible to achieve the same effect with typename, without using extra parameters:
module Node
{
submodules:
tcp: <default("Tcp")> like ITcp if typename != "";
}
The typename operator in a submodule's if condition evaluates to the would-be type of the submodule. By using the typename != "" condition, we can let the user eliminate the tcp submodule by setting its typename to the empty string. For example, in a network that uses the above NED type, typename pattern assignments could look like this:
network Network
{
parameters:
node1.tcp.typename = "TcpExt"; // let node1 use a custom TCP
node2.tcp.typename = ""; // no TCP in node2
submodules:
node1: Node;
node2: Node;
}
Note that this trick does not work with submodule vectors. The reason is that the condition applies to the vector as a whole, while the type is per-element.
It is often also useful to be able to check, e.g., in the connections section, whether a conditional submodule has been created or not. This can be done with the exists() operator. An example:
module Node
{
...
connections:
ip.tcpOut --> tcp.ipIn if exists(ip) && exists(tcp);
}
Limitation: exists() may only be used after the submodule's occurrence in the compound module.
3.11.3 Parametric Connection Types¶
Parametric connection types work similarly to parametric submodule types, and the syntax is similar as well. A basic example that uses a parameter of the parent module:
a.g++ <--> <channelType> like IMyChannel <--> b.g++;
a.g++ <--> <channelType> like IMyChannel {@display("ls=red");} <--> b.g++;
The expression may use loop variables, parameters of the parent module, and parameters of submodules (e.g., host[2].channelType).
The type expression may also be absent, and then the type is expected to be specified using typename pattern assignments:
a.g++ <--> <> like IMyChannel <--> b.g++;
a.g++ <--> <> like IMyChannel {@display("ls=red");} <--> b.g++;
A default value may also be given:
a.g++ <--> <default("Ethernet100")> like IMyChannel <--> b.g++;
a.g++ <--> <default(channelType)> like IMyChannel <--> b.g++;
The corresponding type pattern assignments:
a.g$o[0].channel.typename = "Ethernet1000"; // A -> B channel b.g$o[0].channel.typename = "Ethernet1000"; // B -> A channel
3.12 Metadata Annotations (Properties)¶
NED properties are metadata annotations that can be added to modules, parameters, gates, connections, NED files, packages, and virtually anything in NED. @display, @class, @namespace, @mutable, @unit, @prompt, @loose, and @directIn are all properties that have been mentioned in previous sections, but those examples only scratch the surface of what properties are used for.
Using properties, one can attach extra information to NED elements. Some properties are interpreted by NED, by the simulation kernel; other properties may be read and used from within the simulation model, or provide hints for NED editing tools.
Properties are attached to the type, so one cannot have different properties defined per-instance. All instances of modules, connections, parameters, etc. created from any particular location in the NED files have identical properties.
The following example shows the syntax for annotating various NED elements:
@namespace(foo); // file property
module Example
{
parameters:
@node; // module property
@display("i=device/pc"); // module property
int a @unit(s) = default(1); // parameter property
gates:
output out @loose @labels(pk); // gate properties
submodules:
src: Source {
parameters:
@display("p=150,100"); // submodule property
count @prompt("Enter count:"); // adding a property to a parameter
gates:
out[] @loose; // adding a property to a gate
}
...
connections:
src.out++ --> { @display("ls=green,2"); } --> sink1.in; // connection prop.
src.out++ --> Channel { @display("ls=green,2"); } --> sink2.in;
}
3.12.1 Property Indices¶
Sometimes it is useful to have multiple properties with the same name, for example for declaring multiple statistics produced by a simple module. Property indices make this possible.
A property index is an identifier or a number in square brackets after the property name, such as eed and jitter in the following example:
simple App {
@statistic[eed](title="end-to-end delay of received packets";unit=s);
@statistic[jitter](title="jitter of received packets");
}
This example declares two statistics as @statistic properties, @statistic[eed] and @statistic[jitter]. Property values within the parentheses are used to supply additional information, like a more descriptive name (title="...") or a unit (unit=s). Property indices can be conveniently accessed from the C++ API as well; for example, it is possible to ask what indices exist for the "statistic" property, and it will return a list containing "eed" and "jitter").
In the @statistic example, the index was textual and meaningful, but neither is actually required. The following dummy example shows the use of numeric indices which may be ignored altogether by the code that interprets the properties:
simple Dummy {
@foo[1](what="apples";amount=2);
@foo[2](what="oranges";amount=5);
}
Note that without the index, the lines would actually define the same @foo property and would overwrite each other's values.
Indices also make it possible to override entries via inheritance:
simple DummyExt extends Dummy {
@foo[2](what="grapefruits"); // 5 grapefruits instead of 5 oranges
}
3.12.2 Data Model¶
Properties may contain data given in parentheses; the data model is quite flexible. To begin with, properties may contain no value or a single value:
@node; @node(); // same as @node @class(FtpApp2);
Properties may contain lists:
@foo(Sneezy,Sleepy,Dopey,Doc,Happy,Bashful,Grumpy);
They may contain key-value pairs separated by semicolons:
@foo(x=10.31; y=30.2; unit=km);
In key-value pairs, each value can be a (comma-separated) list:
@foo(coords=47.549,19.034;labels=vehicle,router,critical);
The above examples are special cases of the general data model. According to the data model, properties contain key-value list pairs separated by semicolons. Items in the value list are separated by commas. Wherever key is missing, values go on the value list of the default key, the empty string.
Value items may contain words, numbers, string constants, and some other characters, but not arbitrary strings. Whenever the syntax does not permit some value, it should be enclosed in quotes. This quoting does not affect the value because the parser automatically drops one layer of quotes; thus, @class(TCP) and @class("TCP") are exactly the same. If the quotes themselves need to be part of the value, an extra layer of quotes and escaping are the solution: @foo("\"some string\"").
There are also some conventions. One can use properties to tag NED elements; for example, a @host property could be used to mark all module types that represent various hosts. This property could be recognized, e.g. by editing tools, by topology discovery code inside the simulation model, etc.
The convention for such a “marker” property is that any extra data in it (i.e., within parentheses) is ignored, except a single word false, which has the special meaning of “turning off” the property. Thus, any simulation model or tool that interprets properties should handle all the following forms as equivalent to @host: @host(), @host(true), @host(anything-but-false), @host(a=1;b=2); and @host(false) should be interpreted as the lack of the @host tag.
3.12.3 Overriding and Extending Property Values¶
Properties defined on a module or channel type may be updated both by subclassing and when using type as a submodule or connection channel. One can add new properties and also modify existing ones.
When modifying a property, the new property is merged with the old one. The rules of merging are fairly simple. New keys simply get added. If a key already exists in the old property, items in its value list overwrite items on the same position in the old property. A single hyphen ($-$) as a value list item serves as an “antivalue”; it removes the item at the corresponding position.
Some examples:
| base | @prop |
| new | @prop(a) |
| result | @prop(a) |
| base | @prop(a,b,c) |
| new | @prop(,-) |
| result | @prop(a,,c) |
| base | @prop(foo=a,b) |
| new | @prop(foo=A,,c;bar=1,2) |
| result | @prop(foo=A,b,c;bar=1,2) |
- NOTE
The above merge rules are part of NED, but the code that interprets properties may have special rules for certain properties. For example, the @unit property of parameters is not allowed to be overridden, and @display is merged with special although similar rules (see Chapter [8]).
3.12.4 Known Properties¶
Here is a list of known NED properties in OMNeT++, grouped by the place of their usage. Note that simulation models, such as the INET Framework, may define and use additional properties for their purposes.
File / package level properties:
- @namespace(<name>): Defines a namespace for the C++ classes of NED components in the file or package tree. See [3.3], [19.4.7].
Module, channel, submodule, and connection properties:
- @display(<string>): Determines the visual representation in graphical user interfaces like Qtenv. See [8.4].
- @class(<classname>): Together with @namespace, specifies the C++ class to be used for modules defined in the NED file. See [3.3], [19.4.7].
- @isNetwork: Marks a compound module as a network, making it a candidate for being the top-level module. See [19.4.3.2].
- @dynamic: Submodules declared dynamic will not be instantiated automatically; it is expected that they will be created at runtime by other modules. See [19.4.12.4].
- @signal[<signalname>](...): Declares a signal that can be emitted by modules of this type. See [4.14.2.3].
- @statistic[<name>](...): Defines a statistic, including its recording modes and possibly associated signals. See [4.15.2].
- @statisticTemplate[<name>](...): Defines a template for statistics set up programmatically. See [4.15.4].
- @figure[<name>](...): Defines a graphical element to be displayed in the graphical user interface. See [8.6.5].
- @defaultStatistic: Denotes the default statistic to be displayed on the module's axis in the Sequence Chart tool in the IDE.
Parameter properties:
- @unit(<string>): Specifies the measurement unit for a parameter, e.g., "s" for seconds. See [3.6.6].
- @prompt(<string>): Provides a user-friendly prompt string for input parameters, enhancing model usability. See [19.4.9.1].
- @mutable: Indicates that the value of a parameter can change during the simulation, supporting dynamic behavior in models. See [3.6.5], [19.4.9.3].
- @enum(<strings>): Defines a list of valid values for the parameter.
Gate properties:
- @directIn: Marks an input gate for receiving direct messages, bypassing the standard message passing mechanism. See [4.7.5], [19.4.11.1].
- @loose: Declares that the gate is not required to be connected in the connections section of the compound module. See [19.4.11.1].
- @labels(<strings>): Assigns a set of labels to the gate, which are used for matching gates to be connected in the graphical editor.
3.13 Inheritance¶
Inheritance support in the NED language is only briefly described here because several details and examples have already been presented in previous sections.
In NED, a type may only extend (extends keyword) an element of the same component type: a simple module may extend a simple module, a channel may extend a channel, a module interface may extend a module interface, and so on. However, there is one irregularity: a compound module may extend a simple module (and inherit its C++ class), but the reverse is not true.
Single inheritance is supported for modules and channels, and multiple inheritance is supported for module interfaces and channel interfaces. A network is a shorthand for a compound module with the @isNetwork property set, so the same rules apply to it as to compound modules.
However, a simple or compound module type may implement (like keyword) several module interfaces, and similarly, a channel type may implement several channel interfaces.
- IMPORTANT
When extending a simple module type both in NED and in C++, the @class property must be used to specify the new C++ class. Otherwise, the new module type will inherit the C++ class of the base!
Inheritance may:
- add new properties, parameters, gates, inner types, submodules, and connections, as long as the names do not conflict with inherited names
- modify inherited properties and properties of inherited parameters and gates
- not modify inherited submodules, connections, and inner types
For details and examples, refer to the corresponding sections of this chapter (simple modules [3.3], compound modules [3.4], channels [3.5], parameters [3.6], gates [3.7], submodules [3.8], connections [3.9], module interfaces and channel interfaces [3.11.1]).
3.14 Packages¶
Having all NED files in a single directory is fine for small simulation projects. When a project grows, however, it sooner or later becomes necessary to introduce a directory structure and sort the NED files into them. NED natively supports directory trees with NED files and calls directories packages. Packages are also useful for reducing name conflicts because names can be qualified with the package name.
- NOTE
NED packages are based on the Java package concept with minor enhancements. If you are familiar with Java, you'll find little surprise in this section.
3.14.1 Overview¶
When a simulation is run, one must tell the simulation kernel the directory which is the root of the package tree; let's call it NED source folder. The simulation kernel will traverse the whole directory tree and load all NED files from every directory. One can have several NED directory trees, and their roots (the NED source folders) should be given to the simulation kernel in the NED path variable. The NED path can be specified in several ways: as an environment variable (NEDPATH), as a configuration option (ned-path), or as a command-line option to the simulation runtime (-n). NEDPATH is described in detail in Chapter [11].
Directories in a NED source tree correspond to packages. If NED files are in the <root>/a/b/c directory (where <root> is listed in NED path), then the package name is a.b.c. The package name has to be explicitly declared at the top of the NED files as well, like this:
package a.b.c;
The package name that follows from the directory name and the declared package must match; it is an error if they don't. (The only exception is the root package.ned file, as described below.)
By convention, package names are all lowercase and begin with either the project name (myproject) or the reversed domain name plus the project name (org.example.myproject). The latter convention would cause the directory tree to begin with a few levels of empty directories, but this can be eliminated with a top-level package.ned.
NED files called package.ned have a special role, as they are meant to represent the whole package. For example, comments in package.ned are treated as documentation of the package. Also, a @namespace property in a package.ned file affects all NED files in that directory and all directories below.
The top-level package.ned file can be used to designate the root package, which is useful for eliminating a few levels of empty directories resulting from the package naming convention. For example, given a project where all NED types are under the org.acme.foosim package, one can eliminate the empty directory levels org, acme, and foosim by creating a package.ned file in the source root directory with the package declaration org.example.myproject. This will cause a directory foo under the root to be interpreted as package org.example.myproject.foo, and NED files in them must contain that as the package declaration. Only the root package.ned can define the package, package.ned files in subdirectories must follow it.
Let's look at the INET Framework as an example, which contains hundreds of NED files in several dozen packages. The directory structure looks like this:
INET/
src/
base/
transport/
tcp/
udp/
...
networklayer/
linklayer/
...
examples/
adhoc/
ethernet/
...
The src and examples subdirectories are denoted as NED source folders, so NEDPATH is the following (provided INET was unpacked in /home/joe):
/home/joe/INET/src;/home/joe/INET/examples
Both src and examples contain package.ned files to define the root package:
// INET/src/package.ned: package inet;
// INET/examples/package.ned: package inet.examples;
And other NED files follow the package defined in package.ned:
// INET/src/transport/tcp/TCP.ned: package inet.transport.tcp;
3.14.2 Name Resolution, Imports¶
We already mentioned that packages can be used to distinguish similarly named NED types. The name that includes the package name (a.b.c.Queue for a Queue module in the a.b.c package) is called a fully qualified name; without the package name (Queue) it is called a simple name.
Simple names alone are not enough to unambiguously identify a type. Here is how one can refer to an existing type:
- By fully qualified name. This is often cumbersome though, as names tend to be too long;
- Import the type, then the simple name will be enough;
- If the type is in the same package, then it doesn't need to be imported; it can be referred to by simple name
Types can be imported with the import keyword by either the fully qualified name or by a wildcard pattern. In wildcard patterns, one asterisk ("*") stands for “any character sequence not containing a period”, and two asterisks ("**") mean “any character sequence which may contain a period”.
So, any of the following lines can be used to import a type called inet.protocols.networklayer.ip.RoutingTable:
import inet.protocols.networklayer.ip.RoutingTable; import inet.protocols.networklayer.ip.*; import inet.protocols.networklayer.ip.Ro*Ta*; import inet.protocols.*.ip.*; import inet.**.RoutingTable;
If an import explicitly names a type with its exact fully qualified name, then that type must exist; otherwise, it is an error. Imports containing wildcards are more permissive; it is allowed for them not to match any existing NED type (although that might generate a warning).
Inner types may not be referred to outside their enclosing types, so they cannot be imported either.
3.14.3 Name Resolution With "like"¶
The situation is a little different for submodule and connection channel specifications using the like keyword, when the type name comes from a string-valued expression (see Section [3.11.1] about submodule and channel types as parameters). Imports are not much use here: at the time of writing the NED file, it is not yet known what NED types will be suitable for being “plugged in” there, so they cannot be imported in advance.
There is no problem with fully qualified names, but simple names need to be resolved differently. What NED does is this: it determines which interface the module or channel type must implement (i.e. ... like INode), and then collects the types that have the given simple name AND implement the given interface. There must be exactly one such type, which is then used. If there is none or there are more than one, it will be reported as an error.
Let us see the following example:
module MobileHost
{
parameters:
string mobilityType;
submodules:
mobility: <mobilityType> like IMobility;
...
}
and suppose that the following modules implement the IMobility module interface: inet.mobility.RandomWalk, inet.adhoc.RandomWalk, inet.mobility.MassMobility. Also, suppose that there is a type called inet.examples.adhoc.MassMobility, but it does not implement the interface.
So if mobilityType="MassMobility", then inet.mobility.MassMobility will be selected; the other MassMobility doesn't interfere. However, if mobilityType="RandomWalk", then it is an error because there are two matching RandomWalk types. Both RandomWalk's can still be used, but one must explicitly choose one of them by providing a package name: mobilityType="inet.adhoc.RandomWalk".
3.14.4 The Default Package¶
It is not mandatory to make use of packages: if all NED files are in a single directory listed on the NEDPATH, then package declarations (and imports) can be omitted. Those files are said to be in the default package.
4 Simple Modules¶
Simple modules are the active components in the model. Simple modules are programmed in C++, using the OMNeT++ class library. The following sections contain a brief introduction to discrete event simulation in general, explain how its concepts are implemented in OMNeT++, and give an overview and practical advice on how to design and code simple modules.
4.1 Simulation Concepts¶
This section contains a very brief introduction to how discrete event simulation (DES) works, in order to introduce terms we'll use when explaining OMNeT++ concepts and implementation.
4.1.1 Discrete Event Simulation¶
A discrete event system is a system where state changes (events) happen at discrete instances in time, and events take zero time to happen. It is assumed that nothing (i.e. nothing interesting) happens between two consecutive events, that is, no state change takes place in the system between the events. This is in contrast to continuous systems where state changes are continuous. Systems that can be viewed as discrete event systems can be modeled using discrete event simulation, DES.
For example, computer networks are usually viewed as discrete event systems. Some of the events are:
- start of a packet transmission
- end of a packet transmission
- expiry of a retransmission timeout
This implies that between two events such as start of a packet transmission and end of a packet transmission, nothing interesting happens. That is, the packet's state remains being transmitted. Note that the definition of “interesting” events and states always depends on the intent and purposes of the modeler. If we were interested in the transmission of individual bits, we would have included something like start of bit transmission and end of bit transmission among our events.
The time when events occur is often called event timestamp; with OMNeT++ we use the term arrival time (because in the class library, the word “timestamp” is reserved for a user-settable attribute in the event class). Time within the model is often called simulation time, model time , or virtual time, as opposed to real time or CPU time, which refer to how long the simulation program has been running and how much CPU time it has consumed.
4.1.2 The Event Loop¶
Discrete event simulation maintains the set of future events in a data structure often called FES (Future Event Set) or FEL (Future Event List). Such simulators usually work according to the following pseudocode:
initialize -- this includes building the model and
inserting initial events to FES
while (FES not empty and simulation not yet complete)
{
retrieve first event from FES
t:= timestamp of this event
process event
(processing may insert new events in FES or delete existing ones)
}
finish simulation (write statistical results, etc.)
The initialization step usually builds the data structures representing the simulation model, calls any user-defined initialization code, and inserts initial events into the FES to ensure that the simulation can start. Initialization strategies can differ considerably from one simulator to another.
The subsequent loop consumes events from the FES and processes them. Events are processed in strict timestamp order to maintain causality, that is, to ensure that no current event may have an effect on earlier events.
Processing an event involves calls to user-supplied code. For example, using the computer network simulation example, processing a “timeout expired” event may consist of re-sending a copy of the network packet, updating the retry count, scheduling another “timeout” event, and so on. The user code may also remove events from the FES, for example, when canceling timeouts.
The simulation stops when there are no events left (this rarely happens in practice) or when it isn't necessary for the simulation to run further because the model time or the CPU time has reached a given limit, or because the statistics have reached the desired accuracy. At this time, before the program exits, the user will typically want to record statistics into output files.
4.1.3 Events and Event Execution Order in OMNeT++¶
OMNeT++ uses messages to represent
events.
- [For all practical purposes. Note that there
is a class called cEvent that cMessage subclasses from,
but it is only used internally to the simulation kernel.]
Events are consumed from the FES in arrival time order, to maintain causality. More precisely, given two messages, the following rules apply:
- The message with the earlier arrival time is executed first. If arrival times are equal,
- the one with the higher scheduling priority (smaller numeric value) is executed first. If priorities are the same,
- the one scheduled/sent earlier is executed first.
Scheduling priority is a user-assigned integer attribute of messages.
4.1.4 Simulation Time¶
The current simulation time can be obtained with the simTime() function.
Simulation time in OMNeT++ is represented by the C++ type simtime_t, which is by default a typedef to the SimTime class. SimTime class stores simulation time in a 64-bit integer, using decimal fixed-point representation. The resolution is controlled by the scale exponent global configuration variable; that is, SimTime instances have the same resolution. The exponent can be chosen between -18 (attosecond resolution) and 0 (seconds). Some exponents with the ranges they provide are shown in the following table.
| Exponent | Resolution | Approx. Range |
| -18 | 10-18s (1 as) | +/- 9.22s |
| -15 | 10-15s (1 fs) | +/- 153.72 minutes |
| -12 | 10-12s (1 ps) | +/- 106.75 days |
| -9 | 10-9s (1 ns) | +/- 292.27 years |
| -6 | 10-6s (1 us) | +/- 292271 years |
| -3 | 10-3s (1 ms) | +/- 2.9227e8 years |
| 0 | 1s | +/- 2.9227e11 years |
Note that although simulation time cannot be negative, it is still useful to be able to represent negative numbers because they often arise during the evaluation of arithmetic expressions.
There is no implicit conversion from SimTime to double, mostly because it would conflict with overloaded arithmetic operations of SimTime; use the dbl() method of SimTime or the SIMTIME_DBL() macro to convert. To reduce the need for dbl(), several functions and methods have overloaded variants that directly accept SimTime, for example, fabs(), fmod(), div(), ceil(), floor(), uniform(), exponential(), and normal().
Other useful methods of SimTime include str(), which returns the value as a string; parse(), which converts a string to SimTime; raw(), which returns the underlying 64-bit integer; getScaleExp(), which returns the global scale exponent; isZero(), which tests whether the simulation time is 0; and getMaxTime(), which returns the maximum simulation time that can be represented at the current scale exponent. Zero and the maximum simulation time are also accessible via the SIMTIME_ZERO and SIMTIME_MAX macros.
// 340 microseconds in the future, truncated to the millisecond boundary simtime_t timeout = (simTime() + SimTime(340, SIMTIME_US)).trunc(SIMTIME_MS);
- NOTE
Converting a SimTime to double may lose precision because double only has a 52-bit mantissa. Earlier versions of OMNeT++ used double for the simulation time, but that caused problems in long simulations that relied on fine-grained timing, for example, MAC protocols. Other problems were the accumulation of rounding errors, and non-associativity (often (x+y)+z != x+(y+z), see ~[Goldberg91what]) which meant that two double simulation times could not be reliably compared for equality.
4.1.5 FES Implementation¶
The implementation of the FES is a crucial factor in the performance of a discrete event simulator. In OMNeT++, the FES is replaceable, and the default FES implementation uses binary heap as the data structure. Binary heap is generally considered to be the best FES algorithm for discrete event simulation as it provides a good, balanced performance for most workloads. (Exotic data structures like skiplist may perform better than heap in some cases.)
4.2 Components, Simple Modules, Channels¶
OMNeT++ simulation models are composed of modules and connections. Modules may be simple (atomic) modules or compound modules; simple modules are the active components in a model, and their behavior is defined by the user as C++ code. Connections may have associated channel objects. Channel objects encapsulate channel behavior: propagation and transmission time modeling, error modeling, and possibly others. Channels are also programmable in C++ by the user.
Modules and channels are represented with the cModule and cChannel classes, respectively. cModule and cChannel are both derived from the cComponent class.
The user defines simple module types by subclassing cSimpleModule. Compound modules are instantiated with cModule, although the user can override it with @class in the NED file, and can even use a simple module C++ class (i.e. one derived from cSimpleModule) for a compound module.
The cChannel's subclasses include the three built-in channel types: cIdealChannel, cDelayChannel, and cDatarateChannel. The user can create new channel types by subclassing cChannel or any other channel class.
The following inheritance diagram illustrates the relationship of the classes mentioned above.

Simple modules and channels can be programmed by redefining certain member functions and providing your own code in them. Some of those member functions are declared on cComponent, the common base class of channels and modules.
cComponent has the following member functions meant for redefining in subclasses:
- initialize(). This method is invoked after OMNeT++ has set up the network (i.e., created modules and connected them according to the definitions) and provides a place for initialization code.
- finish() is called when the simulation has terminated successfully, and it is recommended to use it for recording summary statistics.
initialize() and finish(), together with initialize()'s variants for multi-stage initialization, will be covered in detail in section [4.3.3].
In OMNeT++, events occur inside simple modules. Simple modules encapsulate C++ code that generates events and reacts to events, implementing the behavior of the module.
To define the dynamic behavior of a simple module, one of the following member functions needs to be overridden:
- handleMessage(cMessage *msg). It is invoked with the message as a parameter whenever the module receives a message. handleMessage() is expected to process the message and then return. Simulation time never elapses inside handleMessage() calls, only between them.
- activity() is started as a coroutine
- [Cooperatively
scheduled thread, explained later.]
Modules written with activity() and handleMessage() can be freely mixed within a simulation model. Generally, handleMessage() should be preferred to activity(), due to scalability and other practical reasons. The two functions will be described in detail in sections [4.4.1] and [4.4.2], including their advantages and disadvantages.
The behavior of channels can also be modified by redefining member functions. However, the channel API is slightly more complicated than that of simple modules, so we'll describe it in a later section ([4.8]).
Last, let us mention refreshDisplay(), which is related to updating the visual appearance of the simulation when run under a graphical user interface. refreshDisplay() is covered in the chapter that deals with simulation visualization ([8.2]).
- NOTE
refreshDisplay() has been added in OMNeT++ 5.0. Until then, visualization-related tasks were usually implemented as part of handleMessage(). refreshDisplay() provides a far superior and more efficient solution.
4.3 Defining Simple Module Types¶
4.3.1 Overview¶
As mentioned before, a simple module is nothing more than a C++ class which needs to be subclassed from cSimpleModule, with one or more virtual member functions redefined to define its behavior.
The class needs to be registered with OMNeT++ via the Define_Module() macro. The Define_Module() line should always be placed in .cc or .cpp files and not in the header file (.h), because the compiler generates code from it.
The following HelloModule is one of the simplest simple modules that can be written. (We could have omitted the initialize() method as well to make it even smaller, but then how would it say Hello?) Note the use of cSimpleModule as the base class, and the Define_Module() line.
// file: HelloModule.cc
#include <omnetpp.h>
using namespace omnetpp;
class HelloModule : public cSimpleModule
{
protected:
virtual void initialize();
virtual void handleMessage(cMessage *msg);
};
// register module class with {\opp}
Define_Module(HelloModule);
void HelloModule::initialize()
{
EV << "Hello World!\n";
}
void HelloModule::handleMessage(cMessage *msg)
{
delete msg; // just discard everything we receive
}
In order to refer to this simple module type in NED files, an associated NED declaration is also needed, which might look like this:
// file: HelloModule.ned
simple HelloModule
{
gates:
input in;
}
4.3.2 Constructor¶
Simple modules are never directly instantiated by the user, but rather by the simulation kernel. This means that arbitrary constructors cannot be used: the signature must be what is expected by the simulation kernel. Luckily, this contract is very simple: the constructor must be public and must take no arguments:
public:
HelloModule(); // constructor takes no arguments
cSimpleModule itself has two constructors:
- cSimpleModule() -- constructor without arguments
- cSimpleModule(size_t stacksize) -- constructor that accepts the coroutine stack size
The first version should be used with handleMessage() simple modules, and the second one with activity() modules. (With the latter, the activity() method of the module class runs as a coroutine that needs a separate CPU stack, usually of 16..32K. This will be discussed in detail later.) Passing zero stack size to the latter constructor also selects handleMessage().
Therefore, the following constructor definitions are all correct and select handleMessage() to be used with the module:
HelloModule::HelloModule() {...}
HelloModule::HelloModule() : cSimpleModule() {...}
It is also correct to omit the constructor altogether, because the compiler-generated one is suitable too.
The following constructor definition selects activity() to be used with the module, with 16K of coroutine stack:
HelloModule::HelloModule() : cSimpleModule(16384) {...}
4.3.3 Initialization and Finalization¶
4.3.3.1 Basic Usage¶
The initialize() and finish() methods are declared as part of cComponent and provide the user with the opportunity to run code at the beginning and successful termination of the simulation.
The reason initialize() exists is that simulation-related code cannot usually be placed in the simple module's constructor, because the simulation model is still being set up when the constructor runs, and many required objects are not yet available. In contrast, initialize() is called just before the simulation starts executing, when everything else has already been set up.
finish() is used for recording statistics and is only called when the simulation has terminated normally. It does not get called when the simulation stops with an error message. The destructor always gets called at the end, regardless of how the simulation stopped, but at that time it is reasonable to assume that the simulation model has already been partly destroyed.
Based on the above considerations, the following conventions exist for these four methods:
- Constructor:
Set pointer members of the module class to nullptr; postpone all other initialization tasks to initialize().
- initialize():
Perform all initialization tasks: read module parameters, initialize class variables, allocate dynamic data structures with new, and allocate and initialize self-messages (timers) if needed.
- finish():
Record statistics. Do not delete anything or cancel timers -- all cleanup must be done in the destructor.
- Destructor:
Delete everything that was allocated by new and is still held by the module class. When deleting self-messages (timers), use the cancelAndDelete(msg) function! It is usually incorrect to simply delete a self-message from the destructor, because it might be in the scheduled events list. The cancelAndDelete(msg) function first checks for that and cancels the message before deletion if necessary.
OMNeT++ prints the list of unreleased objects at the end of the simulation. When a simulation model displays "undisposed object ..." messages, it indicates that the corresponding module destructors need to be fixed. As a temporary measure, these messages can be hidden by setting print-undisposed=false in the configuration.
- NOTE
The perform-gc configuration option has been removed in OMNeT++ 4.0. Automatic garbage collection cannot be reliably implemented due to the limitations of the C++ language.
4.3.3.2 Invocation Order¶
The initialize() functions of the modules are invoked before the first event is processed, but after the initial events (starter messages) have been placed into the FES by the simulation kernel.
Both simple and compound modules have initialize() functions. The initialize() function of a compound module runs before that of its submodules.
The finish() functions are called when the event loop has terminated, but only if it terminated normally.
- NOTE
finish() is not called if the simulation has terminated with a runtime error.
The calling order for finish() is the reverse of the order of
initialize(): first the submodules, then the encompassing compound module.
- [To provide an initialize() function for a compound module,
cModule needs to be subclassed, and the new class needs to be used
for the compound module by adding the @class(<classname>) property to the NED declaration.]
The following pseudocode summarizes this:
perform simulation run:
build network
(i.e., create the system module and its submodules recursively)
insert starter messages for all submodules using activity()
do callInitialize() on the system module
enter event loop // (described earlier)
if (event loop terminated normally) // i.e., no errors
do callFinish() on the system module
clean up
callInitialize()
{
call to user-defined initialize() function
if (module is compound)
for (each submodule)
do callInitialize() on the submodule
}
callFinish()
{
if (module is compound)
for (each submodule)
do callFinish() on the submodule
call to user-defined finish() function
}
Keep in mind that finish() is not always called, so it is not a suitable place for cleanup code that should run every time the module is deleted. finish() is only appropriate for writing statistics, result post-processing, and other operations that are intended to run only on successful completion. Cleanup code should be placed in the destructor.
4.3.3.3 Multi-Stage Initialization¶
In simulation models where one-stage initialization provided by initialize() is insufficient, multi-stage initialization can be used. Modules have two functions that can be redefined by the user:
virtual void initialize(int stage); virtual int numInitStages() const;
The initialization of modules is orchestrated in stages. It starts with the call to initialize(0) for every module, initiating the first setup stage. Once this is completed across all modules, the system proceeds to the next steps, initialize(1), initialize(2), and so on, effectively allowing modules to undergo additional configuration in a controlled, sequential order.
To effectively manage this sequential setup, each module must declare how many
initial stages it requires by overriding the numInitStages() function.
For instance, if a module needs two phases of setup, this function should return
2. Subsequently, the module must also tailor the C++ $2initialize(int
stage) function to specify the operations that occur at each stage, such as
handling specific setups at stage=0 and stage=1. This
organized approach to initialization ensures that each module is systematically
readied according to its operational needs within the broader simulation
context.
- [Note the const in the numInitStages() declaration.
If you forget it, a different function is created instead of
redefining the existing one in the base class, so the existing function
remains in effect and returns 1.]
The callInitialize() function performs the full multi-stage initialization for the module and all its submodules.
If the multi-stage initialization functions are not redefined, the default behavior is single-stage initialization: the default numInitStages() returns 1, and the default initialize(int stage) simply calls initialize().
4.4 Adding Functionality to cSimpleModule¶
This section discusses cSimpleModule's previously mentioned handleMessage() and activity() member functions, which are intended to be redefined by the user.
4.4.1 handleMessage()¶
4.4.1.1 Function Called for Each Event¶
The idea is that at each event (message arrival), we simply call a user-defined function. This function, handleMessage(cMessage *msg), is a virtual member function of cSimpleModule which does nothing by default -- the user has to redefine it in subclasses and add the message processing code.
The handleMessage() function will be called for every message that arrives at the module. The function should process the message and return immediately after that. The simulation time is potentially different in each call. No simulation time elapses within a call to handleMessage().
The event loop inside the simulator handles both activity() and handleMessage() simple modules, and it corresponds to the following pseudocode:
while (FES not empty and simulation not yet complete)
{
retrieve first event from FES
t:= timestamp of this event
m:= module containing this event
if (m works with handleMessage())
m->handleMessage( event )
else // m works with activity()
transferTo( m )
}
Modules with handleMessage() are NOT started automatically: the simulation kernel creates starter messages only for modules with activity(). This means that you have to schedule self-messages from the initialize() function if you want a handleMessage() simple module to start working “by itself”, without first receiving a message from other modules.
4.4.1.2 Programming with handleMessage()¶
To use the handleMessage() mechanism in a simple module, you must specify zero stack size for the module. This is important because this tells OMNeT++ that you want to use handleMessage(), not activity().
Message/event related functions you can use in handleMessage():
- send() family of functions -- to send messages to other modules
- scheduleAt() -- to schedule an event (the module “sends a message to itself”)
- cancelEvent() -- to delete an event scheduled with scheduleAt()
The receive() and wait() functions cannot be used in handleMessage() because they are coroutine-based by nature, as explained in the section about activity().
You have to add data members to the module class for every piece of information you want to preserve. This information cannot be stored in local variables of handleMessage() because they are destroyed when the function returns. Also, they cannot be stored in static variables in the function (or the class) because they would be shared between all instances of the class.
Data members to be added to the module class will typically include things like:
- state (e.g. IDLE/BUSY, CONN_DOWN/CONN_ALIVE/...)
- other variables which belong to the state of the module: retry counts, packet queues, etc.
- values retrieved/computed once and then stored: values of module parameters, gate indices, routing information, etc.
- pointers of message objects created once and then reused for timers, timeouts, etc.
- variables/objects for statistics collection
These variables are often initialized from the initialize() method because the information needed to obtain the initial value (e.g. module parameters) may not yet be available at the time the module constructor runs.
Another task to be done in initialize() is to schedule initial event(s) which trigger the first call(s) to handleMessage(). After the first call, handleMessage() must take care to schedule further events for itself so that the “chain” is not broken. Scheduling events is not necessary if your module only has to react to messages coming from other modules.
finish() is normally used to record statistics information accumulated in data members of the class at the end of the simulation.
4.4.1.3 Application Area¶
handleMessage() is in most cases a better choice than activity():
- When you expect the module to be used in large simulations involving several thousand modules. In such cases, the module stacks required by activity() would simply consume too much memory.
- For modules that maintain little or no state information, such as packet sinks, handleMessage() is more convenient to program.
- Other good candidates are modules with a large state space and many arbitrary state transition possibilities (i.e. where there are many possible subsequent states for any state). Such algorithms are difficult to program with activity() and better suited for handleMessage() (see rule of thumb below). This is the case for most communication protocols.
4.4.1.4 Example 1: Protocol Models¶
Models of protocol layers in a communication network tend to have a common structure on a high level because fundamentally they all have to react to three types of events: messages arriving from higher layer protocols (or apps), messages arriving from lower layer protocols (from the network), and various timers and timeouts (self-messages).
This usually results in the following source code pattern:
class FooProtocol : public cSimpleModule
{
protected:
// state variables
// ...
virtual void processMsgFromHigherLayer(cMessage *packet);
virtual void processMsgFromLowerLayer(FooPacket *packet);
virtual void processTimer(cMessage *timer);
virtual void initialize();
virtual void handleMessage(cMessage *msg);
};
// ...
void FooProtocol::handleMessage(cMessage *msg)
{
if (msg->isSelfMessage())
processTimer(msg);
else if (msg->arrivedOn("fromNetw"))
processMsgFromLowerLayer(check_and_cast<FooPacket *>(msg));
else
processMsgFromHigherLayer(msg);
}
The functions processMsgFromHigherLayer(), processMsgFromLowerLayer(), and processTimer() are then usually split further: there are separate methods to process separate packet types and separate timers.
4.4.1.5 Example 2: Simple Traffic Generators and Sinks¶
The code for simple packet generators and sinks programmed with handleMessage() might be as simple as the following pseudocode:
PacketGenerator::handleMessage(msg)
{
create and send out a new packet;
schedule msg again to trigger next call to handleMessage;
}
PacketSink::handleMessage(msg)
{
delete msg;
}
Note that PacketGenerator will need to redefine initialize() to create m and schedule the first event.
The following simple module generates packets with exponential inter-arrival time. (Some details in the source haven't been discussed yet, but the code is probably understandable nevertheless.)
class Generator : public cSimpleModule
{
public:
Generator() : cSimpleModule() {}
protected:
virtual void initialize();
virtual void handleMessage(cMessage *msg);
};
Define_Module(Generator);
void Generator::initialize()
{
// schedule first sending
scheduleAt(simTime(), new cMessage);
}
void Generator::handleMessage(cMessage *msg)
{
// generate & send packet
cMessage *pkt = new cMessage;
send(pkt, "out");
// schedule next call
scheduleAt(simTime()+exponential(1.0), msg);
}
4.4.1.6 Example 3: Bursty Traffic Generator¶
A bit more realistic example is to rewrite our Generator to create packet bursts, each consisting of burstLength packets.
We add some data members to the class:
- burstLength will store the parameter that specifies how many packets a burst must contain,
- burstCounter will count how many packets are left to be sent in the current burst.
The code:
class BurstyGenerator : public cSimpleModule
{
protected:
int burstLength;
int burstCounter;
virtual void initialize();
virtual void handleMessage(cMessage *msg);
};
Define_Module(BurstyGenerator);
void BurstyGenerator::initialize()
{
// init parameters and state variables
burstLength = par("burstLength");
burstCounter = burstLength;
// schedule first packet of first burst
scheduleAt(simTime(), new cMessage);
}
void BurstyGenerator::handleMessage(cMessage *msg)
{
// generate & send packet
cMessage *pkt = new cMessage;
send(pkt, "out");
// if this was the last packet of the burst
if (--burstCounter == 0) {
// schedule next burst
burstCounter = burstLength;
scheduleAt(simTime()+exponential(5.0), msg);
}
else {
// schedule next sending within burst
scheduleAt(simTime()+exponential(1.0), msg);
}
}
4.4.1.7 Pros and Cons of Using handleMessage()¶
Pros:
- consumes less memory: no separate stack needed for simple modules
- fast: function call is faster than switching between coroutines
Cons:
- local variables cannot be used to store state information
- need to redefine initialize()
Usually, handleMessage() should be preferred over activity().
4.4.2 activity()¶
4.4.2.1 Process-Style Description¶
With activity(), a simple module can be coded much like an operating system process or thread. One can wait for an incoming message (event) at any point in the code, suspend the execution for some time (model time!), etc. When the activity() function exits, the module is terminated (the simulation can continue if there are other modules that can run).
The most important functions that can be used in activity() are (they will be discussed in detail later):
- receive() -- to receive messages (events)
- wait() -- to suspend execution for some time (model time)
- send() family of functions -- to send messages to other modules
- scheduleAt() -- to schedule an event (the module "sends a message to itself")
- cancelEvent() -- to delete an event scheduled with scheduleAt()
- end() -- to finish execution of this module (same as exiting the activity() function)
The activity() function normally contains an infinite loop, with at least a wait() or receive() call in its body.
4.4.2.2 Application Area¶
In general, you should prefer handleMessage() to activity(). The main problem with activity() is that it does not scale because every module needs a separate coroutine stack. It has also been observed that activity() does not encourage good programming style, and stack switching can confuse many debuggers.
There is one scenario where activity()'s process-style description is convenient: when the process has many states, but transitions are very limited, i.e., from any state the process can only go to one or two other states. For example, this is the case when programming a network application that uses a single network connection. The pseudocode of the application, which talks to a transport layer protocol, might look like this:
activity()
{
while(true)
{
open the connection by sending OPEN command to the transport layer
receive the reply from the transport layer
if (the open is not successful)
{
wait(some time)
continue // loop back to while()
}
while (there is more to do)
{
send data on the network connection
if (the connection is broken)
{
continue outer loop // loop back to the outer while()
}
wait(some time)
receive data on the network connection
if (the connection is broken)
{
continue outer loop // loop back to the outer while()
}
wait(some time)
}
close the connection by sending CLOSE command to the transport layer
if (the close is not successful)
{
// handle error
}
wait(some time)
}
}
If there is a need to handle several connections concurrently, dynamically creating simple modules to handle each is an option. Dynamic module creation will be discussed later.
There are situations when you certainly do not want to use activity(). If the activity() function contains no wait() and has only one receive() at the top of a message handling loop, there is no point in using activity(), and the code should be written with handleMessage(). The body of the loop would then become the body of handleMessage(), state variables inside activity() would become data members in the module class, and they would be initialized in initialize().
For example, a Sink implementation:
void Sink::activity()
{
while(true) {
msg = receive();
delete msg;
}
}
should rather be programmed as:
void Sink::handleMessage(cMessage *msg)
{
delete msg;
}
4.4.2.3 activity() Is Run as a Coroutine¶
activity() runs as a coroutine. Coroutines are similar to threads, but are scheduled non-preemptively (this is also called cooperative multitasking). One can switch from one coroutine to another by a transferTo(otherCoroutine) call, causing the first coroutine to be suspended and the second one to run. Later, when the second coroutine performs a transferTo(firstCoroutine) call to the first one, the execution of the first coroutine resumes from the point of the transferTo(otherCoroutine) call. The full state of the coroutine, including local variables, is preserved while the thread of execution is in other coroutines. This implies that each coroutine has its own CPU stack, and transferTo() involves switching from one CPU stack to another.
Coroutines are at the heart of OMNeT++, and the simulation programmer doesn't ever need to call transferTo() or other functions in the coroutine library, nor does the programmer need to care about the coroutine library implementation. It is important to understand, however, how the event loop works with coroutines.
When using coroutines, the event loop looks like this (simplified):
while (FES not empty and simulation not yet complete)
{
retrieve the first event from FES
t:= the timestamp of this event
m:= the module containing this event
if (m works with handleMessage())
m->handleMessage(event)
else // m works with activity()
transferTo(m)
}
That is, when a module has an event, the simulation kernel transfers control to the module's coroutine. It is expected that when the module “decides it has finished processing the event”, it will transfer control back to the simulation kernel by a transferTo(main) call. Initially, simple modules using activity() are booted by events (starter messages) inserted into the FES by the simulation kernel before the start of the simulation.
How does the coroutine know it has “finished processing the event”? The answer: when it requests another event. The functions that request events from the simulation kernel are receive() and wait(), so their implementations contain a transferTo(main) call somewhere.
Their pseudocode, as implemented in OMNeT++, is:
receive()
{
transferTo(main)
retrieve the current event
return the event // remember: events = messages
}
wait()
{
create the event e
schedule it at (current simulation time + wait interval)
transferTo(main)
retrieve the current event
if (the current event is not e) {
error
}
delete e // note: actual implementation reuses events
return
}
Thus, the receive() and wait() calls are special points in the activity() function because they are where
- simulation time elapses in the module, and
- other modules get a chance to execute.
4.4.2.4 Starter Messages¶
Modules written with activity() need starter messages to “boot”. These starter messages are inserted into the FES automatically by OMNeT++ at the beginning of the simulation, even before the initialize() functions are called.
4.4.2.5 Coroutine Stack Size¶
The simulation programmer needs to define the CPU stack size for coroutines. This cannot be automated.
16 or 32 kbytes is usually a good choice, but more space may be needed if the module uses recursive functions or has many/large local variables. OMNeT++ has a built-in mechanism that usually detects if the module stack is too small and overflows. OMNeT++ can also report how much stack space a module actually uses at runtime.
4.4.2.6 initialize() and finish() with activity()¶
Because local variables of activity() are preserved across events, you can store everything (state information, packet buffers, etc.) in them. Local variables can be initialized at the top of the activity() function, so there isn't much need to use initialize().
You do need finish() if you want to write statistics at the end of the simulation. Because finish() cannot access the local variables of activity(), you have to put the variables and objects containing the statistics into the module class. You still don't need initialize() because class members can also be initialized at the top of activity().
A typical setup looks like this in pseudocode:
class MySimpleModule...
{
...
variables for statistics collection
activity();
finish();
};
MySimpleModule::activity()
{
declare local variables and initialize them
initialize statistics collection variables
while(true)
{
...
}
}
MySimpleModule::finish()
{
record statistics into file
}
4.4.2.7 Pros and Cons of Using activity()¶
Pros:
- initialize() not needed; state can be stored in local variables of activity()
- process-style description is a natural programming model in some cases
Cons:
- limited scalability: coroutine stacks can unacceptably increase the memory requirements of the simulation program if there are many activity()-based simple modules;
- run-time overhead: switching between coroutines is slower than a simple function call
- does not encourage good programming style: as module complexity grows, activity() tends to become a large, monolithic function.
In most cases, cons outweigh pros, and it is a better idea to use handleMessage() instead.
4.4.3 Use Modules Instead of Global Variables¶
If possible, avoid using global variables, including static class members. They are prone to causing several problems. First, they are not reset to their initial values (to zero) when you rebuild the simulation in Qtenv or start another run in Cmdenv. This may produce surprising results. Second, they prevent you from parallelizing the simulation. When using parallel simulation, each partition of the model runs in a separate process, having its own copies of global variables. This is usually not what you want.
The solution is to encapsulate the variables into simple modules as private or protected data members and expose them via public methods. Other modules can then call these public methods to get or set the values. Calling methods of other modules will be discussed in section [4.12]. Examples of such modules are InterfaceTable and RoutingTable in the INET Framework.
4.4.4 Reusing Module Code via Subclassing¶
The code of simple modules can be reused via subclassing and redefining virtual member functions. For example:
class TransportProtocolExt : public TransportProtocol
{
protected:
virtual void recalculateTimeout();
};
Define_Module(TransportProtocolExt);
void TransportProtocolExt::recalculateTimeout()
{
//...
}
The corresponding NED declaration:
simple TransportProtocolExt extends TransportProtocol
{
@class(TransportProtocolExt); // Important!
}
- NOTE
Note the @class() property, which tells OMNeT++ to use the TransportProtocolExt C++ class for the module type! It is needed because NED inheritance is NED inheritance only, so without @class() the TransportProtocolExt NED type would inherit the C++ class from its base NED type.
4.5 Accessing Module Parameters¶
Module parameters declared in NED files are represented with the cPar class at runtime and can be accessed by calling the par() member function of cComponent:
cPar& delayPar = par("delay");
4.5.1 Reading the Value¶
The value in a cPar object can be read with methods that correspond to the parameter's NED type: boolValue(), intValue(), doubleValue(), stringValue()/stdstringValue(), objectValue(), xmlValue(). There are also overloaded typecast operators for the corresponding types (bool, integer types including int and long, double, const char *, cObject*, and cXMLElement*).
long numJobs = par("numJobs").intValue();
double processingDelay = par("processingDelay"); // using operator double()
Note that cPar has two methods for returning a string value: stringValue(), which returns const char *, and stdstringValue(), which returns std::string. For volatile parameters, only stdstringValue() may be used, but otherwise the two are interchangeable.
If you use the par("foo") parameter in expressions (such as 4*par("foo")+2), the C++ compiler may be unable to decide between overloaded operators and report ambiguity. This issue can be resolved by adding an explicit cast such as (double)par("foo"), or using the doubleValue() or intValue() methods.
4.5.2 Volatile versus Non-Volatile Parameters¶
Volatile parameters in OMNeT++ are designed to provide dynamic values that are recalculated every time they are accessed. This feature is particularly useful for simulations requiring variability and unpredictability in parameter values.
Parameters can be declared volatile by marking them with the volatile keyword in the NED file. When a parameter is marked as volatile, that indicates that reading the parameter's value will cause a re-evaluation of the NED expression, which, due to possible calls to the random number generator, may yield a different value each time. Consequently, within the model code, it is essential to re-fetch the parameter's value each time it is required during simulation. In other words, simply reading the parameter once in the initialize() function and storing that value for subsequent use is incorrect.
Volatile parameters are often used to allow stochastic input, such as random packet generation intervals specified e.g. as exponential(1.0) (numbers drawn from the exponential distribution with mean 1.0).
Note that non-volatile NED parameters behave differently: reading their values multiple times is guaranteed to yield the same value every time. For non-volatile parameters, the NED expression is evaluated only once and the result is stored, so all reads will yield the same value. When a non-volatile parameter is assigned an expression like exponential(1.0), multiple reads will yield the same randomly chosen value.
The typical usage for non-volatile parameters is to read them in the initialize() method of the module class and store the values in class variables for easy access later:
class Source : public cSimpleModule
{
protected:
long numJobs;
virtual void initialize();
...
};
void Source::initialize()
{
numJobs = par("numJobs");
...
}
volatile parameters need to be re-read every time the value is needed. For example, a parameter that represents a random packet generation interval may be used like this:
void Source::handleMessage(cMessage *msg)
{
...
scheduleAt(simTime() + par("interval").doubleValue(), timerMsg);
...
}
This code looks up the parameter by name every time. This lookup can be avoided by storing the parameter object's pointer in a class variable, resulting in the following code:
class Source : public cSimpleModule
{
protected:
cPar *intervalp;
virtual void initialize();
virtual void handleMessage(cMessage *msg);
...
};
void Source::initialize()
{
intervalp = &par("interval");
...
}
void Source::handleMessage(cMessage *msg)
{
...
scheduleAt(simTime() + intervalp->doubleValue(), timerMsg);
...
}
4.5.3 Object Parameters¶
Parameters declared with the type object in NED can be accessed with the objectValue() method of cPar. It returns a pointer of the type cObject*, which then must be cast to the appropriate type using check_and_cast() or dynamic_cast().
For example, if a module has a parameter declared as follows:
object packetToSend;
Then one can access this object parameter in C++ with the following line:
cPacket *packet = check_and_cast<cPacket*>(par("packetToSend").objectValue());
Object parameters allow for JSON-style parameters and many interesting use cases. These use cases, along with real-life examples, were presented in the NED chapter, section [3.6.8].
4.5.4 JSON-Style Parameters¶
In OMNeT++, JSON-style parameters introduced in version 6.0 offer a flexible way to pass structured data to simulation modules. The NED expression syntax was extended with JSON-like list and map (dictionary) syntaxes, which allows the user to express data structures as JSON.
These data structures appear in C++ as object trees, with lists represented by
the cValueArray class, and dictionaries represented by the
cValueMap class. Values inside cValueArray and
cValueMap are stored in cValue instances. When a single value
is assigned to an object parameter, it is represented as a cValue
wrapped in a cValueHolder.
- [Object parameters were introduced
in version 6.0 of OMNeT++. In earlier versions, string parameters were often used
to emulate arrays and were parsed with the help of the cStringTokenizer
class and its convenience methods, such as asIntVector() and
asDoubleVector().]
To query and process JSON-style parameters in your module's C++ code, particularly within the initialize() method, you would retrieve the object using the par() and objectValue() methods, cast them to the appropriate type, then use the methods provided by the above classes to access the structured data.
Let us see an example. Consider a module that needs to process a routing table defined as a JSON-style parameter. The routing table is an array of route objects, each specifying dest, netmask, interf, and metric.
In the module's NED file, we define the parameter as follows:
object routes;
We assign the routes in the ini file:
**.routes = [
{dest: "10.0.0.0", netmask: "255.255.0.0", interf: "eth0", metric: 10},
{dest: "10.1.0.0", netmask: "255.255.0.0", interf: "eth1", metric: 20},
// Additional routes...
]
In the module's initialize() method, you can process this parameter as follows:
#include <omnetpp.h>
#include <vector>
#include <map>
#include <string>
using namespace omnetpp;
class RoutingModule : public cSimpleModule {
protected:
virtual void initialize() override {
// Access the parameter
cValueArray *routesArray = check_and_cast<cValueArray*>(par("routes").objectValue());
// Iterate over the array
for (int i = 0; i < routesArray->size(); ++i) {
cValueMap *route = check_and_cast<cValueMap*>(&(routesArray->get(i)));
// Extract route information
std::string dest = (*route)["dest"].stringValue();
std::string netmask = (*route)["netmask"].stringValue();
std::string interf = (*route)["interf"].stringValue();
int metric = (*route)["metric"].intValue();
// Process the route (example: add to internal routing table)
addRoute(dest, netmask, interf, metric);
}
}
void addRoute(const std::string& dest, const std::string& netmask,
const std::string& interf, int metric) {
// Implementation of route addition to the internal routing table
}
};
This example demonstrates how to access a JSON-style parameter (routes), iterate over its elements (routes), and extract and use the data in the simulation module's logic. The use of cValueMap and cValueArray classes makes handling structured data straightforward, resembling the process of working with JSON in high-level programming languages.
Note that volatile object parameters yield a new object instance every time the parameter is accessed.
4.5.5 Changing a Parameter's Value¶
Parameter values can be changed from the program during execution. This is rarely needed but may be useful for some scenarios.
- NOTE
The parameter's type cannot be changed at runtime -- it must remain the type declared in the NED file. It is also not possible to add or remove module parameters at runtime.
The methods to set the parameter value are setBoolValue(), setLongValue(), setStringValue(), setDoubleValue(), setObjectValue(), setXMLValue(). There are also overloaded assignment operators for various types including bool, int, long, double, const char *, cObject*, and cXMLElement*.
To allow a module to be notified about parameter changes, override its handleParameterChange() method, see [4.5.7].
4.5.6 Further cPar Methods¶
The parameter's name and type are returned by the getName() and getType() methods. The latter returns a value from an enum that can be converted to a readable string with the getTypeName() static method. The enum values are BOOL, DOUBLE, INT, STRING, OBJECT, and XML, and since the enum is an inner type, they usually have to be qualified with cPar::.
isVolatile() returns whether the parameter was declared volatile in the NED file. isNumeric() returns true if the parameter type is double or long.
The str() method returns the parameter's value in a string form. If the parameter contains an expression, then the string representation of the expression is returned.
An example usage of the above methods:
int n = getNumParams();
for (int i = 0; i < n; i++)
{
cPar& p = par(i);
EV << "parameter: " << p.getName() << "\n";
EV << " type:" << cPar::getTypeName(p.getType()) << "\n";
EV << " contains:" << p.str() << "\n";
}
The NED properties of a parameter can be accessed with the getProperties() method that returns a pointer to the cProperties object that stores the properties of this parameter. Specifically, getUnit() returns the unit of measurement associated with the parameter (@unit property in NED).
Further cPar methods and related classes like cExpression and cDynamicExpression are used by the NED infrastructure to set up and assign parameters. They are documented in the API Reference but they are normally of little interest to users.
4.5.7 Reacting to Parameter Changes¶
It is possible for modules to be notified when the value of a parameter changes at runtime, possibly due to another module dynamically changing it. The typical action is to re-read the parameter and update the module's state if needed.
To enable notification, redefine the handleParameterChange() method of the module class. This method will be called back by the simulation kernel with the parameter name as an argument every time a new value is assigned to a parameter. The method signature is as follows:
void handleParameterChange(const char *parameterName);
The following example shows a module that re-reads its serviceTime parameter when its value changes:
void Queue::handleParameterChange(const char *parameterName)
{
if (strcmp(parameterName, "serviceTime") == 0)
serviceTime = par("serviceTime"); // refresh data member
}
- NOTE
When implementing a handleParameterChange() method, care must be taken to handle the changes of all parameters marked as @mutable in the NED file.
Notifications are suppressed while the network (or module) is being set
up.
- [Prior to OMNeT++ 6.0, notifications were also disabled during the
initialization phase (see [4.3.3]), and
additionally, a handleParameterChange(nullptr) call was made by the
simulation kernel after the last stage of initialization. They are no longer
done, and simulation models exploiting the previous behavior needs to be
updated.]
handleParameterChange() methods need to be implemented carefully because they may be called at a time when the module has not yet completed all initialization stages.
Also, be extremely careful when changing parameters from inside handleParameterChange(), as it is easy to accidentally create an infinite notification loop.
4.6 Accessing Gates and Connections¶
4.6.1 Gate Objects¶
Module gates are represented by cGate objects. Gate objects know which other gates they are connected to and what channel objects are associated with the links.
4.6.1.1 Accessing Gates by Name¶
The cModule class has several member functions that deal with gates. You can look up a gate by name using the gate() method:
cGate *outGate = gate("out");
This works for input and output gates. However, when a gate was declared inout in NED, it is actually represented by the simulation kernel with two gates. Therefore, the above call would result in a gate not found error. The gate() method needs to be told whether you need the input or output half of the gate. This can be done by appending "$i" or "$o" to the gate name. The following example retrieves the two gates for the inout gate "g":
cGate *gIn = gate("g$i");
cGate *gOut = gate("g$o");
Another way is to use the gateHalf() function, which takes the name of the inout gate and either cGate::INPUT or cGate::OUTPUT:
cGate *gIn = gateHalf("g", cGate::INPUT);
cGate *gOut = gateHalf("g", cGate::OUTPUT);
These methods throw an error if the gate does not exist, so they cannot be used to determine whether the module has a particular gate. For that purpose, there is a hasGate() method. For example:
if (hasGate("optOut"))
send(new cMessage(), "optOut");
A gate can also be identified and looked up by a numeric gate ID. You can get the ID from the gate itself (getId() method) or from the module by gate name (findGate() method). The gate() method also has an overloaded variant that returns the gate from the gate ID.
int gateId = gate("in")->getId(); // or:
int gateId = findGate("in");
Gate IDs are more useful with gate vectors, which will be covered in detail in a later section.
4.6.1.2 Gate Vectors¶
Gate vectors have one cGate object per element. To access individual gates in the vector, you need to call the gate() function with an additional index parameter. The index should be between zero and size-1. The size of the gate vector can be obtained using the gateSize() method. The following example iterates through all elements in the gate vector:
for (int i = 0; i < gateSize("out"); i++) {
cGate *gate = gate("out", i);
//...
}
A gate vector cannot have “holes” in it, which means that gate() never returns nullptr or throws an error if the gate vector exists and the index is within bounds.
For inout gates, gateSize() may be called with or without the "$i"/"$o" suffix and returns the same number.
The hasGate() method can be used both with and without an index, and they mean two different things: without an index, it tells whether a gate vector with the given name exists, regardless of its size (it returns true for an existing vector even if its size is currently zero!); with an index, it also checks whether the index is within bounds.
4.6.1.3 Gate IDs¶
A gate can also be accessed by its ID. A very important property of gate IDs is that they are contiguous within a gate vector, meaning the ID of a gate g[k] can be calculated as the ID of g[0] plus k. This allows you to efficiently access any gate in a gate vector because retrieving a gate by ID is more efficient than by name and index. The index of the first gate can be obtained with gate("out",0)->getId(), but it is better to use a dedicated method, gateBaseId(), because it also works when the gate vector size is zero.
Two other important properties of gate IDs are that they are stable and unique (within the module). By stable we mean that the ID of a gate never changes, and by unique we mean that at any given time, no two gates have the same IDs, and that IDs of deleted gates are not reused later. Therefore, gate IDs are unique during the lifetime of a simulation run.
- NOTE
Versions of OMNeT++ prior to 4.0 did not guarantee these properties. Resizing a gate vector could cause its ID range to be relocated if it would have overlapped with the ID range of other gate vectors. OMNeT++ 4.x solves the same problem by interpreting the gate ID as a bitfield, basically containing bits that identify the gate name, and other bits that hold the index. This also means that the theoretical upper limit for a gate size is now smaller, although it is still large enough to be safely ignored for practical purposes.
The following example iterates through a gate vector using IDs:
int baseId = gateBaseId("out");
int size = gateSize("out");
for (int i = 0; i < size; i++) {
cGate *gate = gate(baseId + i);
//...
}
4.6.1.4 Enumerating All Gates¶
If you need to go through all gates of a module, there are two possibilities. One is to use the getGateNames() method, which returns the names of all gates and gate vectors the module has. Then you can call isGateVector(name) to determine whether individual names identify a scalar gate or a gate vector. Gate vectors can be enumerated by index. Also, for inout gates, getGateNames() returns the base name without the "$i"/"$o" suffix, so the two directions need to be handled separately. The gateType(name) method can be used to test whether a gate is inout, input, or output (it returns cGate::INOUT, cGate::INPUT, or cGate::OUTPUT).
Clearly, the above solution can be quite challenging. An alternative is to use the GateIterator class provided by cModule. Here is an example:
for (cModule::GateIterator i(this); !i.end(); i++) {
cGate *gate = *i;
...
}
Here, this denotes the module whose gates are being enumerated (it can be replaced by any cModule * variable).
- NOTE
In earlier versions of OMNeT++, gate IDs used to be small integers, so it made sense to iterate over all gates of a module by enumerating all IDs from zero to a maximum, skipping the holes (nullptrs). However, this is no longer the case with OMNeT++ 4.0 and later versions. Additionally, the gate() method now throws an error when called with an invalid ID, rather than returning nullptr.
4.6.1.5 Adding and Deleting Gates¶
Although rarely needed, it is possible to add and remove gates during simulation. You can add scalar gates and gate vectors, change the size of gate vectors, and remove scalar gates and whole gate vectors. However, it is not possible to remove individual random gates from a gate vector, remove one half of an inout gate (e.g. "gate$o"), or set different gate vector sizes on the two halves of an inout gate vector.
The cModule methods for adding and removing gates are addGate(name,type,isvector=false) and deleteGate(name). Gate vector size can be changed using setGateSize(name,size). None of these methods accept a "$i" or "$o" suffix in gate names.
- NOTE
When memory efficiency is a concern, it is useful to know that in OMNeT++ 4.0 and later, a gate vector will consume significantly less memory than the same number of individual scalar gates.
4.6.1.6 cGate Methods¶
The getName() method of cGate returns the name of the gate or gate vector without the index. If you need a string that contains the gate index as well, use getFullName(). If you also want to include the hierarchical name of the owner module, call getFullPath().
The getType() method of cGate returns the gate type, either cGate::INPUT or cGate::OUTPUT. (It cannot return cGate::INOUT because an inout gate is represented by a pair of cGates.)
If you have a gate that represents half of an inout gate (that is, getName() returns something like "g$i" or "g$o"), you can split the name with the getBaseName() and getNameSuffix() methods. The getBaseName() method returns the name without the $i/$o suffix, and getNameSuffix() returns just the suffix (including the dollar sign). For normal gates, getBaseName() is the same as getName(), and getNameSuffix() returns the empty string.
The methods isVector(), getIndex(), getVectorSize() speak for themselves; size() is an alias for getVectorSize(). For non-vector gates, getIndex() returns 0 and getVectorSize() returns 1.
The getId() method returns the gate ID (not to be confused with the gate index).
The getOwnerModule() method returns the module to which the gate object belongs.
To illustrate these methods, we can modify the gate iterator example to print some information about each gate:
for (cModule::GateIterator i(this); !i.end(); i++) {
cGate *gate = *i;
EV << gate->getFullName() << ": ";
EV << "id=" << gate->getId() << ", ";
if (!gate->isVector())
EV << "scalar gate, ";
else
EV << "gate " << gate->getIndex()
<< " in vector " << gate->getName()
<< " of size " << gate->getVectorSize() << ", ";
EV << "type:" << cGate::getTypeName(gate->getType());
EV << "\n";
}
There are further cGate methods to access and manipulate the connection(s) attached to the gate, which will be covered in the following sections.
4.6.2 Connections¶
Simple module gates normally have one connection attached. However, compound module gates need to be connected both inside and outside of the module to be useful. A series of connections (joined with compound module gates) is called a connection path or just a path. A path is directed, and it normally starts at an output gate of a simple module, ends at an input gate of a simple module, and passes through several compound module gates.
Every cGate object contains pointers to the previous gate and the next gate in the path (returned by the getPreviousGate() and getNextGate() methods). Therefore, a path can be thought of as a double-linked list.
The use of the previous gate and next gate pointers with various gate types is illustrated in Figure below.

The start and end gates of the path can be found using the getPathStartGate() and getPathEndGate() methods, which simply follow the previous gate and next gate pointers, respectively, until they are nullptr.
The isConnectedOutside() and isConnectedInside() methods return whether a gate is connected to the outside or to the inside. They examine either the previous or the next pointer, depending on the gate type (input or output). For example, an output gate is connected outside if the next pointer is non-nullptr; the same function for an input gate checks the previous pointer. Again, refer to Figure below for an illustration.
The isConnected() method is a bit different: it returns true if the gate is fully connected, meaning that for a compound module gate, it is connected both inside and outside, and for a simple module gate, outside.
The following code prints the name of the gate to which a simple module gate is connected:
cGate *gate = gate("somegate");
cGate *otherGate = gate->getType()==cGate::OUTPUT ? gate->getNextGate() :
gate->getPreviousGate();
if (otherGate)
EV << "Gate is connected to: " << otherGate->getFullPath() << endl;
else
EV << "Gate is not connected" << endl;
4.6.3 The Connection's Channel¶
The channel object associated with a connection is accessible via a pointer stored at the source gate of the connection. The pointer is returned by the getChannel() method of the gate:
cChannel *channel = gate->getChannel();
The result may be nullptr, meaning that a connection may not have an associated channel object.
If you have a channel pointer, you can get the source gate of the channel using the getSourceGate() method:
cGate *gate = channel->getSourceGate();
cChannel is just an abstract base class for channels, so to access details of the channel, you might need to cast the resulting pointer into a specific channel class, for example cDelayChannel or cDatarateChannel.
Another specific channel type is cIdealChannel, which basically does nothing: it acts as if there was no channel object assigned to the connection. OMNeT++ sometimes transparently inserts a cIdealChannel into a channel-less connection, for example to hold the display string associated with the connection.
Often, you are not really interested in a specific connection's channel, but rather in the transmission channel (see [4.7.6]) of the connection path that starts at a specific output gate. The transmission channel can be found by following the connection path until you find a channel whose isTransmissionChannel() method returns true. However, cGate has a convenience method for this called getTransmissionChannel(). Here is an example usage:
cChannel *txChan = gate("ppp$o")->getTransmissionChannel();
A complementary method to getTransmissionChannel() is getIncomingTransmissionChannel(). It is usually invoked on input gates and searches the connection path in reverse direction.
cChannel *incomingTxChan = gate("ppp$i")->getIncomingTransmissionChannel();
Both methods throw an error if no transmission channel is found. If this is not desirable, you can use the similar findTransmissionChannel() and findIncomingTransmissionChannel() methods, which simply return nullptr in that case.
Channels are covered in more detail in section [4.8].
4.7 Sending and Receiving Messages¶
At an abstract level, an OMNeT++ simulation model consists of a set of simple modules that communicate with each other through message passing. Simple modules create, send, receive, store, modify, schedule, and destroy messages, while the rest of OMNeT++ exists to facilitate these tasks and collect statistics on what is happening.
Messages in OMNeT++ are instances of the cMessage class or one of its subclasses. Network packets are represented by cPacket, which is also a subclass of cMessage. Message objects are created using the C++ new operator and destroyed using the delete operator when they are no longer needed.
Messages are described in detail in Chapter [5]. At this point, all we need to know is that they are referred to as cMessage * pointers. In the examples below, messages will be created with new cMessage("foo"), where "foo" is a descriptive message name used for visualization and debugging purposes.
4.7.1 Self-Messages¶
Nearly all simulation models need to schedule future events in order to implement timers, timeouts, delays, etc. Some typical examples include:
- A source module that periodically creates and sends messages needs to schedule the next send after every send operation.
- A server that processes jobs from a queue needs to start a timer every time it begins processing a job. When the timer expires, the finished job can be sent out, and a new job may start processing.
- When a packet is sent by a communications protocol that uses retransmission, it needs to schedule a timeout so that the packet can be retransmitted if no acknowledgment arrives within a certain amount of time.
In OMNeT++, you can solve such tasks by having the simple module send a message to itself; the message will be delivered to the simple module at a later point in time. Messages used this way are called self-messages, and the module class has special methods for them that allow for implementing self-messages without gates and connections.
4.7.1.1 Scheduling an Event¶
The module can send a message to itself using the scheduleAt() function. scheduleAt() accepts an absolute simulation time:
scheduleAt(t, msg);
Since the target time is often relative to the current simulation time, the function has another variant, scheduleAfter(), which takes a delta instead of an absolute simulation time. The following calls are equivalent:
scheduleAt(simTime()+delta, msg); scheduleAfter(delta, msg);
Self-messages are delivered to the module in the same way as other messages (via the usual receive calls or handleMessage()); the module can call the isSelfMessage() member of any received message to determine if it is a self-message.
You can determine whether a message is currently in the FES by calling its isScheduled() member function.
4.7.1.2 Canceling an Event¶
Scheduled self-messages can be canceled (i.e. removed from the FES). This feature facilitates implementing timeouts.
cancelEvent(msg);
The cancelEvent() function takes a pointer to the message to be canceled, and also returns the same pointer. After canceling it, you may delete the message or reuse it in subsequent scheduleAt() calls. cancelEvent() has no effect if the message is not scheduled at that time.
There is also a convenience method called cancelAndDelete(), implemented as if (msg!=nullptr) delete cancelEvent(msg). This method is primarily useful for writing destructors.
The following example shows how to implement a timeout in a simple imaginary stop-and-wait protocol. The code uses a timeoutEvent module class data member that stores the pointer of the cMessage used as a self-message, and compares it to the pointer of the received message to identify whether a timeout has occurred.
void Protocol::handleMessage(cMessage *msg)
{
if (msg == timeoutEvent) {
// timeout expired, re-send packet and restart timer
send(currentPacket->dup(), "out");
scheduleAt(simTime() + timeout, timeoutEvent);
}
else if (...) { // if acknowledgment received
// cancel timeout, prepare to send next packet, etc.
cancelEvent(timeoutEvent);
...
}
else {
...
}
}
4.7.1.3 Re-scheduling an Event¶
To reschedule an event that is currently scheduled to a different simulation time, it must first be canceled using cancelEvent(). This is shown in the following example code:
if (msg->isScheduled())
cancelEvent(msg);
scheduleAt(simTime() + delay, msg);
For convenience, the above functionality is available as a single call, using the functions rescheduleAt() and rescheduleAfter(). The first one takes an absolute simulation time, and the second one takes a delta relative to the current simulation time.
rescheduleAt(t, msg); rescheduleAfter(delta, msg);
Using these dedicated functions is potentially more efficient than the cancelEvent() + scheduleAt() combination.
4.7.2 Sending Messages¶
Once created, a message object can be sent through an output gate using one of the overloaded send() methods of cSimpleModule. There are six variations available, as the gate can be specified in multiple ways and the methods also accept an optional SendOptions structure:
send(cMessage *msg, const char *gateName, int gateIndex=-1); send(cMessage *msg, cGate *gate); send(cMessage *msg, int gateId); send(cMessage *msg, const SendOptions& options, const char *gateName, int gateIndex=-1); send(cMessage *msg, const SendOptions& options, cGate *gate); send(cMessage *msg, const SendOptions& options, int gateId);
The most common way of specifying the gate is with its name (gateName parameter). If the name identifies a gate vector, an additional gateIndex parameter is required to select the desired element of the vector.
send(msg, "out"); send(msg, "outv", 10); // send via outv[10]
To send a message on an inout gate, remember that an inout gate consists of an input and an output gate combined. The input and output components of an inout gate are distinguished by appending the $i and $o suffixes to their names, respectively. Thus, the gate name needs to be specified in the send() call with the $o suffix:
send(msg, "g$o"); send(msg, "g$o", 10); // assuming g[] is an inout gate vector
Using a gate pointer (cGate*) will result in more efficient code, as it spares the lookup inside the send() call. Typically, the module code obtains the gate pointer once (e.g., as part of the initialization) and then reuses it throughout the simulation.
cGate *outGate = gate("out");
...
send(msg, outGate);
Using a gate ID (gateId parameter) is slightly less efficient than using the gate pointer, but it has the advantage that gate vectors can be indexed with it efficiently, taking advantage of the fact that elements of a gate vector occupy a contiguous ID range.
int outGateBaseId = gateBaseId("outv"); // or: gate("outv", 0)->getId()
...
int index = 10;
send(msg, outGateBaseId + index); // sends on outv[10]
The optional SendOptions, as well as other send variants like sendDelayed() and sendDirect(), will be covered in later sections.
4.7.2.1 What send() Does¶
The send() call causes the message to travel along the full length of the connection path that starts at the module and will be "delivered" to the module at the last gate in the path. The connection path is the series of connections defined by the getNextGate() method of cGate; the path ends when getNextGate() returns nullptr.
At each hop of the path, the associated channel object, if there is one, has authority over what should happen to the message. More precisely, the processMessage() method of cChannel is invoked with the message as an argument (and with some extra arguments such as SendOptions). Individual channel types override the processMessage() method to apply various types of processing. For example, they may modify the packet, add (propagation) delay, or signal that the packet be discarded.
After the message has reached the last gate in the connection path (the gate where getNextGate() returns nullptr), the message will be passed to the arrived() method of the module to which the last gate belongs. By default, the arrived() method inserts the message into the FES, scheduled for the message's arrival time, before returning. The message will only be actually passed to the module's handleMessage() (or activity()) method when the simulation has advanced to the point where the message becomes the first event in the FES.
The arrived() method is not normally overridden in simulation models. However, it is noteworthy that the implementation of arrived() in cModule (which commonly represents compound modules) stops the simulation, and displays an error message along the lines of “Message arrived at a compound module”.
4.7.3 Broadcasts and Retransmissions¶
When implementing broadcasts or retransmissions, two frequently occurring tasks in protocol simulation, you might be tempted to use the same message in multiple send() operations. However, this is not allowed because a message cannot be in two places at the same time. Once sent out, the message no longer belongs to the module; it is taken over by the simulation kernel and will eventually be delivered to the destination module. The sender module should not refer to the message's pointer any further. Once the message arrives in the destination module, that module will have full control over it; it can send it on, destroy it immediately, or store it for later handling. The same applies to messages that have been scheduled; they belong to the simulation kernel until they are delivered back to the module.
To enforce these rules, all message sending functions check whether
the module owns the message it is about to send. If the message is owned by
another module, in a queue, currently scheduled, etc., a runtime error
will be generated: not owner of message.
- [This feature does not significantly increase runtime overhead because
it uses object ownership management (described in
Section [7.14]);
it merely checks that the owner of the message is the module
that wants to send it.]
4.7.3.1 Broadcasting Messages¶
In your model, you may need to broadcast a message to several destinations. Broadcasts can be implemented in a simple module by sending out copies of the same message, for example on every gate of a gate vector. As previously mentioned, you cannot send the same message object multiple times; instead, you need to create copies (duplicates) of the message object and send them.
Here is an example:
for (int i = 0; i < n; i++) {
cMessage *copy = msg->dup();
send(copy, "out", i);
}
delete msg;
It is important to note that copying the message for the last gate is redundant; you can just send the original message there. Also, you can use gate IDs to avoid looking up the gate by name for each send operation. You can exploit the fact that the ID of gate k in a gate vector can be produced as baseID + k. An improved version of the code looks like this:
int outGateBaseId = gateBaseId("out");
for (int i = 0; i < n; i++)
send(i==n-1 ? msg : msg->dup(), outGateBaseId+i);
4.7.3.2 Retransmissions¶
Many communication protocols involve retransmitting packets (frames). When implementing retransmissions, you cannot simply hold a pointer to the same message object and send it again and again; you will get a runtime error of not owner of message on the first resend.
Instead, for retransmission, you should create and send copies of the message, and retain the original. When you are sure there will not be any more retransmissions, you can delete the original message.
Creating and sending a copy:
// (re)transmit packet: cMessage *copy = packet->dup(); send(copy, "out");
And finally, when no more retransmissions will occur:
delete packet;
4.7.4 Delayed Sending¶
Sometimes it is necessary for a module to hold a message for some time interval and then send it. In such cases, you can use the scheduleAt() function, but there is a more straightforward method: delayed sending. There are several methods provided for delayed sending:
sendDelayed(cMessage *msg, double delay, const char *gateName, int gateIndex=-1); sendDelayed(cMessage *msg, double delay, int gateId); sendDelayed(cMessage *msg, double delay, cGate *gate);
These methods are similar to the regular send() methods, but with an additional delay parameter, which must be non-negative. The effect of the function is similar to if the module had kept the message for the delay interval and then sent it afterward; even the sending time timestamp of the message will be set to the current simulation time plus the delay.
An example call:
sendDelayed(msg, 0.005, "out");
The sendDelayed() function does not perform a scheduleAt() followed by a send(), but rather it computes everything about the message sending up front, including the arrival time and the target module. This has two consequences. First, sendDelayed() is more efficient than a scheduleAt() followed by a send() because it eliminates one event. Second, changes in the connection path during the delay will not be taken into account (because everything is calculated in advance, before the changes take place).
- NOTE
Although sendDelayed() is more efficient, you should think twice before using it in a simulation model. It may be suitable for one-shot simulation models known to be static, but it is generally not recommended for reusable modules that need to work correctly in a wide variety of simulation models, where a connection in the path may get deleted, disabled, or reconnected to another module during the delay period.
4.7.5 Direct Message Sending¶
The sendDirect() function allows for sending a message directly to an input gate of another module. This is useful for simulating wireless transmissions. sendDirect() has several variants because the target gate can be specified in various ways, a propagation delay and duration can be optionally given, and these two can also be specified using a SendOptions structure.
Here are the variants of sendDirect():
sendDirect(cMessage *msg, cModule *targetModule, int gateId);
sendDirect(cMessage *msg, cModule *targetModule, const char *gateName,
int gateIndex=-1);
sendDirect(cMessage *msg, cGate *gate);
sendDirect(cMessage *msg, simtime_t propagationDelay, simtime_t duration,
cModule *targetModule, int gateId);
sendDirect(cMessage *msg, simtime_t propagationDelay, simtime_t duration,
cModule *targetModule, const char *gateName, int gateIndex=-1);
sendDirect(cMessage *msg, simtime_t propagationDelay, simtime_t duration,
cGate *gate);
sendDirect(cMessage *msg, const SendOptions& options, cModule *targetModule,
int gateId);
sendDirect(cMessage *msg, const SendOptions& options, cModule *targetModule,
const char *gateName, int gateIndex=-1);
sendDirect(cMessage *msg, const SendOptions& options, cGate *gate);
Here is an example of sending a message directly to a module's input gate:
cModule *targetModule = getParentModule()->getSubmodule("node2");
sendDirect(new cMessage("msg"), targetModule, "in");
At the target module, there is no difference between messages received directly and those received over connections.
The target gate must be an unconnected gate; in other words, modules must have dedicated gates to be able to receive messages sent via sendDirect(). It is not possible to have a gate that receives messages via both connections and sendDirect().
It is recommended to tag gates dedicated for receiving messages via sendDirect() with the @directIn property in the module's NED declaration. This will cause OMNeT++ not to complain that the gate is not connected in the network or compound module where the module is used.
Here is an example:
simple Radio {
gates:
input radioIn @directIn; // for receiving air frames
}
The target module can be a simple module or a compound module. The message will follow the connections that start at the target gate and will be delivered to the end module in the path, just like with normal connections. The path must end with a simple module.
It is even permitted to send to an output gate, which will also cause the message to follow the connections starting at that gate. This can be useful, for example, when several submodules are sending to a single output gate of their parent module.
The transmission duration parameter is important when the message is also a packet, i.e. subclassed from cPacket. In that case, the duration will be written into the packet, and can be read by the receiver with the getDuration() method of the packet. For non-packet messages, the duration parameter is ignored.
The receiver module can choose whether it wants the simulation kernel to deliver the packet object to it at the start or at the end of the reception period. The default is the latter; the module can change it by calling setDeliverImmediately() on the final input gate, that is, on targetGate->getPathEndGate().
4.7.6 Packet Transmissions¶
When a message is sent out on a gate, it usually travels through a series of connections until it arrives at the destination module. We call this series of connections a connection path.
Several connections in the path may have an associated channel,
but there can be only one channel per path that models nonzero
transmission duration. This restriction is enforced by the simulation
kernel. This channel is called the transmission channel.
- [Moreover, if sendDirect() with a nonzero duration
was used to send the packet to the start gate of the path,
then the path cannot have a transmission channel at all.
The point is that the a transmission duration must be unambiguous.]
- NOTE
In practice, this means that there can be only one ned.DatarateChannel in the path. Note that unnamed channels with a datarate parameter also map to ned.DatarateChannel.
4.7.6.1 Transmitting a Packet¶
Packets may only be sent when the transmission channel is idle. This means that after each transmission, the sender module needs to wait until the channel has finished transmitting before it can send another packet.
You can get a pointer to the transmission channel by calling the getTransmissionChannel() method on the output gate. The channel's isBusy() and getTransmissionFinishTime() methods can tell you whether a channel is currently transmitting, and when the transmission is going to finish. (When the latter is less or equal the current simulation time, the channel is free.) If the channel is currently busy, sending needs to be postponed: the packet can be stored in a queue, and a timer (self-message) can be scheduled for the time when the channel becomes empty.
A code example to illustrate the above process:
cPacket *pkt = ...; // packet to be transmitted
cChannel *txChannel = gate("out")->getTransmissionChannel();
simtime_t txFinishTime = txChannel->getTransmissionFinishTime();
if (txFinishTime <= simTime()) {
// channel free; send out packet immediately
send(pkt, "out");
}
else {
// store packet and schedule timer; when the timer expires,
// the packet should be removed from the queue and sent out
txQueue.insert(pkt);
scheduleAt(txFinishTime, endTxMsg);
}
- NOTE
If there is a channel with a propagation delay in the path before the transmission channel, the delay should be manually subtracted from the value returned by getTransmissionFinishTime()! The same applies to isBusy(): it tells whether the channel is currently busy, and not whether it will be busy when a packet that you send gets there. It is therefore advisable that you never use propagation delays in front of a transmission channel in a path.
The getTransmissionChannel() method searches the connection path each time it is called. If performance is important, it is a good idea to obtain the transmission channel pointer once, and then cache it. When the network topology changes, the cached channel pointer needs to be updated; section [4.14.3] describes the mechanism that can be used to get notifications about topology changes.
4.7.6.2 Implementation of Message Sending¶
Message sending is implemented like this: the arrival time and the bit error flag of a message are calculated right inside the send() call, then the message is inserted into the FES with the calculated arrival time. The message does not get scheduled individually for each link. This implementation was chosen because of its run-time efficiency.
- NOTE
The consequence of this implementation is that any change in the channel's parameters (delay, data rate, bit error rate, etc.) will only affect messages sent after the change. Messages already underway will not be influenced by the change.
This is not a huge problem in practice, but if it is important to model channels with changing parameters, the solution is to insert simple modules into the path to ensure strict scheduling.
The code which inserts the message into the FES is the arrived() method of the recipient module. By overriding this method it is possible to perform custom processing at the recipient module immediately, still from within the send() call. Use only if you know what you are doing!
4.7.7 Transmission Updates¶
In the modeling of communication networks, it is sometimes necessary to model that the transmission of a packet does not go through as planned, but is aborted or finished prematurely. For example, when a colliding transmission is detected on an Ethernet link that uses CSMA/CD, the transmission of the packet is aborted. Even on a duplex Ethernet link, the transmission of an Ethernet frame may be suspended (and later resumed) so that a higher-priority frame can be transmitted immediately, a feature called frame preemption. It is also possible that a transmission is extended to a longer duration, for example when the frame's payload is appended on the fly, due to the use of frame aggregation.
OMNeT++ allows for modeling such scenarios using a special mechanism called transmission updates. The basic idea is that while a transmission is underway, the sender can change its mind on when the transmission will actually finish, and what the final packet content will be. It announces the change by sending a special packet, called a transmission update. The transmission update packet contains the remaining transmission duration, and the updated packet content.
This mechanism allows for both shortening and extending the transmission
duration (but not retroactively, i.e. the remaining duration cannot be
negative). Any number of updates may be sent for a transmission, and the
original transmission does not need to be marked specially to allow the use of
updates. Aborting a transmission is modeled by simply sending an update with
zero remaining duration and the truncated packet.
- [Before OMNeT++
version 6.0, using the forceTransmissionFinishTime() channel method was
recommended as a way to implement aborting a transmission. It is now considered
obsolete, and should not be used.]
- NOTE
The receiver has to be prepared to receive transmission updates, and to react to them appropriately. The details are explained in section [4.7.8.3].
4.7.7.1 Sending Transmission Updates¶
To allow a packet transmission to be updated later, a transmission ID needs to be chosen, specified in the send call, and remembered for later. The transmission ID is needed for the simulation kernel to match later updates with the original packet. It is convenient to choose the ID of the packet as transmission ID.
Transmission updates are sent using the normal message sending functions (send(), sendDirect(), etc.), specifying a SendOptions that has the updateTx field set and contains the transmission ID. It is recommended to use utility functions of SendOptions, such as finishTx() and updateTx(), to set up the SendOptions.
An example for sending a packet, allowing it to be updated later:
cPacket *pk = new cPacket("pk", 0, length*8);
transmissionId = pk->getId();
send(pk, SendOptions().transmissionId(transmissionId), "out");
At a later time, the transmission update can be sent with the following code:
cPacket *pk = new cPacket("update", 0, updatedLength*8);
send(pk, SendOptions().updateTx(transmissionId), "out");
For the transmission to be modeled, the simulation kernel needs to obtain values for the packet duration and the remaining duration. Input for these values may come from multiple alternative sources:
- If the channel defines a data rate, the duration can be computed from that and the packet length.
- If the channel does not contain the data rate, the sender must specify it explicitly in SendOptions.
- Once the duration is known, the remaining duration can be computed by the channel as start time + duration - current simulation time.
- Or if the channel does not keep track of the transmission start times, the remaining duration must be specified by the model in SendOptions.
- Etc.
The cDatarateChannel class, the default transmission channel type in OMNeT++, supports many variations of the above.
For wireless transmissions modeled with sendDirect, there is no channel, so the duration, the remaining duration, and also the propagation delay must be specified explicitly. Here is an example of sending the original packet:
cGate *targetGate = peerNode->gate("directIn");
cPacket *pk = new cPacket("directPk", 0, length*8);
transmissionId = pk->getId();
txStartTime = simTime();
propagationDelay = ...;
simtime_t duration = pk->getBitLength()/BITRATE;
sendDirect(pk,
SendOptions().transmissionId(transmissionId).
propagationDelay(propagationDelay).duration(duration),
targetGate);
And the corresponding update:
cPacket *pk = new cPacket("directPkUpdate", 0, updatedLength*8);
simtime_t newDuration = pk->getBitLength()/BITRATE;
simtime_t remainingDuration = txStartTime + newDuration - simTime();
sendDirect(pk,
SendOptions().updateTx(transmissionId, remainingDuration).
propagationDelay(propagationDelay).duration(newDuration),
targetGate);
4.7.8 Receiving Packets¶
Packets in OMNeT++ are delivered to modules in the same way as normal messages, through the handleMessage() method. To access packet-specific methods and fields, it is necessary to cast the incoming message to cPacket.
cPacket has several fields that provide information about the packet's last transmission over the transmission channel. These fields are:
- hasBitError(): Returns true if the packet has any bit errors.
- isUpdate(): Returns true if the packet is a transmission update.
- getTransmissionId(): For transmission updates, returns the ID that identifies the transmission.
- isReceptionStart(): Returns true if the packet represents the start of the reception process.
- isReceptionEnd(): Returns true if the packet represents the end of the reception process.
- getDuration(): Retrieves the total transmission duration of the packet.
- getRemainingDuration(): Obtains the remaining transmission time of the packet.
Based on the information carried by these fields, processing of the received packet typically involves performing the steps described in the following sections.
4.7.8.1 Checking for Bit Errors¶
Packets may have a bit error flag set due to channel error modeling. It is the receiver's responsibility to check this flag using hasBitError() and act accordingly, typically by discarding the packet.
4.7.8.2 Reception Start vs. Reception End¶
By default, packets are delivered at the end of their reception. To change this behavior, call gate("in")->setDeliverImmediately(true); in the module's initialize() method. This setting causes packets to be delivered at the start of reception.
gate("in")->setDeliverImmediately(true);
This method may only be called on simple module input gates, and it instructs the simulation kernel to deliver packets arriving through that gate at the simulation time that corresponds to the beginning of the reception process. The setDeliverImmediately() method only needs to be called once, so it is typically done in the initialize() method of the module.
When a packet is delivered to the module, you can call the packet's isReceptionStart() and isReceptionEnd() methods to determine whether it represents the start or end of the reception process. (Note that for a transmission update, both methods may return false.)
4.7.8.3 Handling Transmission Updates¶
The receiver should recognize transmission updates using isUpdate() and react accordingly.
Receivers that receive the packet at the end of the reception, which is the default behavior, will only receive the final update. The original packet and intermediate updates are managed by the simulation kernel.
Receivers that receive the packet at the start of the reception (as selected by setDeliverImmediately(true) in the previous section) should be prepared to receive the original packet and updates, and handle them appropriately. If an update arrives, the receiver should replace the original packet with the update and reschedule any potential end-reception event to simTime() + pk->getRemainingDuration().
As a safeguard against unprepared modules accidentally processing transmission updates as independent packets, the receiver is only given transmission updates if it has explicitly declared support for them. The module declares support by calling setTxUpdateSupport(true), usually in the initialize() method.
Non-transmission channels handle updates in the same way as they handle any other messages and packets.
4.7.9 Receiving Messages with activity()¶
4.7.9.1 Receiving Messages¶
Modules based on activity() receive messages using the receive() method of cSimpleModule. The receive() method cannot be used with modules based on handleMessage().
cMessage *msg = receive();
The receive() function accepts an optional timeout
parameter (in the form of a delta, not an
absolute simulation time). If no message arrives within the timeout period,
the function returns nullptr.
- [Putaside queue and the functions receiveOn(),
receiveNew(), and receiveNewOn() were deprecated
in OMNeT++ 2.3 and removed in OMNeT++ 3.0.]
simtime_t timeout = 3.0;
cMessage *msg = receive(timeout);
if (msg == nullptr) {
... // handle timeout
}
else {
... // process message
}
4.7.9.2 The wait() Function¶
The wait() function suspends the execution of the module for a given amount of simulation time (a delta). wait() cannot be used with modules based on handleMessage().
wait(delay);
Internally, the wait() function is implemented by a combination of scheduleAt() and receive(). The wait() function is very convenient in modules that do not need to be prepared for incoming messages, such as message generators. Here is an example usage:
for (;;) {
// Wait for some, potentially random, amount of time specified
// in the interarrivalTime volatile module parameter
wait(par("interarrivalTime").doubleValue());
// Generate and send message
...
}
It is a runtime error if a message arrives during the wait interval. If you expect messages to arrive during the wait period, you can use the waitAndEnqueue() function. It takes a pointer to a queue object of class cQueue, described in Chapter [7], in addition to the wait interval. Messages that arrive during the wait interval are accumulated in the queue and can be processed after the waitAndEnqueue() call returns.
Here is an example:
cQueue queue("queue");
...
waitAndEnqueue(waitTime, &queue);
if (!queue.empty())
{
// Process messages that arrived during the wait interval
...
}
4.8 Channels¶
4.8.1 Overview¶
Channels encapsulate parameters and behavior associated with connections. Channel types are similar to simple modules in that they are declared in NED, and there are C++ implementation classes underlying them. Section [3.5] describes NED language support for channels and explains how to associate C++ classes with declared channel types in NED.
C++ channel classes must subclass the abstract base class cChannel. However, when creating a new channel class, it may be more practical to extend one of the existing C++ channel classes behind the three predefined NED channel types:
- cIdealChannel implements the functionality of ned.IdealChannel.
- cDelayChannel implements the functionality of ned.DelayChannel.
- cDatarateChannel implements the functionality of ned.DatarateChannel.
Channel classes need to be registered with the Define_Channel() macro, just like simple module classes need Define_Module().
The channel base class cChannel inherits from cComponent, so channels participate in the initialization and finalization protocol (initialize() and finish()) described in [4.3.3].
The parent module of a channel (as returned by getParentModule()) is the module that contains the connection. If a connection connects two modules that are children of the same compound module, the channel's parent is the compound module. If the connection connects a compound module to one of its submodules, the channel's parent is also the compound module.
4.8.2 The Channel API¶
When subclassing Channel, the following pure virtual member functions need to be overridden:
- bool isTransmissionChannel() const
- simtime_t getTransmissionFinishTime() const
- Result processMessage(cMessage *msg, const SendOptions& options, simtime_t t)
The first two functions are usually one-liners; the channel behavior is encapsulated in the third function, processMessage().
4.8.2.1 Transmission Channels¶
The first function, isTransmissionChannel(), determines whether the channel is a transmission channel, i.e. one that models transmission duration. A transmission channel sets the duration field of packets sent through it (see the setDuration() field of cPacket).
The getTransmissionFinishTime() function is only used with transmission channels, and it should return the simulation time the sender will finish (or has finished) transmitting. This method is called by modules that send on a transmission channel to find out when the channel becomes available. The channel's isBusy() method is implemented simply as return getTransmissionFinishTime() < simTime(). For non-transmission channels, the getTransmissionFinishTime() return value may be any simulation time which is less than or equal to the current simulation time.
4.8.2.2 The processMessage() Function¶
The third function, processMessage(), encapsulates the channel's functionality. However, before going into the details of this function, we need to understand how OMNeT++ handles message sending on connections.
Inside the send() call, OMNeT++ follows the connection path denoted by the getNextGate() functions of gates until it reaches the target module. At each “hop”, the corresponding connection's channel (if the connection has one) gets a chance to add to the message's arrival time (propagation time modeling), calculate a transmission duration, and modify the message object in various ways, such as setting the bit error flag in it (bit error modeling). After processing all hops that way, OMNeT++ inserts the message object into the Future Events Set (FES, see section [4.1.2]), and the send() call returns. Then OMNeT++ continues to process events in increasing timestamp order. The message will be delivered to the target module's handleMessage() (or receive()) function when it gets to the front of the FES.
A few more details: a channel may instruct OMNeT++ to delete the message instead of inserting it into the FES; this can be useful to model disabled channels or to model that the message has been lost altogether. The getDeliverOnReceptionStart() flag of the final gate in the path will determine whether the transmission duration will be added to the arrival time or not. Packet transmissions have been described in section [4.7.6].
Now, back to the processMessage() method.
The method gets called as part of the above process when the message is processed at the given hop. The method's arguments are the message object, the simulation time the beginning of the message will reach the channel (i.e., the sum of all previous propagation delays), and a struct in which the method can return the results:
Result processMessage(cMessage *msg, const SendOptions& options, simtime_t t);
The Result struct is an inner type of cChannel and looks like this:
struct Result
{
bool discard = false; // whether the channel has lost the msg
simtime_t delay; // propagation delay
simtime_t duration; // transmission duration
simtime_t remainingDuration; // remaining tx duration (for tx update)
};
It also has a constructor that initializes all fields to zero; it is left out for brevity.
The method should model the transmission of the given message starting at the given t time and store the results (propagation delay, transmission duration, deletion flag) in the result object. Only the relevant fields in the result object need to be changed; others can be left untouched.
Transmission duration and bit error modeling only apply to packets (i.e., to instances of cPacket, where cMessage's isPacket() returns true); they should be skipped for non-packet messages. processMessage() does not need to call the setDuration() method on the packet; this is done by the simulation kernel. However, it should call setBitError(true) on the packet if error modeling results in bit errors.
If the method sets the discard flag in the result object, that means that the message object will be deleted by OMNeT++; this facility can be used to model that the message gets lost in the channel.
The processMessage() method does not need to throw an error on overlapping transmissions or if the packet's duration field is already set; these checks are done by the simulation kernel before processMessage() is called.
4.8.3 Channel Examples¶
To illustrate coding channel behavior, we look at how the built-in channel types are implemented.
cIdealChannel lets messages and packets pass through without any delay or change. Its isTransmissionChannel() method returns false, getTransmissionFinishTime() returns 0s, and the body of its processMessage() method is empty:
cChannel::Result cIdealChannel::processMessage(cMessage *msg,
const SendOptions& options, simtime_t t)
{
return Result();
}
cDelayChannel implements propagation delay, and it can be disabled; in its disabled state, messages sent through it will be discarded. This class still models zero transmission duration, so its isTransmissionChannel() and getTransmissionFinishTime() methods still return false and 0s. The processMessage() method sets the appropriate fields in the Result struct:
cChannel::Result cDelayChannel::processMessage(cMessage *msg,
const SendOptions& options, simtime_t t)
{
Result result;
// if channel is disabled, signal that the message should be deleted
if (isDisabled) {
result.discard = true;
return result;
}
// propagation delay modeling
result.delay = delay;
return result;
}
The handleParameterChange() method is also redefined, so that
the channel can update its internal delay and isDisabled
data members if the corresponding channel parameters change during simulation.
- [This code is a little simplified; the actual code uses a bit
in a bitfield to store the value of isDisabled.]
cDatarateChannel is different. It performs packet duration modeling (duration is calculated from the data rate and the length of the packet), so isTransmissionChannel() returns true. getTransmissionFinishTime() returns the value of a txfinishtime data member, which gets updated after every packet.
simtime_t cDatarateChannel::getTransmissionFinishTime() const
{
return txfinishtime;
}
cDatarateChannel's processMessage() method makes use of the isDisabled, datarate, ber, and per data members, which are also kept up to date with the help of handleParameterChange().
cChannel::Result cDatarateChannel::processMessage(cMessage *msg,
const SendOptions& options, simtime_t t)
{
Result result;
// if channel is disabled, signal that the message should be deleted
if (isDisabled) {
result.discard = true;
return result;
}
// datarate modeling
if (datarate != 0 && msg->isPacket()) {
simtime_t duration = ((cPacket *)msg)->getBitLength() / datarate;
result.duration = duration;
txfinishtime = t + duration;
}
else {
txfinishtime = t;
}
// propagation delay modeling
result.delay = delay;
// bit error modeling
if ((ber != 0 || per != 0) && msg->isPacket()) {
cPacket *pkt = (cPacket *)msg;
if (ber != 0 && dblrand() < 1.0 - pow(1.0-ber, (double)pkt->getBitLength()))
pkt->setBitError(true);
if (per != 0 && dblrand() < per)
pkt->setBitError(true);
}
return result;
}
4.9 Stopping the Simulation¶
4.9.1 Normal Termination¶
You can terminate the simulation using the endSimulation() function:
endSimulation();
endSimulation() is rarely needed in practice because you can specify simulation time and CPU time limits in the ini file (see later).
4.9.2 Raising Errors¶
When the simulation encounters an error condition, it can throw a cRuntimeError exception to terminate the simulation with an error message. (Under Cmdenv, the exception also causes a nonzero program exit code). The cRuntimeError class has a constructor with a printf()-like argument list. An example:
if (windowSize <= 0)
throw cRuntimeError("Invalid window size %d; must be >=1", windowSize);
Do not include a newline (\n), period, or exclamation mark in the error text; it will be added by OMNeT++.
The same effect can be achieved by calling the error() method of cModule:
if (windowSize <= 0)
error("Invalid window size %d; must be >=1", windowSize);
Of course, the error() method can only be used when a module pointer is available.
4.10 Finite State Machines¶
4.10.1 Overview¶
Finite State Machines (FSMs) can make life easier when dealing with handleMessage(). OMNeT++ provides a class and a set of macros to build FSMs.
The key points are:
- There are two kinds of states: transient and steady. On each event (that is, at each call to handleMessage()), the FSM transitions out of the current (steady) state, undergoes a series of state changes (runs through a number of transient states), and finally arrives at another steady state. Thus between two events, the system is always in one of the steady states. Transient states are therefore not really necessary -- they exist only to group actions to be taken during a transition in a convenient way.
- You can assign program code to handle entering and leaving a state, known as entry/exit code. Staying in the same state is handled as leaving and re-entering the state.
- Entry code should not modify the state (this is verified by OMNeT++). State changes (transitions) must be put into the exit code.
OMNeT++'s FSMs can be nested. This means that any state (or rather, its entry or exit code) may contain a further full-fledged FSM_Switch() (see below). This allows you to introduce sub-states and thereby bring some structure into the state space if it becomes too large.
4.10.1.1 The FSM API¶
FSM state is stored in an object of type cFSM. The possible states are defined by an enum; the enum is also a place to define which state is transient and which is steady. In the following example, SLEEP and ACTIVE are steady states and SEND is transient (the numbers in parentheses must be unique within the state type and they are used for constructing the numeric IDs for the states):
enum {
INIT = 0,
SLEEP = FSM_Steady(1),
ACTIVE = FSM_Steady(2),
SEND = FSM_Transient(1),
};
The actual FSM is embedded in a switch-like statement, FSM_Switch(), with cases for entering and leaving each state:
FSM_Switch(fsm)
{
case FSM_Exit(state1):
//...
break;
case FSM_Enter(state1):
//...
break;
case FSM_Exit(state2):
//...
break;
case FSM_Enter(state2):
//...
break;
//...
};
State transitions are done via calls to FSM_Goto(), which simply stores the new state in the cFSM object:
FSM_Goto(fsm, newState);
The FSM starts from the state with the numeric code 0; this state is conventionally named INIT.
4.10.1.2 Debugging FSMs¶
FSMs can log their state transitions, with the output looking like this:
... FSM GenState: leaving state SLEEP FSM GenState: entering state ACTIVE ... FSM GenState: leaving state ACTIVE FSM GenState: entering state SEND FSM GenState: leaving state SEND FSM GenState: entering state ACTIVE ... FSM GenState: leaving state ACTIVE FSM GenState: entering state SLEEP ...
To enable the above output, define FSM_DEBUG before including omnetpp.h.
#define FSM_DEBUG // enables debug output from FSMs #include <omnetpp.h>
FSMs perform their logging via the FSM_Print() macro, defined as something like this:
#define FSM_Print(fsm,exiting)
(EV << "FSM " << (fsm).getName()
<< ((exiting) ? ": leaving state " : ": entering state ")
<< (fsm).getStateName() << endl)
The log output format can be changed by undefining FSM_Print() after the inclusion of omnetpp.h, and providing a new definition.
4.10.1.3 Implementation¶
FSM_Switch() is a macro. It expands to a switch statement embedded in a for() loop which repeats until the FSM reaches a steady state.
Infinite loops are avoided by counting state transitions: if an FSM goes through 64 transitions without reaching a steady state, the simulation will terminate with an error message.
4.10.1.4 An Example¶
Let us write another bursty packet generator. It will have two states, SLEEP and ACTIVE. In the SLEEP state, the module does nothing. In the ACTIVE state, it sends messages with a given inter-arrival time. The code was taken from the Fifo2 sample simulation.
#define FSM_DEBUG
#include <omnetpp.h>
using namespace omnetpp;
class BurstyGenerator : public cSimpleModule
{
protected:
// parameters
double sleepTimeMean;
double burstTimeMean;
double sendIATime;
cPar *msgLength;
// FSM and its states
cFSM fsm;
enum {
INIT = 0,
SLEEP = FSM_Steady(1),
ACTIVE = FSM_Steady(2),
SEND = FSM_Transient(1),
};
// variables used
int i;
cMessage *startStopBurst;
cMessage *sendMessage;
// the virtual functions
virtual void initialize();
virtual void handleMessage(cMessage *msg);
};
Define_Module(BurstyGenerator);
void BurstyGenerator::initialize()
{
fsm.setName("fsm");
sleepTimeMean = par("sleepTimeMean");
burstTimeMean = par("burstTimeMean");
sendIATime = par("sendIATime");
msgLength = &par("msgLength");
i = 0;
WATCH(i); // always put watches in initialize()
startStopBurst = new cMessage("startStopBurst");
sendMessage = new cMessage("sendMessage");
scheduleAt(0.0,startStopBurst);
}
void BurstyGenerator::handleMessage(cMessage *msg)
{
FSM_Switch(fsm) {
case FSM_Exit(INIT):
// transition to SLEEP state
FSM_Goto(fsm,SLEEP);
break;
case FSM_Enter(SLEEP):
// schedule end of sleep period (start of next burst)
scheduleAt(simTime()+exponential(sleepTimeMean), startStopBurst);
break;
case FSM_Exit(SLEEP):
// schedule end of this burst
scheduleAt(simTime()+exponential(burstTimeMean), startStopBurst);
// transition to ACTIVE state:
if (msg!=startStopBurst) {
error("invalid event in state ACTIVE");
}
FSM_Goto(fsm,ACTIVE);
break;
case FSM_Enter(ACTIVE):
// schedule next sending
scheduleAt(simTime()+exponential(sendIATime), sendMessage);
break;
case FSM_Exit(ACTIVE):
// transition to either SEND or SLEEP
if (msg==sendMessage) {
FSM_Goto(fsm,SEND);
} else if (msg==startStopBurst) {
cancelEvent(sendMessage);
FSM_Goto(fsm,SLEEP);
} else {
error("invalid event in state ACTIVE");
}
break;
case FSM_Exit(SEND): {
// generate and send out job
char msgname[32];
sprintf(msgname, "job-%d", ++i);
EV << "Generating " << msgname << endl;
cMessage *job = new cMessage(msgname);
job->setBitLength((long) *msgLength);
job->setTimestamp();
send(job, "out");
// return to ACTIVE
FSM_Goto(fsm,ACTIVE);
break;
}
}
}
4.11 Navigating the Module Hierarchy¶
4.11.1 Module Vectors¶
If a module is part of a module vector, the getIndex() and getVectorSize() member functions can be used to query its index and the vector size:
EV << "This is module [" << module->getIndex() <<
"] in a vector of size [" << module->getVectorSize() << "].\n";
4.11.2 Component IDs¶
Every component (module and channel) in the network has an ID that can be obtained from cComponent's getId() member function:
int componentId = getId();
An ID uniquely identifies a module or channel for the whole duration of the simulation. This holds even when modules are created and destroyed dynamically because IDs of deleted modules or channels are never reused for newly created ones.
To look up a component by ID, one needs to use methods of the simulation manager object, cSimulation. getComponent() expects an ID and returns the component's pointer if the component still exists. Otherwise, it returns nullptr. The method has two variations, getModule(id) and getChannel(id). They return cModule and cChannel pointers if the identified component is, in fact, a module or channel, respectively. Otherwise, they return nullptr.
int id = 100; cModule *mod = getSimulation()->getModule(id); // exists, and is a module
4.11.3 Walking Up and Down the Module Hierarchy¶
The parent module can be accessed by the getParentModule() member function:
cModule *parent = getParentModule();
For example, the parameters of the parent module are accessed like this:
double timeout = getParentModule()->par("timeout");
cModule's findSubmodule() and getSubmodule() member functions make it possible to look up the module's submodules by name (or name and index if the submodule is in a module vector). The first one returns the module ID of the submodule, and the latter returns the module pointer. If the submodule is not found, they return -1 or nullptr, respectively.
int submodID = module->findSubmodule("foo", 3); // look up "foo[3]"
cModule *submod = module->getSubmodule("foo", 3);
4.11.4 Finding Modules by Path¶
cModule's getModuleByPath() member function can be used to
find modules by relative or absolute path. It accepts a path string and
returns the pointer of the matching module or throws an exception if it
was not found. If it is not known in advance whether the module exists,
its companion function findModuleByPath() can be used.
findModuleByPath() returns nullptr if the module
identified by the path does not exist but otherwise behaves identically
to getModuleByPath().
- [findModuleByPath() was
introduced in OMNeT++ 6.0. In previous versions, getModuleByPath()
returned nullptr if there was no matching module.]
The path is a dot-separated list of module names. The special module name, ^ (caret), stands for the parent module. If the path starts with a dot or caret, it is understood as relative to this module. Otherwise, it is taken to mean an absolute path. For absolute paths, inclusion of the toplevel module's name in the path is optional. The toplevel module itself may be referred to as <root>.
The following lines demonstrate relative paths. They find the app[3] submodule and the gen submodule of the app[3] submodule of the module in question:
cModule *app = module->getModuleByPath(".app[3]"); // note leading dot
cModule *gen = module->getModuleByPath(".app[3].gen");
Without the leading dot, the path is interpreted as absolute. The following lines both find the tcp submodule of host[2] in the network, regardless of the module on which the getModuleByPath() has been invoked.
cModule *tcp = module->getModuleByPath("Network.host[2].tcp");
cModule *tcp = module->getModuleByPath("host[2].tcp");
The parent module may be expressed with a caret:
cModule *parent = module->getModuleByPath("^"); // parent module
cModule *tcp = module->getModuleByPath("^.tcp"); // sibling module
cModule *other = module->getModuleByPath("^.^.host[1].tcp"); // two levels up, then...
4.11.5 Iterating over Submodules¶
To access all modules within a compound module, one can use cModule::SubmoduleIterator.
for (cModule::SubmoduleIterator it(module); !it.end(); it++) {
cModule *submodule = *it;
EV << submodule->getFullName() << endl;
}
4.11.6 Navigating Connections¶
To determine the module at the other end of a connection, use cGate's getPreviousGate(), getNextGate(), and getOwnerModule() methods. An example:
cModule *neighbour = gate("out")->getNextGate()->getOwnerModule();
For input gates, use getPreviousGate() instead of getNextGate().
The endpoints of the connection path are returned by the getPathStartGate() and getPathEndGate() cGate methods. These methods follow the connection path by repeatedly calling getPreviousGate() and getNextGate(), respectively, until they arrive at a nullptr. An example:
cModule *peer = gate("out")->getPathEndGate()->getOwnerModule();
4.12 Direct Method Calls Between Modules¶
In some simulation models, there might be modules that are too tightly coupled for message-based communication to be efficient. In such cases, the solution might be to call one simple module's public C++ methods from another module.
Simple modules are C++ classes, so normal C++ method calls will work. However, two issues need to be mentioned:
- how to obtain a pointer to the object representing the module;
- how to inform the simulation kernel that a method call across modules is taking place.
Typically, the called module is in the same compound module as the caller, so the getParentModule() and getSubmodule() methods of cModule can be used to obtain a cModule* pointer to the called module. (Further ways to obtain the pointer are described in section [4.11]). The cModule* pointer then has to be cast to the actual C++ class of the module, so that its methods become visible.
This can be achieved using the following code:
cModule *targetModule = getParentModule()->getSubmodule("foo");
Foo *target = check_and_cast<Foo *>(targetModule);
target->doSomething();
The check_and_cast<>() template function on the second line
is part of OMNeT++. It performs a standard C++ dynamic_cast and checks
the result: if it is nullptr, check_and_cast raises an OMNeT++ error.
Using check_and_cast saves you from writing error checking code:
if targetModule from the first line is nullptr because
the submodule named "foo" was not found, or if that
module is actually not of type Foo, an exception is thrown
from check_and_cast with an appropriate error message.
- [A
check_and_cast_nullable<>() function also exists. It
accepts nullptr as input and only complains if the cast goes wrong.]
The second issue is how to inform the simulation kernel that a method call across modules is taking place. Why is this necessary in the first place? First, the simulation kernel always needs to know which module's code is currently executing in order for ownership handling and other internal mechanisms to work correctly. Second, the Qtenv simulation GUI can animate method calls, but to be able to do that, it needs to know about them. Third, method calls are also recorded in the event log.
The solution is to add the Enter_Method() or Enter_Method_Silent() macro at the beginning of the methods that may be invoked from other modules. These calls perform context switching and, in the case of Enter_Method(), notify the simulation GUI so that animation of the method call can take place. Enter_Method_Silent() does not animate the method call, but otherwise, it is equivalent to Enter_Method(). Both macros accept a printf()-like argument list (it is optional for Enter_Method_Silent()), which should produce a string with the method name and the actual arguments as much as possible. The string is displayed in the animation (Enter_Method() only) and recorded into the event log.
void Foo::doSomething()
{
Enter_Method("doSomething()");
...
}
4.13 Dynamic Module Creation¶
4.13.1 When To Use¶
Certain simulation scenarios require the ability to dynamically create and destroy modules. For example, simulating the arrival and departure of new users in a mobile network may be implemented in terms of adding and removing modules during the course of the simulation. Loading and instantiating network topology (i.e. nodes and links) from a data file is another common technique enabled by dynamic module (and link) creation.
OMNeT++ allows both simple and compound modules to be created at runtime. When instantiating a compound module, its full internal structure (submodules and internal connections) is reproduced.
Once created and started, dynamic modules are no different from “static” modules.
4.13.2 Overview¶
To understand how dynamic module creation works, you have to know a bit about how OMNeT++ normally instantiates modules. Each module type (class) has a corresponding factory object of the class cModuleType. This object is created under the hood by the Define_Module() macro, and it has a factory method which can instantiate the module class (this function basically only consists of a return new <moduleclass>(...) statement).
The cModuleType object can be looked up by its name string (which is the same as the module class name). Once you have its pointer, it is possible to call its factory method and create an instance of the corresponding module class -- without having to include the C++ header file containing the module's class declaration into your source file.
The cModuleType object also knows what gates and parameters the given module type has to have. (This information comes from NED files.)
Simple modules can be created in one step. For a compound module, the situation is more complicated because its internal structure (submodules, connections) may depend on parameter values and gate vector sizes. Thus, for compound modules, it is generally required to first create the module itself, second, set parameter values and gate vector sizes, and then call the method that creates its submodules and internal connections.
As you already know, simple modules with activity() need a starter message. For statically created modules, this message is created automatically by OMNeT++, but for dynamically created modules, you have to do this explicitly by calling the appropriate functions.
Calling initialize() has to take place after insertion of the starter messages because the initializing code may insert new messages into the FES, and these messages should be processed after the starter message.
4.13.3 Creating Modules¶
The first step is to find the factory object. The cModuleType::get() function expects a fully qualified NED type name and returns the factory object:
cModuleType *moduleType = cModuleType::get("foo.nodes.WirelessNode");
The return value does not need to be checked for nullptr because the function raises an error if the requested NED type is not found. (If this behavior is not what you need, you can use the similar cModuleType::find() function, which returns nullptr if the type was not found.)
4.13.3.1 The All-in-One Method¶
cModuleType has a createScheduleInit(const char *name, cModule *parentmod) % don't break this line (for html) convenience function to get a module up and running in one step.
cModule *mod = moduleType->createScheduleInit("node", this);
createScheduleInit() performs the following steps: create(), finalizeParameters(), buildInside(), scheduleStart(now), and callInitialize().
This method can be used for both simple and compound modules. Its applicability is somewhat limited, however: because it does everything in one step, you do not have the chance to set parameters or gate sizes, and to connect gates before initialize() is called. (initialize() expects all parameters and gates to be in place and the network fully built when it is called.) Because of the above limitation, this function is mainly useful for creating basic simple modules.
4.13.3.2 The Detailed Procedure¶
If the createScheduleInit() all-in-one method is not applicable, one needs to use the full procedure. It consists of five steps:
- Find the factory object;
- Create the module;
- Set up its parameters and gate sizes as needed;
- Tell the (possibly compound) module to recursively create its internal submodules and connections;
- Schedule activation message(s) for the new simple module(s).
Each step (except for Step 3.) can be done with one line of code.
See the following example, where Step 3 is omitted:
// find factory object
cModuleType *moduleType = cModuleType::get("foo.nodes.WirelessNode");
// create (possibly compound) module and build its submodules (if any)
cModule *module = moduleType->create("node", this);
module->finalizeParameters();
module->buildInside();
// create activation message
module->scheduleStart(simTime());
If you want to set up parameter values or gate vector sizes (Step 3.), the code goes between the create() and buildInside() calls:
// create
cModuleType *moduleType = cModuleType::get("foo.nodes.WirelessNode");
cModule *module = moduleType->create("node", this);
// set up parameters and gate sizes before we set up its submodules
module->par("address") = ++lastAddress;
module->finalizeParameters();
module->setGateSize("in", 3);
module->setGateSize("out", 3);
// create internals, and schedule it
module->buildInside();
module->scheduleStart(simTime());
4.13.4 Deleting Modules¶
To delete a module dynamically, use cModule's deleteModule() member function:
module->deleteModule();
If the module was a compound module, this involves recursively deleting all its submodules. An activity()-based simple module can also delete itself; in that case, the deleteModule() call does not return to the caller.
4.13.5 The preDelete() method¶
When deleteModule() is called on a compound module, individual modules under the compound module are notified by calling their preDelete() member functions before any change is actually made.
This notification can be quite useful when the compound module contains modules that hold pointers to each other, necessitated by their complex interactions via C++ method calls. With such modules, destruction can be tricky: given a sufficiently complex control flow involving cascading cross-module method calls and signal listeners, it is actually quite easy to accidentally invoke a method on a module that has already been deleted at that point, resulting in a crash. (Note that destructors of collaborating modules cannot rely on being invoked in any particular order because that order is determined factors, e.g. submodule order in NED, which are out of the control of the C++ code.)
preDelete() is a cComponent virtual method that, similar to handleMessage() and initialize(), is intended for being overridden by the user. When a compound module is deleted, deleteModule() first invokes preDelete() recursively on the submodule tree and only starts deleting modules after that. This gives a chance to modules that override preDelete() to set pointers to collaborating modules to nullptr, or otherwise ensure that nothing bad will happen once modules start being deleted.
preDelete() receives an argument: the pointer of the module on which deleteModule() was invoked. This allows the module to tell apart cases when, for example, it is deleted itself or as part of a larger unit.
An example:
void Foo::preDelete(cComponent *root)
{
barModule = nullptr;
}
4.13.6 Component Weak Pointers¶
opp_component_ptr<T> offers an answer to a related problem: how to detect when a module we have a pointer to is deleted, so that we no longer try to access it.
opp_component_ptr<T> is a smart pointer that points to a cComponent object (i.e. a module or a channel) and automatically becomes nullptr when the referenced object is deleted. It is a non-owning (“weak”) pointer, i.e. the pointer going out of scope has no effect on the referenced object.
In practice, one would replace bare pointers in the code (for example, Foo*) with opp_component_ptr<Foo> smart pointers and test before accessing the other module that the pointer is still valid.
An example:
opp_component_ptr<Foo> fooModule; // as class member
if (fooModule)
fooModule->doSomething();
// or: obtain a bare pointer for multiple use
if (Foo *fooPtr = fooModule.get()) {
fooPtr->doSomething();
fooPtr->doSomethingElse();
}
4.13.7 Module Deletion and finish()¶
finish() is called for all modules at the end of the simulation, no matter how the modules were created. If a module is dynamically deleted before that, finish() will not be invoked (deleteModule() does not do it). However, you can still manually invoke it before deleteModule().
You can use the callFinish() function to invoke finish()
(It is not a good idea to invoke finish() directly). If you are
deleting a compound module, callFinish() will recursively invoke
finish() for all submodules, and if you are deleting a simple
module from another module, callFinish() will do the context switch
for the duration of the call.
- [The finish() function has even been made protected
in cSimpleModule, in order to discourage its invocation from
other modules.]
Example:
mod->callFinish(); mod->deleteModule();
4.13.8 Creating Connections¶
Connections can be created using cGate's connectTo() method. connectTo() should be invoked on the source gate of the connection and expects the destination gate pointer as an argument. The use of the words source and destination correspond to the direction of the arrow in NED files.
srcGate->connectTo(destGate);
connectTo() also accepts a channel object (cChannel*) as an additional, optional argument. Similarly to modules, channels can be created using their factory objects that have the type cChannelType:
cGate *outGate, *inGate;
...
// find factory object and create a channel
cChannelType *channelType = cChannelType::get("foo.util.Channel");
cChannel *channel = channelType->create("channel");
// create connecting
outGate->connectTo(inGate, channel);
The channel object will be owned by the source gate of the connection, and one cannot reuse the same channel object with several connections.
Instantiating one of the built-in channel types (cIdealChannel, cDelayChannel, or cDatarateChannel) is somewhat simpler because those classes have static create() factory functions and the step of finding the factory object can be spared. Alternatively, one can use cChannelType's createIdealChannel(), createDelayChannel(), and createDatarateChannel() static methods.
The channel object may need to be parameterized before using it for a connection. For example, cDelayChannel has a setDelay() method, and cDatarateChannel has setDelay(), setDatarate(), setBitErrorRate(), and setPacketErrorRate().
An example that sets up a channel with a datarate and a delay between two modules:
cDatarateChannel *datarateChannel = cDatarateChannel::create("channel");
datarateChannel->setDelay(0.001);
datarateChannel->setDatarate(1e9);
outGate->connectTo(inGate, datarateChannel);
Finally, here is a more complete example that creates two modules and connects them in both directions:
cModuleType *moduleType = cModuleType::get("TicToc");
cModule *a = modtype->createScheduleInit("a", this);
cModule *b = modtype->createScheduleInit("b", this);
a->gate("out")->connectTo(b->gate("in"));
b->gate("out")->connectTo(a->gate("in"));
4.13.9 Removing Connections¶
The disconnect() method of cGate can be used to remove connections. This method has to be invoked on the source side of the connection. It also destroys the channel object associated with the connection if one has been set.
srcGate->disconnect();
4.14 Signals¶
This section describes simulation signals, or signals for short. Signals are a versatile concept that first appeared in OMNeT++ 4.1.
Simulation signals can be used for:
- exposing statistical properties of the model, without specifying whether and how to record them
- receiving notifications about simulation model changes at runtime, and acting upon them
- implementing a publish-subscribe style communication among modules; this is advantageous when the producer and consumer of the information do not know about each other, and possibly there is a many-to-one or many-to-many relationship among them
- emitting information for other purposes, for example as input for custom animation effects
Signals are emitted by components (modules and channels). Signals propagate on the module hierarchy up to the root. At any level, one can register listeners, that is, objects with callback methods. These listeners will be notified (their appropriate methods called) whenever a signal value is emitted. The result of upwards propagation is that listeners registered at a compound module can receive signals from all components in that submodule tree. A listener registered at the system module can receive signals from the whole simulation.
- NOTE
A channel's parent is the (compound) module that contains the connection, not the owner of either gate the channel is connected to.
Signals are identified by signal names (i.e. strings), but for efficiency, at runtime we use dynamically assigned numeric identifiers (signal IDs, typedef'd as simsignal_t). The mapping of signal names to signal IDs is global, so all modules and channels asking to resolve a particular signal name will get back the same numeric signal ID.
Listeners can subscribe to signal names or IDs, regardless of their source. For example, if two different and unrelated module types, say Queue and Buffer, both emit a signal named "length", then a listener that subscribes to "length" at some higher compound module will get notifications from both Queue and Buffer module instances. The listener can still look at the source of the signal if it wants to distinguish the two (it is available as a parameter to the callback function), but the signals framework itself does not have such a feature.
- NOTE
Because the component type that emits the signal is not part of the signal's identity, it is advised to choose signal names carefully. A good naming scheme facilitates the “merging” of signals that arrive from different sources but mean the same thing, and reduces the chance of collisions between signals that accidentally have the same name but represent different things.
When a signal is emitted, it can carry a value with it. There are multiple overloaded versions of the emit() method for different data types, and also overloaded receiveSignal() methods in listeners. The signal value can be of selected primitive types, or an object pointer; anything that is not feasible to emit as a primitive type may be wrapped into an object and emitted as such.
Even when the signal value is of a primitive type, it is possible to convey extra information to listeners via an additional details object, which is an optional argument of emit().
4.14.1 Design Considerations and Rationale¶
The implementation of signals is based on the following assumptions:
- subscribe/unsubscribe operations are rare compared to emit() calls, so it is emit() that needs to be efficient
- the signals mechanism is present in every module, so per-module memory overhead must be kept as low as possible
- it is expected that modules and channels will be heavily instrumented with signals, and only a subset of signals will actually be used (will have listeners) in any particular simulation; therefore, the CPU and memory overhead of momentarily unused signals must be as low as possible
These goals have been achieved in the 4.1 version with the following implementation. First, the data structure that used to store listeners in components is dynamically allocated, so if there are no listeners, the per-component overhead is only the size of the pointer (which will be nullptr then).
Second, additionally there are two bitfields in every component that store
which one of the first 64 signals (IDs 0..63) have local listeners and
listeners in ancestor modules.
- [It is assumed that there will be
typically less than 64 frequently used signals used at a time in a
simulation.]
4.14.2 The Signals Mechanism¶
Signal-related methods are declared on cComponent, so they are available for both cModule and cChannel.
4.14.2.1 Signal IDs¶
Signals are identified by names, but internally, numeric signal IDs are used for efficiency. The registerSignal() method takes a signal name as a parameter and returns the corresponding simsignal_t value. The method is static, illustrating the fact that signal names are global. An example:
simsignal_t lengthSignalId = registerSignal("length");
The getSignalName() method (also static) does the reverse: it accepts a simsignal_t and returns the name of the signal as a const char * (or nullptr for an invalid signal handle):
const char *signalName = getSignalName(lengthSignalId); // --> "length"
- NOTE
Since OMNeT++ 4.3, the lifetime of signal IDs is the entire program, and it is possible to call registerSignal() from initializers of global variables, e.g., static class members. In earlier versions, signal IDs were usually allocated in initialize() and were only valid for that simulation run.
4.14.2.2 Emitting Signals¶
The emit() family of functions emit a signal from the module or channel. emit() takes a signal ID (simsignal_t) and a value as parameters:
emit(lengthSignalId, queue.length());
The value can be of type bool, long, double, simtime_t, const char *, or (const) cObject *. Other types can be cast into one of these types or wrapped into an object subclassed from cObject.
emit() also has an extra, optional object pointer argument named
details, with the type cObject*. This argument may be used
to convey extra information to listeners.
- [The details
parameter was added in OMNeT++ 5.0.]
When there are no listeners, the runtime cost of emit() is usually minimal. However, if producing a value has a significant runtime cost, then the mayHaveListeners() or hasListeners() method can be used to check beforehand whether the given signal has any listeners at all. If not, producing the value and emitting the signal can be skipped.
Example usage:
if (mayHaveListeners(distanceToTargetSignal)) {
double d = sqrt((x-targetX)*(x-targetX) + (y-targetY)*(y-targetY));
emit(distanceToTargetSignal, d);
}
The mayHaveListeners() method is very efficient (a constant-time operation) but may return false positive. In contrast, hasListeners() will search up to the top of the module tree if the answer is not cached, so it is generally slower. We recommend that you take into account the cost of producing notification information when deciding between mayHaveListeners() and hasListeners().
4.14.2.3 Signal Declarations¶
Since OMNeT++ 4.4, signals can be declared in NED files for documentation purposes, and OMNeT++ can check that only declared signals are emitted, and that they actually conform to the declarations (with regard to the data type, etc.)
The following example declares a queue module that emits a signal named queueLength:
simple Queue
{
parameters:
@signal[queueLength](type=long);
...
}
Signals are declared with the @signal property on the module or channel that emits it. (NED properties are described in [3.12]). The property index corresponds to the signal name, and the property's body may declare various attributes of the signal; currently only the data type is supported.
The type property key is optional; when present, its value should be bool, long, unsigned long, double, simtime_t, string, or a registered class name optionally followed by a question mark. Classes can be registered using the Register_Class() or Register_Abstract_Class() macros; these macros create a cObjectFactory instance, and the simulation kernel will call cObjectFactory's isInstance() method to check that the emitted object is really a subclass of the declared class. isInstance() just wraps a C++ dynamic_cast.)
A question mark after the class name means that the signal is allowed to emit nullptr pointers. For example, a module named PPP may emit the frame (packet) object every time it starts transmitting and emit nullptr when the transmission is completed:
simple PPP
{
parameters:
@signal[txFrame](type=PPPFrame?); // a PPPFrame or nullptr
...
}
The property index may contain wildcards, which is important for declaring signals whose names are only known at runtime. For example, if a module emits signals called session-1-seqno, session-2-seqno, session-3-seqno, etc., those signals can be declared as:
@signal[session-*-seqno]();
4.14.2.4 Enabling/Disabling Signal Checking¶
Starting with OMNeT++ 5.0, signal checking is turned on by default when the simulation kernel is compiled in debug mode, requiring all signals to be declared with @signal. (It is turned off in release-mode simulation kernels due to performance reasons.)
If needed, signal checking can be disabled with the check-signals configuration option:
check-signals = false
4.14.2.5 Signal Data Objects¶
When emitting a signal with a cObject* pointer, you can pass as data an object that you already have in the model, provided you have a suitable object at hand. However, it is often necessary to declare a custom class to hold all the details, and fill in an instance just for the purpose of emitting the signal.
The custom notification class must be derived from cObject. We recommend that you also add noncopyable as a base class, because then you don't need to write a copy constructor, assignment operator, and dup() function, sparing some work. When emitting the signal, you can create a temporary object and pass its pointer to the emit() function.
An example of custom notification classes are the ones associated with model change notifications (see [4.14.3]). For example, the data class that accompanies a signal that announces that a gate or gate vector is about to be created looks like this:
class cPreGateAddNotification : public cObject, noncopyable
{
public:
cModule *module;
const char *gateName;
cGate::Type gateType;
bool isVector;
};
And the code that emits the signal:
if (hasListeners(PRE_MODEL_CHANGE))
{
cPreGateAddNotification tmp;
tmp.module = this;
tmp.gateName = gatename;
tmp.gateType = type;
tmp.isVector = isVector;
emit(PRE_MODEL_CHANGE, &tmp);
}
4.14.2.6 Subscribing to Signals¶
The subscribe() method registers a listener for a signal. Listeners are objects that extend the cIListener class. The same listener object can be subscribed to multiple signals. subscribe() has two arguments: the signal and a pointer to the listener object:
cIListener *listener = ...;
simsignal_t lengthSignalId = registerSignal("length");
subscribe(lengthSignalId, listener);
For convenience, the subscribe() method has a variant that takes the signal name directly, so the registerSignal() call can be omitted:
cIListener *listener = ...;
subscribe("length", listener);
One can also subscribe at other modules, not only the local one. For example, to get signals from all parts of the model, one can subscribe at the system module level:
cIListener *listener = ...;
getSimulation()->getSystemModule()->subscribe("length", listener);
The unsubscribe() method has the same parameter list as subscribe() and unregisters the given listener from the signal:
unsubscribe(lengthSignalId, listener);
or
unsubscribe("length", listener);
It is an error to subscribe the same listener to the same signal twice.
It is possible to test whether a listener is subscribed to a signal using the isSubscribed() method, which also takes the same parameter list.
if (isSubscribed(lengthSignalId, listener)) {
...
}
For completeness, there are methods for getting the list of signals that the component has subscribed to (getLocalListenedSignals()) and the list of listeners for a given signal (getLocalSignalListeners()). The former returns a std::vector<simsignal_t>; the latter takes a signal ID (simsignal_t) and returns a std::vector<cIListener*>.
The following example prints the number of listeners for each signal:
EV << "Signal listeners:\n";
std::vector<simsignal_t> signals = getLocalListenedSignals();
for (unsigned int i = 0; i < signals.size(); i++) {
simsignal_t signalID = signals[i];
std::vector<cIListener*> listeners = getLocalSignalListeners(signalID);
EV << getSignalName(signalID) << ": " << listeners.size() << " signals\n";
}
4.14.2.7 Listeners¶
Listeners are objects that subclass from the cIListener class, which declares the following methods:
class cIListener
{
public:
virtual ~cIListener() {}
virtual void receiveSignal(cComponent *src, simsignal_t id,
bool value, cObject *details) = 0;
virtual void receiveSignal(cComponent *src, simsignal_t id,
intval_t value, cObject *details) = 0;
virtual void receiveSignal(cComponent *src, simsignal_t id,
uintval_t value, cObject *details) = 0;
virtual void receiveSignal(cComponent *src, simsignal_t id,
double value, cObject *details) = 0;
virtual void receiveSignal(cComponent *src, simsignal_t id,
simtime_t value, cObject *details) = 0;
virtual void receiveSignal(cComponent *src, simsignal_t id,
const char *value, cObject *details) = 0;
virtual void receiveSignal(cComponent *src, simsignal_t id,
cObject *value, cObject *details) = 0;
virtual void finish(cComponent *component, simsignal_t id) {}
virtual void subscribedTo(cComponent *component, simsignal_t id) {}
virtual void unsubscribedFrom(cComponent *component, simsignal_t id) {}
};
This class has a number of virtual methods:
- Several overloaded receiveSignal() methods, one for each data type. Whenever a signal is emitted (via emit()), the matching receiveSignal() method is invoked on the subscribed listeners.
- finish() is called by a component on its local listeners after the component's finish() method was called. If the listener is subscribed to multiple signals or at multiple components, the method will be called multiple times. Note that finish() methods in general are not invoked if the simulation terminates with an error, so that method is not a place for doing cleanup.
- subscribedTo(), unsubscribedFrom() are called when this listener object is subscribed/unsubscribed to (from) a signal. These methods give the opportunity for listeners to track whether and where they are subscribed. It is also OK for a listener to delete itself in the last statement of the unsubscribedFrom() method, but you must be sure that there are no other places the same listener is still subscribed.
Since cIListener has a large number of pure virtual methods, it is more convenient to subclass from cListener, a do-nothing implementation instead. It defines finish(), subscribedTo(), and unsubscribedFrom() with an empty body, and the receiveSignal() methods with bodies that throw a "Data type not supported" error. You can redefine the receiveSignal() method(s) whose data type you want to support, and signals emitted with other (unexpected) data types will result in an error instead of going unnoticed.
The order in which listeners will be notified is undefined (it is not necessarily the same order in which listeners were subscribed.)
4.14.2.8 Listener Life Cycle¶
When a component (module or channel) is deleted, it automatically unsubscribes (but does not delete) the listeners it has. When a module is deleted, it first unsubscribes all listeners from all modules and channels in its submodule tree before starting to recursively delete the modules and channels themselves.
When a listener is deleted, it automatically unsubscribes from all components
it is subscribed to.
- [This behavior is new in OMNeT++ 6.0. Prior versions
mandated that the listener be already unsubscribed from all places when its
destructor runs, but did not automatically unsubscribe.]
- NOTE
If your module has added listeners to other modules (e.g., the top-level module), these listeners must be unsubscribed in the module destructor at the latest. Remember to make sure the modules still exist before you call unsubscribe() on them, unless they are an ancestor of your module in the module tree.
4.14.3 Listening to Model Changes¶
In simulation models, it is often useful to hold references to other modules, a connecting channel, or other objects, or to cache information derived from the model topology. However, such pointers or data may become invalid when the model changes at runtime and need to be updated or recalculated. The problem is how to get notification that something has changed in the model.
- NOTE
Whenever you see a cModule*, cChannel*, cGate*, or similar pointer kept as state in a simple module, you should think about how it will be kept up-to-date if the model changes at runtime.
The solution is, of course, signals. OMNeT++ has two built-in signals, PRE_MODEL_CHANGE and POST_MODEL_CHANGE (these macros are simsignal_t values, not names) that are emitted before and after each model change.
Pre/post model change notifications are emitted with data objects that carry the details of the change. The data classes are:
- cPreModuleAddNotification / cPostModuleAddNotification
- cPostModuleBuildNotification
- cPostComponentInitializeNotification
- cPreModuleDeleteNotification / cPostModuleDeleteNotification
- cPreModuleReparentNotification / cPostModuleReparentNotification
- cPreGateAddNotification / cPostGateAddNotification
- cPreGateDeleteNotification / cPostGateDeleteNotification
- cPreGateVectorResizeNotification / cPostGateVectorResizeNotification
- cPreGateConnectNotification / cPostGateConnectNotification
- cPreGateDisconnectNotification / cPostGateDisconnectNotification
- cPrePathCreateNotification / cPostPathCreateNotification
- cPrePathCutNotification / cPostPathCutNotification
- cPreParameterChangeNotification / cPostParameterChangeNotification
- cPreDisplayStringChangeNotification / cPostDisplayStringChangeNotification
They all subclass from cModelChangeNotification, which is, of course, a cObject. Inside the listener, you can use dynamic_cast<> to figure out what notification arrived.
- NOTE
Please look up these classes in the API documentation to see their data fields, when exactly they get fired, and what one needs to be careful about when using them.
An example listener that prints a message when a module is deleted:
class MyListener : public cListener
{
...
};
void MyListener::receiveSignal(cComponent *src, simsignal_t id, cObject *value,
cObject *details)
{
if (dynamic_cast<cPreModuleDeleteNotification *>(value)) {
cPreModuleDeleteNotification *data = (cPreModuleDeleteNotification *)value;
EV << "Module " << data->module->getFullPath() << " is about to be deleted\n";
}
}
If you'd like to get notification about the deletion of any module, you need to install the listener on the system module:
getSimulation()->getSystemModule()->subscribe(PRE_MODEL_CHANGE, listener);
- NOTE
PRE_MODEL_CHANGE and POST_MODEL_CHANGE are fired on the module (or channel) affected by the change, and not on the module which executes the code that causes the change. For example, pre-module-deleted is fired on the module to be removed, and post-module-deleted is fired on its parent (because the original module no longer exists), and not on the module that contains the deleteModule() call.
- NOTE
A listener will not receive pre/post-module-deleted notifications if the whole submodule tree that contains the subscription point is deleted. This is because compound module destructors begin by unsubscribing all modules/channels in the subtree before starting recursive deletion.
4.15 Signal-Based Statistics Recording¶
4.15.1 Motivation¶
One use of signals is to expose variables for result collection without specifying where, how, and whether to record them. With this approach, modules only publish the variables, and the actual result recording takes place in listeners. Listeners may be added by the simulation framework (based on the configuration) or by other modules (for example, by dedicated result collection modules).
The signals approach allows for several possibilities:
- Provides a controllable level of detail: in some simulation runs, you may want to record all values as a time series; in other runs, you may only want to record the mean, time average, minimum/maximum value, standard deviation, etc.; and in yet other runs, you may want to record the distribution as a histogram.
- Depending on the purpose of the simulation experiment, you may want to process the results before recording them. For example, you may want to record a smoothed or filtered value, the percentage of time the value is nonzero or over a threshold, the sum of the values, etc.
- You may want aggregate statistics, such as recording the total number of packet drops or the average end-to-end delay for the entire network.
- You may want to record combined statistics, for example, a drop percentage (drop count/total number of packets).
- You may want to ignore results generated during the warm-up period or during other transients.
The signals approach can fulfill the above goals.
4.15.2 Declaring Statistics¶
4.15.2.1 Introduction¶
In order to record simulation results based on signals, you need to add @statistic properties to the NED definition of the simple module or channel. A @statistic property defines the name of the statistic, which signal(s) are used as input, what processing steps are to be applied to them (e.g., smoothing, filtering, summing, differential quotient), and what properties are to be recorded (minimum, maximum, average, etc.) and in which form (vector, scalar, histogram). Record items can be marked optional, which allows you to denote a “default” and a more comprehensive “all” result set to be recorded. The list of record items can be further tweaked from the configuration. You can also specify a descriptive name (“title”) for the statistic, as well as a measurement unit.
The following example declares a queue module with a queue length statistic:
simple Queue
{
parameters:
@statistic[queueLength](record=max,timeavg,vector?);
gates:
input in;
output out;
}
As you can see, statistics are represented with indexed NED properties (see [3.12]). The property name is always statistic, and the index (here, queueLength) is the name of the statistic. The property value, that is, everything inside the parentheses, provides hints and extra information for recording.
The above @statistic declaration assumes that the module's C++ code emits the queue's updated length as signal queueLength whenever elements are inserted into the queue or removed from it. By default, the maximum and the time average of the queue length will be recorded as scalars. You can also instruct the simulation to record “all” results, which will turn on optional record items marked with a question mark. In this case, the queue lengths will also be recorded into an output vector.
- NOTE
The configuration lets you fine-tune the list of result items even beyond the default and all settings. See section [12.2.3] for more information.
In the above example, the signal to be recorded was taken from the statistic name. However, if this is not suitable, you can use the source property key to specify a different signal as input for the statistic. The following example assumes that the C++ code emits a qlen signal and declares a queueLength statistic based on that:
simple Queue
{
parameters:
@signal[qlen](type=int); // optional
@statistic[queueLength](source=qlen; record=max,timeavg,vector?);
...
}
Note that the source=qlen property key has been added to specify the qlen signal as the input for the statistic. Additionally, a signal declaration (@signal property) has been added for the qlen signal. Although signal declarations are currently optional and ignored by the system, it is good practice to include them.
You can also apply processing to a signal before recording it. Consider the following example:
@statistic[dropCount](source=count(drop); record=last,vector?);
This records the total number of packet drops as a scalar and, optionally, the number of packets dropped over time as a vector. This assumes that the C++ code emits a drop signal every time a packet is dropped. Here, count() is a result filter.
- NOTE
Starting from OMNeT++ 4.4, items containing parentheses (e.g., count(drop)) no longer need to be enclosed in quotation marks.
Another example:
@statistic[droppedBytes](source=sum(packetBytes(pkdrop)); record=last,vector?);
This assumes that the C++ code emits a pkdrop signal with a cPacket pointer as the value. Based on that signal, it records the total number of bytes dropped as a scalar and optionally as a vector. The packetBytes() filter extracts the number of bytes from each packet using the getByteLength() method in cPacket, and the sum() filter sums up the values.
Arithmetic expressions can also be used. For example, the following line computes the number of dropped bytes using the packetBits() filter:
@statistic[droppedBytes](source=sum(8*packetBits(pkdrop)); record=last, vector?);
The source can also combine multiple signals in an arithmetic expression:
@statistic[dropRate](source=count(drop)/count(pk); record=last,vector?);
When using multiple signals, a value arriving on either signal will result in one output value. The computation will use the last values of the other signals (sample-hold interpolation). However, the same signal cannot occur twice, as it would cause glitches in the output.
Record items can also be expressions and contain filters. For example, the following statistic is equivalent to one of the previous examples. It computes and records the total number of bytes dropped, using a cPacket*-valued signal as input. However, some of the computations have been moved to the recorder part.
@statistic[droppedBytes](source=packetBits(pkdrop); record=last(8*sum), vector(8*sum)?);
4.15.2.2 Property Keys¶
The following keys are understood in @statistic properties:
- source : Defines the input for the recorders (see the record= key). If omitted, the statistic name is taken as the signal name.
- record : Contains a list of recording modes, separated by commas. Recording modes define how to record the source (see the source= key).
- title : A longer, descriptive name for the statistic signal. Result visualization tools may use it as the chart label (e.g., in the legend).
- unit : The unit of measurement for the values. This may also appear in charts.
- interpolationmode : Defines how to interpolate signal values where needed (e.g., for drawing). Possible values are none, sample-hold, backward-sample-hold, linear.
- enum : Defines symbolic names for various integer signal values. The property value must be a string containing name=value pairs separated by commas. For example: "IDLE=1,BUSY=2,DOWN=3".
4.15.2.3 Available Filters and Recorders¶
The following table contains a list of predefined result filters. All filters in the table output a value for each input value.
|
Filter | Description |
| count | Computes and outputs the count of values received so far. |
| sum | Computes and outputs the sum of values received so far. |
| min | Computes and outputs the minimum of values received so far. |
| max | Computes and outputs the maximum of values received so far. |
| mean | Computes and outputs the average (sum / count) of values received so far. |
| timeavg | Regards the input values and their timestamps as a step function (sample-hold style), and computes and outputs their time average (integral divided by duration). |
| constant0 | Outputs a constant 0 for each received value (independent of the value). |
| constant1 | Outputs a constant 1 for each received value (independent of the value). |
| packetBits | Expects cPacket pointers as values and outputs the bit length for each received one. Non-cPacket values are ignored. |
| packetBytes | Expects cPacket pointers as values and outputs the byte length for each received one. Non-cPacket values are ignored. |
| sumPerDuration | For each value, computes the sum of values received so far, divides it by the duration, and outputs the result. |
| removeRepeats | Removes repeated values, i.e., discards values that are the same as the previous one. |
The list of predefined result recorders:
|
Recorder | Description |
| last | Records the last value into an output scalar. |
| count | Records the count of the input values into an output scalar; functionally equivalent to last(count). |
| sum | Records the sum of the input values into an output scalar (or zero if there were none); functionally equivalent to last(sum). |
| min | Records the minimum of the input values into an output scalar (or positive infinity if there were none); functionally equivalent to last(min). |
| max | Records the maximum of the input values into an output scalar (or negative infinity if there were none); functionally equivalent to last(max). |
| mean | Records the mean of the input values into an output scalar (or NaN if there were none); functionally equivalent to last(mean). |
| timeavg | Regards the input values with their timestamps as a step function (sample-hold style), and records the time average of the input values into an output scalar; functionally equivalent to last(timeavg). |
| stats | Computes basic statistics (count, mean, std.dev, min, max) from the input values, and records them into the output scalar file as a statistic object. |
| histogram | Computes a histogram and basic statistics (count, mean, std.dev, min, max) from the input values, and records the result into the output scalar file as a histogram object. |
| vector | Records the input values with their timestamps into an output vector. |
- NOTE
You can print the list of available result filters and result recorders by executing the opp_run -h resultfilters and opp_run -h resultrecorders commands.
4.15.2.4 Naming and Attributes of Recorded Results¶
The names of recorded result items are formed by concatenating the statistic name and the recording mode with a colon between them: "<statisticName>:<recordingMode>".
Thus, the following statistics
@statistic[dropRate](source=count(drop)/count(pk); record=last,vector?); @statistic[droppedBytes](source=packetBytes(pkdrop); record=sum,vector(sum)?);
will produce the following scalars: dropRate:last, droppedBytes:sum, and the following vectors: dropRate:vector, droppedBytes:vector(sum).
All property keys (except for record) are recorded as result attributes into the vector file or scalar file. The title property will be modified slightly before recording, by adding the recording mode after a comma. Otherwise, all result items saved from the same statistic would have exactly the same name. Examples: "Dropped Bytes, sum", "Dropped Bytes, vector(sum)".
It is allowed to use other property keys as well, but they won't be interpreted by the OMNeT++ runtime or the result analysis tool.
4.15.2.5 Source and Record Expressions in Detail¶
To fully understand source and record, it is useful to see how result recording is set up.
When a module or channel is created in the simulation, the OMNeT++ runtime checks the @statistic properties on its NED declaration and adds listeners to the signals mentioned as input. There are two types of listeners associated with result recording: result filters and result recorders. Result filters can be chained, and at the end of the chain, there is always a recorder. So, there may be a recorder directly subscribed to a signal, or there may be a chain of one or more filters plus a recorder. You can think of it as a pipeline or a “pipe tree”, where the tree roots are signals, the leaves are result recorders, and the intermediate nodes are result filters.
Result filters typically perform some processing on the values they receive on their inputs (from the previous filter in the chain or directly from the signal) and propagate them to their outputs (to chained filters and recorders). A filter may also discard values (i.e., not propagate them). Recorders may write the received values into an output vector or record output scalar(s) at the end of the simulation.
Many operations exist in both filter and recorder form. For example, the sum filter passes on the sum of the values received on its input to its output, while the sum recorder computes the sum of the received values to record it as an output scalar on simulation completion.
The next figure illustrates which filters and recorders are created and how they are connected for the following statistics:
@statistic[droppedBits](source=8*packetBytes(pkdrop); record=sum,vector(sum));

- HINT
To see how result filters and recorders are set up for a particular simulation, run the simulation with the debug-statistics-recording configuration option. For example, specify --debug-statistics-recording=true on the command line.
4.15.3 Demultiplexing Results with the Demux Filter¶
The demux result filter in OMNeT++ provides a mechanism for recording a breakdown of simulation results based on runtime attributes. It facilitates the separation of results into multiple streams or categories, leveraging the properties of emitted signals. This is particularly advantageous in scenarios with multiple interacting entities or modules.
The demux filter works by demultiplexing its input into several outputs, dynamically creating new outputs as required. The filter uses the name string of the details object associated with the emitted signal as the selector for this demultiplexing process. This capability enables dynamic categorization of statistics based on runtime conditions, such as signal sources.
Let's consider a practical example. Suppose we have a network simulation where a sink module receives packets from multiple senders. We'd like to separately record the total number of bytes received from each sender.
First, we define a sink module in NED, which is equipped with a signal and a statistic that uses the demux filter:
simple Sink {
@signal[packetReceived];
@statistic[bytesReceivedPerSender](source=packetReceived;record=sum(demux));
}
Next, we implement the sink module to emit a signal each time it receives a packet, tagging the emission with the sender's name:
class Sink : public cSimpleModule {
protected:
virtual void handleMessage(cMessage *msg) override {
if (msg->isPacket()) {
cPacket *pkt = check_and_cast<cPacket *>(msg);
static simsignal_t packetReceivedSignal = registerSignal("packetReceived");
const char *senderName = pkt->getSendingModule()->getFullName();
cNamedObject senderDetails(senderName);
emit(packetReceivedSignal, pkt->getByteLength(), &senderDetails);
delete msg;
}
}
};
With the demux filter, the generated statistic names will include the demux label (i.e., the sender's name), resulting in statistic names such as:
- bytesReceivedPerSender:Sender1:sum
- bytesReceivedPerSender:Sender2:sum
- ...
Each statistic records the sum of the bytes received from its corresponding sender, providing a detailed breakdown of the data volume by source.
4.15.4 Statistics Recording for Dynamically Registered Signals¶
It is often convenient to have a module record statistics per session, per connection, per client, etc. One way to handle this is by registering signals dynamically (e.g., session1-jitter, session2-jitter, ...), and setting up @statistic-style result recording for each.
The NED file would look like this:
@signal[session*-jitter](type=simtime_t); // note the wildcard @statisticTemplate[sessionJitter](record=mean,vector?);
In the C++ code of the module, you need to register each new signal with registerSignal() and, in addition, inform OMNeT++ to set up statistics recording for it as described by the @statisticTemplate property. This can be done by calling getEnvir()->addResultRecorders().
char signalName[32];
sprintf(signalName, "session%d-jitter", sessionNum);
simsignal_t signal = registerSignal(signalName);
char statisticName[32];
sprintf(statisticName, "session%d-jitter", sessionNum);
cProperty *statisticTemplate =
getProperties()->get("statisticTemplate", "sessionJitter");
getEnvir()->addResultRecorders(this, signal, statisticName, statisticTemplate);
In the @statisticTemplate property, the source key will be ignored (as the parameter signal will be used as the source). The actual name and index of the property will also be ignored. (In the case of @statistic, the index holds the result name, but here the name is explicitly specified in the statisticName parameter.)
When recording multiple signals using a common @statisticTemplate, you may want the titles of the recorded statistics to differ for each signal. This can be achieved by using dollar variables in the title key of the @statisticTemplate. The following variables are available:
- $name: name of the statistic
- $component: component's full path
- $mode: recording mode
- $namePart[0-9]+: the given part of the statistic name when split along colons (:); numbering starts with 1
For example, if the statistic name is "conn:host1-to-host4(3):bytesSent", and the title is "bytes sent in connection $namePart2", it will become "bytes sent in connection host1-to-host4(3)".
4.15.5 Adding Result Filters and Recorders Programmatically¶
As an alternative to using @statisticTemplate and addResultRecorders(), it is possible to set up result recording programmatically by creating and attaching result filters and recorders to the desired signals.
- NOTE
It is important to know that @statistic implements warm-up period support by including a special warm-up period filter at the front of the filter/recorder chain. When adding result filters and recorders manually, you need to add this filter manually as well.
The following code example sets up recording to an output vector after removing duplicate values. It is essentially equivalent to the following @statistic line:
@statistic[queueLength](source=qlen; record=vector(removeRepeats);
title="Queue Length"; unit=packets);
The C++ code:
simsignal_t signal = registerSignal("qlen");
cResultFilter *warmupFilter =
cResultFilterType::get("warmup")->create();
cResultFilter *removeRepeatsFilter =
cResultFilterType::get("removeRepeats")->create();
cResultRecorder *vectorRecorder =
cResultRecorderType::get("vector")->create();
opp_string_map *attrs = new opp_string_map;
(*attrs)["title"] = "Queue Length";
(*attrs)["unit"] = "packets";
cResultRecorder::Context ctx { this, "queueLength", "vector",
nullptr, attrs};
vectorRecorder->init(&ctx);
subscribe(signal, warmupFilter);
warmupFilter->addDelegate(removeRepeatsFilter);
removeRepeatsFilter->addDelegate(vectorRecorder);
4.15.6 Emitting Signals¶
Emitting signals for statistical purposes is not much different from emitting signals for any other purpose. Statistic signals are primarily expected to contain numeric values, so the overloaded emit() functions that take long, double, and simtime_t are typically used.
Emitting with a timestamp. By default, the emitted values are associated with the current simulation time. However, there might be cases where you want to associate the values with a different timestamp. For example, you may want to associate values with past timestamps, as is done with the recordWithTimestamp() method of cOutVector (see [7.10.1]). This situation can arise when, for example, you want to emit a value with a timestamp that reflects the start of an event, even though the event's outcome (the value) can only be known after the event has completed.
To emit a value with a different timestamp, you need to construct an object that contains a (timestamp, value) pair, and use the emit(simsignal_t, cObject*) method to emit it. The cTimestampedValue class provides this functionality, with two public data members: time (of type simtime_t) and value (of type double). It also has a convenience constructor that takes these two values.
- NOTE
cTimestampedValue is not part of the signal mechanism per se. However, the result recording listeners provided by OMNeT++ are designed to understand cTimestampedValue and know how to handle it.
Here is an example usage:
simtime_t frameReceptionStartTime = ...; double receivePower = ...; cTimestampedValue tmp(frameReceptionStartTime, receivePower); emit(recvPowerSignal, &tmp);
If performance is critical, you can make the cTimestampedValue object a
class member or a static variable to eliminate the construction/destruction
time.
- [It is safe to use a static variable here because the simulation
program is single-threaded. However, ensure that there isn't a listener
somewhere that would modify the same static variable during the firing process.]
Timestamps must be monotonically increasing.
Emitting non-numeric values. Sometimes, it is practical to have multi-purpose signals or retrofit an existing non-statistical signal so that it can be recorded as a result. For this reason, signals with non-numeric types (i.e., const char * and cObject *) may also be recorded as results. The built-in result recording listeners follow these rules when interpreting non-numeric values:
- Strings are recorded as 1.0.
- Objects that can be cast to cITimestampedValue are recorded using the getSignalTime() and getSignalValue() methods of the class.
- Other objects are recorded as 1.0, except for nullptr, which is recorded as 0.0.
cITimestampedValue is a C++ interface that can be used as an additional base class for any class. It is declared as follows:
class cITimestampedValue {
public:
virtual ~cITimestampedValue() {}
virtual double getSignalValue(simsignal_t signalID) = 0;
virtual simtime_t getSignalTime(simsignal_t signalID);
};
The getSignalValue() function is pure virtual (i.e., it must return some value), but the getSignalTime() function has a default implementation that returns the current simulation time. Note that the signalID argument allows the same class to serve multiple signals (i.e., to return different values for each).
4.15.7 Writing Result Filters and Recorders¶
You can define your own result filters and recorders in addition to the built-in ones. To do this, you need to write the implementation in C++ and register it with a macro to let OMNeT++ know about it. The new result filter or recorder can then be used in the source= and record= attributes of @statistic properties, just like the built-in ones.
Result filters must be subclassed from cResultFilter or one of its more specific subclasses (cNumericResultFilter and cObjectResultFilter). The new result filter class needs to be registered using the Register_ResultFilter(NAME, CLASSNAME) macro.
Similarly, a result recorder must be subclassed from cResultRecorder or the more specific cNumericResultRecorder class, and be registered using the Register_ResultRecorder(NAME, CLASSNAME) macro.

Here is an example implementation of a result filter taken from the simulation runtime:
/**
* Filter that outputs the sum of signal values divided by the measurement
* interval (simtime minus warmup period).
*/
class SumPerDurationFilter : public cNumericResultFilter
{
protected:
double sum;
protected:
virtual bool process(simtime_t& t, double& value, cObject *details);
public:
SumPerDurationFilter() {sum = 0;}
};
Register_ResultFilter("sumPerDuration", SumPerDurationFilter);
bool SumPerDurationFilter::process(simtime_t& t, double& value, cObject *)
{
sum += value;
value = sum / (simTime() - getSimulation()->getWarmupPeriod());
return true;
}
5 Messages and Packets¶
5.1 Overview¶
Messages are a central concept in OMNeT++. In the model, message objects represent events, packets, commands, jobs, customers, or other kinds of entities, depending on the model domain.
Messages are represented with the cMessage class and its subclass cPacket. cPacket is used for network packets (frames, datagrams, transport packets, etc.) in a communication network, and cMessage is used for everything else. Users are free to subclass both cMessage and cPacket to create new types and to add data.
cMessage has the following fields; some are used by the simulation kernel, and others are provided for the convenience of the simulation programmer:
- The name field is a string (const char *), which can be freely used by the simulation programmer. The message's name is displayed in many places in the graphical runtime interface, so it is generally useful to choose a descriptive name. The message's name is inherited from cObject (see section [7.1.2]).
- Message kind is an integer field. Some negative values are reserved by the simulation library, but zero and positive values can be freely used in the model for any purpose. The message kind is typically used to carry a value that conveys the role, type, category, or identity of the message.
- The scheduling priority field is used by the simulation kernel to determine the delivery order of messages that have the same arrival time values. This field is rarely used in practice.
- The send time, arrival time, source module, source gate, destination module, destination gate fields store information about the message's last sending or scheduling, and should not be modified from the model. These fields are primarily used internally by the simulation kernel while the message is in the future events set (FES), but the information is still in the message object when the message is delivered to a module.
- Time stamp (not to be confused with arrival time) is a utility field that the programmer can freely use for any purpose. The time stamp is not examined or changed by the simulation kernel at all.
- The parameter list, control info, and context pointer fields make some simulation tasks easier to program, and they will be discussed later.
The cPacket class extends cMessage with fields that are useful for representing network packets:
- The packet length field represents the length of the packet in bits. It is used by the simulation kernel to compute the transmission duration when a packet travels through a connection that has an assigned data rate, and also for error modeling on channels with a nonzero bit error rate.
- The encapsulated packet field helps in modeling protocol layers by supporting the concept of encapsulation and decapsulation.
- The bit error flag field carries the result of error modeling after the packet is sent through a channel that has a nonzero packet error rate (PER) or bit error rate (BER). It is up to the receiver to examine this flag after receiving the packet and to act upon it.
- The duration field carries the transmission duration after the packet was sent through a channel with a data rate.
- The is-reception-start flag tells whether this packet represents the start or the end of the reception after the packet has travelled through a channel with a data rate. This flag is controlled by the deliver-on-reception-start flag of the receiving gate.
5.2 The cMessage Class¶
5.2.1 Basic Usage¶
The cMessage constructor accepts an object name and a message kind, both optional:
cMessage(const char *name=nullptr, short kind=0);
Descriptive message names can be very useful when tracing, debugging or demonstrating the simulation, so it is recommended to use them. Message kind is usually initialized with a symbolic constant (e.g. an enum value) which signals what the message object represents. Only positive values and zero can be used -- negative values are reserved for use by the simulation kernel.
The following lines show some examples of message creation:
cMessage *msg1 = new cMessage();
cMessage *msg2 = new cMessage("timeout");
cMessage *msg3 = new cMessage("timeout", KIND_TIMEOUT);
Once a message has been created, its basic data members can be set with the following methods:
void setName(const char *name); void setKind(short k); void setTimestamp(); void setTimestamp(simtime_t t); void setSchedulingPriority(short p);
The argument-less setTimeStamp() method is equivalent to setTimeStamp(simTime()).
The corresponding getter methods are:
const char *getName() const; short getKind() const; simtime_t getTimestamp() const; short getSchedulingPriority() const;
The getName()/setName() methods are inherited from a generic base class in the simulation library, cNamedObject.
Two more interesting methods:
bool isPacket() const; simtime_t getCreationTime() const;
The isPacket() method returns true if the particular message object is a subclass of cPacket, and false otherwise. As isPacket() is implemented as a virtual function that just contains a return false or a return true statement, it might be faster than calling dynamic_cast<cPacket*>.
The getCreationTime() method returns the creation time of the message. It is worthwhile to mention that with cloned messages (see dup() later), the creation time of the original message is returned and not the time of the cloning operation. This is particularly useful when modeling communication protocols, because many protocols clone the transmitted packages to be able to do retransmissions and/or segmentation/reassembly.
5.2.2 Duplicating Messages¶
It is often necessary to duplicate a message or a packet, for example, to send one and keep a copy. Duplication can be done in the same way as for any other OMNeT++ object:
cMessage *copy = msg->dup();
The resulting message (or packet) will be an exact copy of the original
including message parameters and encapsulated messages, except for the
message ID field. The creation time field is also copied, so
for cloned messages getCreationTime() will return the creation
time of the original, not the time of the cloning operation.
- [Note, however, that the simulation library may delay the
duplication of the encapsulated message until it is really needed;
see section [5.4.5].]
When subclassing cMessage or cPacket, one needs to reimplement dup(). The recommended implementation is to delegate to the copy constructor of the new class:
class FooMessage : public cMessage {
public:
FooMessage(const FooMessage& other) {...}
virtual FooMessage *dup() const {return new FooMessage(*this);}
...
};
For generated classes (chapter [6]), this is taken care of automatically.
5.2.3 Message IDs¶
Every message object has a unique numeric message ID. It is normally used for identifying the message in a recorded event log file, but may occasionally be useful for other purposes as well. When a message is cloned (msg->dup()), the clone will have a different ID.
There is also another ID called tree ID. The tree ID is initialized to the message ID. However, when a message is cloned, the clone will retain the tree ID of the original. Thus, messages that have been created by cloning the same message or its clones will have the same tree ID. Message IDs are of the type long, which is is usually enough so that IDs remain unique during the simulation run (i.e. the counter does not wrap).
The methods for obtaining message IDs:
long getId() const; long getTreeId() const;
5.2.4 Control Info¶
One of the main application areas of OMNeT++ is the simulation of telecommunication networks. Here, protocol layers are usually implemented as modules which exchange packets. Packets themselves are represented by messages subclassed from cPacket.
However, communication between protocol layers requires sending additional information to be attached to packets. For example, a TCP implementation sending down a TCP packet to IP will want to specify the destination IP address and possibly other parameters. When IP passes up a packet to TCP after decapsulation from the IP header, it will want to let TCP know at least the source IP address.
This additional information is represented by control info objects in OMNeT++. Control info objects have to be subclassed from cObject (a small footprint base class with no data members), and can be attached to any message. cMessage has the following methods for this purpose:
void setControlInfo(cObject *controlInfo); cObject *getControlInfo() const; cObject *removeControlInfo();
When a "command" is associated with the message sending (such as TCP OPEN, SEND, CLOSE, etc), the message kind field (getKind(), setKind() methods of cMessage) should carry the command code. When the command doesn't involve a data packet (e.g. TCP CLOSE command), a dummy packet (empty cMessage) can be sent.
An object set as control info via setControlInfo() will be owned by the message object. When the message is deallocated, the control info object is deleted as well.
5.2.5 Information About the Last Arrival¶
The following methods return the sending and arrival times that correspond to the last sending of the message.
simtime_t getSendingTime() const; simtime_t getArrivalTime() const;
The following methods can be used to determine where the message came from and which gate it arrived on (or will arrive if it is currently scheduled or under way.) There are two sets of methods, one returning module/gate Ids, and the other returning pointers.
int getSenderModuleId() const; int getSenderGateId() const; int getArrivalModuleId() const; int getArrivalGateId() const; cModule *getSenderModule() const; cGate *getSenderGate() const; cModule *getArrivalModule() const; cGate *getArrivalGate() const;
There are further convenience functions to tell whether the message arrived on a specific gate given with id or with name and index.
bool arrivedOn(int gateId) const; bool arrivedOn(const char *gatename) const; bool arrivedOn(const char *gatename, int gateindex) const;
5.2.6 Display String¶
Display strings affect the message's visualization in graphical user interfaces like Qtenv. Message objects do not store a display string by default, but contain a getDisplayString() method that can be overridden in subclasses to return the desired string. The method:
const char *getDisplayString() const;
Since OMNeT++ version 5.1, cPacket's default getDisplayString() implementation is such so that a packet “inherits” the display string of its encapsulated packet, provided it has one. Thus, in the model of a network stack, the appearance of e.g. an application layer packet will be preserved even after multiple levels of encapsulation.
See section for more information on message display string syntax and possibilities.
5.3 Self-Messages¶
5.3.1 Using a Message as Self-Message¶
Messages are often used to represent events internal to a module, such as a periodically firing timer to represent the expiry of a timeout. A message is termed a self-message when it is used in such a scenario -- otherwise, self-messages are normal messages of the cMessage class or a class derived from it.
When a message is delivered to a module by the simulation kernel, the isSelfMessage() method can be used to determine if it is a self-message; that is, whether it was scheduled with scheduleAt(), or sent with one of the send...() methods. The isScheduled() method returns true if the message is currently scheduled. A scheduled message can also be cancelled using cancelEvent().
bool isSelfMessage() const; bool isScheduled() const;
The methods getSendingTime() and getArrivalTime() are also useful with self-messages: they return the time the message was scheduled and arrived (or will arrive; while the message is scheduled, arrival time is the time it will be delivered to the module).
5.3.2 Context Pointer¶
The cMessage class contains a context pointer of type void*, which can be accessed by the following functions:
void setContextPointer(void *p); void *getContextPointer() const;
The context pointer is not used or memory-managed by the simulation kernel. It is typically used in modules that manage multiple self-messages or timers to distinguish which specific timer has triggered upon message arrival. By pointing to a module's internal data structure, this pointer can convey essential information about the event's context.
5.4 The cPacket Class¶
5.4.1 Basic Usage¶
The cPacket constructor is similar to the cMessage constructor, but it accepts an additional bit length argument:
cPacket(const char *name=nullptr, short kind=0, int64 bitLength=0);
The most important field that cPacket has over cMessage is the message length. This field is kept in bits, but it can also be set/get in bytes. If the bit length is not a multiple of eight, the getByteLength() method will round it up.
void setBitLength(int64_t l); void setByteLength(int64_t l); void addBitLength(int64_t delta); void addByteLength(int64_t delta); int64_t getBitLength() const; int64_t getByteLength() const;
Another extra field is the bit error flag. It can be accessed with the following methods:
void setBitError(bool e); bool hasBitError() const;
5.4.2 Identifying the Protocol¶
In the OMNeT++ protocol models, the protocol type is usually represented in the message subclass. For example, instances of the IPv6Datagram class represent IPv6 datagrams and EthernetFrame represents Ethernet frames. The C++ dynamic_cast operator can be used to determine if a message object is of a specific protocol.
An example:
cMessage *msg = receive();
if (dynamic_cast<IPv6Datagram *>(msg) != nullptr) {
IPv6Datagram *datagram = (IPv6Datagram *)msg;
...
}
5.4.3 Information About the Last Transmission¶
When a packet has been received, some information can be obtained about the transmission, namely the transmission duration and the is-reception-start flag. They are returned by the following methods:
simtime_t getDuration() const; bool isReceptionStart() const;
5.4.4 Encapsulating Packets¶
When modeling layered protocols of computer networks, it is commonly needed to encapsulate a packet into another. The following cPacket methods are associated with encapsulation:
void encapsulate(cPacket *packet); cPacket *decapsulate(); cPacket *getEncapsulatedPacket() const;
The encapsulate() function encapsulates a packet into another one. The length of the packet will grow by the length of the encapsulated packet. An exception: when the encapsulating (outer) packet has zero length, OMNeT++ assumes it is not a real packet but an out-of-band signal, so its length is left at zero.
A packet can only hold one encapsulated packet at a time; the second encapsulate() call will result in an error. It is also an error if the packet to be encapsulated is not owned by the module.
Decapsulation, that is, removing the encapsulated packet, is done by the decapsulate() method. decapsulate() will decrease the length of the packet accordingly, except if it was zero. If the length would become negative, an error occurs.
The getEncapsulatedPacket() function returns a pointer to the encapsulated packet, or nullptr if no packet is encapsulated.
Example usage:
cPacket *data = new cPacket("data");
data->setByteLength(1024);
UDPPacket *udp = new UDPPacket("udp"); // subclassed from cPacket
udp->setByteLength(8);
udp->encapsulate(data);
EV << udp->getByteLength() << endl; // --> 8+1024 = 1032
And the corresponding decapsulation code:
cPacket *payload = udp->decapsulate();
5.4.5 Reference Counting¶
Since the 3.2 release, OMNeT++ implements reference counting of encapsulated packets, meaning that when a packet containing an encapsulated packet is cloned (dup()), the encapsulated packet will not be duplicated, only a reference count is incremented. Duplication of the encapsulated packet is deferred until decapsulate() actually gets called. If the outer packet is deleted without its decapsulate() method ever being called, then the reference count of the encapsulated packet is simply decremented. The encapsulated packet is deleted when its reference count reaches zero.
Reference counting can significantly improve performance, especially in LAN and wireless scenarios. For example, in the simulation of a broadcast LAN or WLAN, the IP, TCP and higher layer packets won't be duplicated (and then discarded without being used) if the MAC address doesn't match in the first place.
The reference counting mechanism works transparently. However, there is one implication: one must not change anything in a packet that is encapsulated into another! That is, getEncapsulatedPacket() should be viewed as if it returned a pointer to a read-only object (it returns a const pointer indeed), for quite obvious reasons: the encapsulated packet may be shared between several packets, and any change would affect those other packets as well.
5.4.6 Encapsulating Several Packets¶
The cPacket class does not directly support encapsulating more than one packet, but one can subclass cPacket or cMessage to add the necessary functionality.
Encapsulated packets can be stored in a fixed-size or a dynamically allocated array, or in a standard container like std::vector. In addition to storage, object ownership needs to be taken care of as well. The message class has to take ownership of the inserted messages, and release them when they are removed from the message. These tasks are done via the take() and drop() methods.
Here is an example that assumes that the class has an std::list member called messages for storing message pointers:
void MultiMessage::insertMessage(cMessage *msg)
{
take(msg); // take ownership
messages.push_back(msg); // store pointer
}
void MultiMessage::removeMessage(cMessage *msg)
{
messages.remove(msg); // remove pointer
drop(msg); // release ownership
}
One also needs to provide an operator=() method to make sure that message objects are copied and duplicated properly. Section [7.13] covers requirements and conventions associated with deriving new classes in more detail.
5.5 Attaching Objects To a Message¶
When parameters or objects need to be added to a message, the preferred way to do so is via message definitions, as described in chapter [6].
5.5.1 Attaching Objects¶
The cMessage class has an internal cArray object that can carry objects. Only objects derived from cObject can be attached. The addObject(), getObject(), hasObject(), and removeObject() methods use the object's name (as returned by the getName() method) as the key to the array.
An example where the sender attaches an object, and the receiver checks for the object's existence and obtains a pointer to it:
// sender:
cHistogram *histogram = new cHistogram("histogram");
msg->addObject(histogram);
// receiver:
if (msg->hasObject("histogram")) {
cObject *obj = msg->getObject("histogram");
cHistogram *histogram = check_and_cast<cHistogram *>(obj);
...
}
One needs to ensure that the names of the attached objects don't conflict with each other. Note that message parameters (cMsgPar, see the next section) are also attached in the same way, so their names also count.
When no objects are attached to a message (and getParList() is not invoked), the internal cArray object is not created. This saves both storage and execution time.
Non-cObject data can be attached to messages by wrapping them into cObject, for example into cMsgPar, which has been designed specifically for this purpose. cMsgPar will be covered in the next section.
5.5.2 Attaching Parameters¶
The preferred way to extend messages with new data fields is to use message definitions (see chapter [6]).
The old and deprecated way of adding new fields to messages is by attaching cMsgPar objects. There are several downsides to this approach, with the worst being large memory and execution time overhead. cMsgPars are heavyweight and fairly complex objects themselves. It has been reported that using cMsgPar message parameters might account for a large part of execution time, sometimes as much as 80%. Using cMsgPar is also error-prone because cMsgPar objects have to be added dynamically and individually to each message object. In contrast, subclassing benefits from static type checking: if one mistypes the name of a field in the C++ code, the compiler can detect the mistake.
If one still needs cMsgPars for some reason, here is a short summary. At the sender side, one can add a new named parameter to the message with the addPar() member function, and then set its value with one of the methods setBoolValue(), setLongValue(), setStringValue(), setDoubleValue(), setPointerValue(), setObjectValue(), and setXMLValue(). There are also overloaded assignment operators for the corresponding C/C++ types.
At the receiver side, one can look up the parameter object on the message by name and obtain a reference to it with the par() member function. hasPar() can be used to first check whether the message object has a parameter object with the given name. Then the value can be read with the methods boolValue(), longValue(), stringValue(), doubleValue(), pointerValue(), objectValue(), xmlValue(), or by using the provided overloaded type cast operators.
Example usage:
msg->addPar("destAddr");
msg->par("destAddr").setLongValue(168);
...
long destAddr = msg->par("destAddr").longValue();
Or, using overloaded operators:
msg->addPar("destAddr");
msg->par("destAddr") = 168;
...
long destAddr = msg->par("destAddr");
6 Message Definitions¶
6.1 Introduction¶
In practice, various fields need to be added to cMessage or cPacket to make them useful. For example, when modeling communication networks, message/packet objects need to carry protocol header fields. Since the simulation library is written in C++, the natural way to extend cMessage/cPacket is by subclassing them. However, at least three items have to be added to the new class for each field (a private data member, a getter, and a setter method), and the resulting class needs to integrate with the simulation framework. This means that writing the necessary C++ code can be a tedious and time-consuming task.
OMNeT++ offers a more convenient way called message definitions. Message definitions provide a compact syntax to describe message contents, and the corresponding C++ code is automatically generated from the definitions. When needed, the generated class can also be customized via subclassing. Even when the generated class needs to be heavily customized, message definitions can still save the programmer a great deal of manual work.
6.1.1 The First Message Class¶
Let us begin with a simple example. Suppose we need a packet type that carries a source and a destination address as well as a hop count. The corresponding C++ code can be generated from the following definition in a MyPacket.msg file:
packet MyPacket
{
int srcAddress;
int destAddress;
int remainingHops = 32;
};
It is the task of the OMNeT++ message compiler, opp_msgc or opp_msgtool, to translate the definition into a C++ class that can be instantiated from C++ model code. The message compiler is normally invoked for .msg files automatically, as part of the build process.
When the message compiler processes MyPacket.msg, it creates two files: MyPacket_m.h and MyPacket_m.cc. The generated MyPacket_m.h will contain the following class declaration (abbreviated):
class MyPacket : public cPacket {
protected:
int srcAddress;
int destAddress;
int remainingHops = 32;
public:
MyPacket(const char *name=nullptr, short kind=0);
MyPacket(const MyPacket& other);
MyPacket& operator=(const MyPacket& other);
virtual MyPacket *dup() const override {return new MyPacket(*this);}
...
// field getter/setter methods
virtual int getSrcAddress() const;
virtual void setSrcAddress(int srcAddress);
virtual int getDestAddress() const;
virtual void setDestAddress(int destAddress);
virtual int getRemainingHops() const;
virtual void setRemainingHops(int remainingHops);
};
As you can see, for each field, the generated class contains a protected data member, and a public getter and setter method. The names of the methods will begin with get and set, followed by the field name with its first letter converted to uppercase.
The MyPacket_m.cc file contains the implementation of the generated MyPacket class as well as “reflection” code (see cClassDescriptor) that allows inspection of these data structures under graphical user interfaces like Qtenv. The MyPacket_m.cc file should be compiled and linked into the simulation; this is normally taken care of automatically.
To use the MyPacket class from a C++ source file, the generated header file needs to be included:
#include "MyPacket_m.h"
...
MyPacket *pkt = new MyPacket("pkt");
pkt->setSrcAddress(localAddr);
...
6.1.2 Ingredients of Message Files¶
Message files contain the following components:
- Packet, message, and class definitions are translated into C++ class definitions. The three types are very similar; they practically only differ in the choice of the default base class (cPacket, cMessage, and no base class, respectively).
- Struct definitions are translated into C-like structs, where fields are represented with public data members (there are no getters and setters).
- Enum definitions are translated into C++ enums.
- Namespace declarations define the namespace for subsequent definitions.
- Imports allow the reuse of definitions from other .msg files.
- Properties are metadata annotations of the syntax @name or @name(...) that may occur at the file, class (packet, struct, etc.) definition, and field level as well. There are many predefined properties, and a large subset of them deals with the details of what C++ code to generate for the item they occur with. For example, @getter(getFoo) on a field requests that the generated getter function have the name getFoo.
- C++ blocks are used for injecting literal C++ code fragments into the generated source files. The target (the place where to insert the code) can be specified.
The following sections describe all of the above elements in detail.
6.2 Classes, Messages, Packets, Structs¶
As shown above, the message description language allows you to generate C++ data classes and structs from concise descriptions that have a syntax resembling C structs. The descriptions contain the choice of the base class (message descriptions only support single inheritance), the list of fields the class should have, and possibly various metadata annotations that control the details of the code generation.
A description starts with one of the packet, message, class, struct keywords. The first three are very similar: they all generate C++ classes, and only differ on the choice of the default base class (and related details such as the argument list of the constructor). The fourth one generates a plain (C-style) struct.
6.2.1 Classes, Messages, Packets¶
For packet, the default base class is cPacket; or if a base class is explicitly named, it must be a subclass of cPacket. Similarly, for message, the default base class is cMessage, or if a base class is specified, it must be a subclass of cMessage.
For class, the default base class is none. However, it is often a
good idea to choose cObject as the base class.
- [Until OMNeT++
6.0, the default base class was cObject. Thus, when migrating code from
version 5.x or earlier, one needs to add extends cObject to class
definitions lacking an "extends" clause.]
- NOTE
It is recommended to use cObject as the base class because it adds zero overhead to the generated class and, at the same time, makes the class more interoperable with the rest of the simulation library. cObject only defines virtual methods but no data members, so the only overhead would be the vptr; however, the generated class already has a vptr because the generated methods are also virtual.
The base class is specified with the extends keyword. For example:
packet FooPacket extends PacketBase
{
...
};
The generated C++ class will look like this:
class FooPacket : public PacketBase {
...
};
The generated class will have a constructor and also a copy constructor. An assignment operator (operator=()) and a cloning method (dup()) will also be generated.
The argument list of the generated constructor depends on the base class. For classes derived from cMessage, it will accept an object name and message kind. For classes derived from cNamedObject, it will accept an object name. The arguments are optional (they have default values).
class FooPacket : public PacketBase
{
public:
FooPacket(const char *name=nullptr, int kind=0);
FooPacket(const FooPacket& other);
FooPacket& operator=(const FooPacket& other);
virtual FooPacket *dup() const;
...
Additional base classes can be added by listing them in the @implements class property.
6.2.2 Structs¶
Message definitions allow you to define C-style structs, where “C-style” means “containing only data and no methods”. These structs can be useful as fields in message classes.
The syntax is similar to that of defining messages:
struct Place
{
int type;
string description;
double coords[3];
};
The generated struct has public data members and no getter or setter methods. The following code is generated from the above definition:
// generated C++
struct Place
{
int type;
omnetpp::opp_string description;
double coords[3];
};
Note that string fields are generated with the opp_string C++ type, which is a minimalistic string class that wraps const char* and takes care of allocation/deallocation. It was chosen instead of std::string because of its significantly smaller memory footprint. (std::string is significantly larger than a const char* pointer because it also needs to store length and capacity information in some form.)
Inheritance is supported for structs:
struct Base
{
...
};
struct Extended extends Base
{
...
};
However, because a struct has no member functions, there are limitations:
- Variable-size arrays are not supported;
- Customization via inheritance and abstract fields (see later in [6.10.6]) cannot be used;
- Classes subclassed from cOwnedObject cannot be used as fields in structs because structs cannot be owners.
6.3 Enums¶
An enum is declared with the enum keyword, using the following syntax:
enum PayloadType
{
NONE = 0;
VOICE = 1;
VIDEO = 2;
DATA = 3;
};
Enum values must be unique.
The message compiler translates an enum into a normal C++ enum, and also generates a descriptor that stores the symbolic names as strings. The latter makes it possible for Qtenv to display symbolic names for enum values.
Enums can be used in two ways. The first is simply to use the enum's name as field type:
packet FooPacket
{
PayloadType payloadType;
};
The second way is to tag a field of the type int or any other integral type with the @enum property and the name of the enum, like this:
packet FooPacket
{
int16_t payloadType @enum(PayloadType);
};
In the generated C++ code, the field will have the original type (in this case, int16_t). However, additional code generated by the message compiler will allow Qtenv to display the symbolic name of the field's value in addition to the numeric value.
6.4 Imports¶
Import directives are used to make definitions in one message file available to another one. Importing an MSG file makes the definitions in that file available to the file that imports it, but has no further side effect (and in particular, it will generate no C++ code).
To import a message file, use the import keyword followed by a name that identifies the message file within its project:
import inet.linklayer.common.MacAddress;
The imported name is interpreted as a relative file path (by replacing dots with slashes, and appending .msg), which is searched for in folders listed in the message import path, much like C/C++ include files are searched for in the compiler's include path, Python modules in the Python module search path, or NED files in the NED path.
The message import path can be specified to the message compiler via a series of -I command-line options.
6.5 Namespaces¶
To place generated types into a namespace, add a namespace directive above the types in question:
namespace inet;
Hierarchical (nested) namespaces are declared using double colons in the namespace definition, similar to nested namespace definitions introduced in C++ in version C++17.
namespace inet::ieee80211;
The above code will be translated into multiple nested namespaces in the C++ code:
namespace inet { namespace ieee80211 {
...
}}
There can be multiple namespace directives in a message file. The effect of the namespace directive extends from the place of the directive until the next namespace directive or the end of the message file. Each namespace directive opens a completely new namespace, i.e. not a namespace within the previous one. An empty namespace directive (namespace;) returns to the global namespace. For example:
namespace foo::bar;
class A {} // defines foo::bar::A
namespace baz;
class B {} // defines baz::B
namespace;
class C {} // defines ::C
6.6 Properties¶
Properties are metadata annotations of the syntax @name or @name(...) that may occur on file, class (packet, struct, etc.) definitions, and field levels. There are many predefined properties, and a large subset of them deals with the details of what C++ code to generate for the item they occur with. For example, @getter(getFoo) on a field requests that the generated getter function has the name getFoo.
Here is a syntax example. Note that class properties are placed in the fields list (fields and properties may be mixed in an arbitrary order), and field properties are written after the field name.
@foo;
class Foo {
@customize(true);
string value @getter(...) @setter(...) @hint("...");
}
Syntactically, the mandatory part of a property is the @ character followed by the property name. They are then optionally followed by an index and a parameter list. The index is a name in square brackets, and it is rarely used. The parameter list is enclosed in parentheses, and in theory, it may contain a value list and key-value list pairs, but almost all properties expect to find just a single value there.
For boolean properties, the value may be true or false; if the value is missing, true is assumed. Thus, @customize is equivalent to @customize(true).
As a guard against mistyping property names, properties need to be declared before they can be used. Properties are declared using the @property property, with the name of the new property in the index, and the type and other attributes of the property in the parameter list. Examples for property declarations, including the declaration of @property itself, can be seen by listing the built-in definitions of the message compiler (opp_msgtool -h builtindefs).
The complete list of properties understood by the message compiler and other OMNeT++ tools can be found in Appendix [24].
6.6.1 Data Types¶
The following data types can be used for fields:
- C/C++ primitive data types: bool, char, short, int, long, unsigned char, unsigned short, unsigned int, $2unsigned long, float, double.
- string. Getters and setters use the const char* data type; nullptr is not allowed. Setters store a copy of the string, not just the pointer.
- C99-style fixed-size integer types: int8_t,
int16_t, int32_t, int64_t,
uint8_t, uint16_t, uint32_t,
uint64_t.
- [These type names are accepted without the
_t suffix as well, but you are responsible to ensure that the
generated code compiles, i.e., the shortened type names must be defined in a
header file you include.]
In addition, OMNeT++ class names such as simtime_t and cMessage are also made available without the need to import anything. These names are accepted both with and without spelling out the omnetpp namespace name.
Numeric fields are initialized to zero, booleans to false, and string fields to the empty string.
6.7 Fields¶
6.7.1 Scalar fields¶
A scalar field is one that holds a single value. It is defined by specifying the data type and the field name, for example:
int timeToLive;
For each field, the generated class will have a protected data member, and a public getter and setter method. The names of the methods will begin with get and set, followed by the field name with its first letter converted to uppercase. Thus, the above field will generate the following methods in the C++ class:
int getTimeToLive() const; void setTimeToLive(int timeToLive);
- NOTE
All methods are generated to be virtual, but we omit the virtual keyword here and in further examples.
The method names are derived from the field name, but they can be customized with the @getter and @setter properties, as shown below:
int timeToLive @getter(getTTL) @setter(setTTL);
The choice of C++ type used for the data member and the getter/setter methods can be overridden with the help of the @cppType property (and on a more fine-grained level, with @datamemberType, @argType and @returnType), although this is rarely useful.
6.7.2 Initial Values¶
Initial values for fields can be specified after an equal sign, like so:
int version = HTTP_VERSION; string method = "GET"; string resource = "/"; bool keepAlive = true; int timeout = 5*60;
Any phrase that is a valid C++ expression can be used as an initializer value. (The message compiler does not check the syntax of the values, it merely copies them into the generated C++ file.)
For array fields, the initializer specifies the value for individual array elements. There is no syntax for initializing an array with a list of values.
6.7.3 Overriding Initial Values from Subclasses¶
In a subclass, it is possible to override the initial value of an inherited field. The syntax is similar to that of a field definition with an initial value, only the data type is missing.
An example:
packet Ieee80211Frame
{
int frameType;
...
};
packet Ieee80211DataFrame extends Ieee80211Frame
{
frameType = DATA_FRAME; // assignment of the inherited field
...
};
It may seem like the message compiler would need the definition of the base class to check the definition of the field being assigned. However, this is not the case. The message compiler trusts that such a field exists; or rather, it leaves the check to the C++ compiler.
What the message compiler actually does is derive a setter method name from the field name and generate a call to it into the constructor. Thus, the generated constructor for the above packet type would be something like this:
Ieee80211DataFrame::Ieee80211DataFrame(const char *name, int kind) :
Ieee80211Frame(name, kind)
{
this->setFrameType(DATA_FRAME);
...
}
This implementation also lets one initialize cMessage /cPacket fields such as message kind or packet length:
packet UDPPacket
{
byteLength = 16; // results in 'setByteLength(16);' being placed into ctor
};
6.7.4 Const Fields¶
A field can be marked as const by using the const keyword. A const field only has a (const) data member and a getter function, but no setter. The value can be provided via an initializer. An example:
const int foo = 24;
This generates a const int data member in the class, initialized to 24, and a getter member function that returns its value:
int getFoo() const;
Array fields cannot be const.
Note that a pointer field may also be marked const, but const is interpreted differently in that case: as a mutable field that holds a pointer to a const object.
One use of const is to implement computed fields. For that, the field needs to be annotated with the @custom or @customImpl property to allow for a custom implementation to be supplied for the getter. The custom getter can then encapsulate the computation of the field value. Customization is covered in section [6.10].
- NOTE
To add actual constants (as opposed to getter-only fields) to a class, it is better to use a targeted cplusplus block to inject their definitions into the C++ class declaration.
6.7.5 Abstract Fields¶
Abstract fields are a way to allow custom implementation (such as storage, getter/setter methods, etc.) to be provided for a field. For a field marked as abstract, the message compiler does not generate a data member, and generated getter/setter methods will be pure virtual. It is expected that the pure virtual methods will be implemented in a subclass (possibly via @customize, see [6.10]).
A field is declared abstract by using the abstract keyword or the @abstract property (the two are equivalent).
abstract bool urgentBit; // or: bool urgentBit @abstract;
The generated pure virtual methods:
virtual bool getUrgentBit() const = 0; virtual void setUrgentBit(bool urgentBit) = 0;
Alternatives to abstract, at least for certain use cases, are @custom and @customImpl (see section [6.10]).
6.7.6 Fixed-Size Arrays¶
Fixed-size arrays can be declared with the usual syntax of putting the array size in square brackets after the field name:
int route[4];
The generated getter and setter methods will have an extra k argument (the array index), and a third method that returns the array size is also generated:
int getRoute(size_t k) const; void setRoute(size_t k, int route); size_t getRouteArraySize() const;
When the getter or setter method is called with an index that is out of bounds, an exception is thrown.
The method names can be overridden with the @getter, @setter, and @sizeGetter properties. To use another C++ type for array size and indices instead of the default size_t, specify the @sizeType property.
- NOTE
Use a singular noun for the field name instead of a plural noun (route[] instead of routes[]), otherwise, method names will look confusing (getRoutes(), appendRoutes(), etc., for methods that deal with a single route).
When a default value is given, it is interpreted as a scalar for filling the array with. There is no syntax for initializing an array with a list of values.
int route[4] = -1; // all elements set to -1
6.7.7 Variable-Size Arrays¶
If the array size is not known in advance, the field can be declared to have a variable size by using an empty pair in brackets:
int route[];
In this case, the generated class will have extra methods in addition to the getter and setter: one for resizing the array, one for getting the array size, plus methods for inserting an element at a given position, appending an element, and erasing an element at a given position.
int getRoute(size_t k) const; void setRoute(size_t k, int route); void setRouteArraySize(size_t size); size_t getRouteArraySize() const; void insertRoute(size_t k, int route); void appendRoute(int route); void eraseRoute(size_t k);
The default array size is zero. Elements can be added by calling the inserter or the appender method or resizing the array and setting individual elements.
Internally, all methods that change the array size (inserter, appender, resizer) always allocate a new array and copy existing values over to the new array. Therefore, when adding a large number of elements, it is recommended to resize the array first instead of calling the appender method multiple times.
The method names can be overridden with the @getter, @setter, @sizeGetter, @sizeSetter, @inserter, @appender, and @eraser field properties. To use another C++ type for array size and indices instead of the default size_t, specify the @sizeType property.
When a default value is given, it is used for initializing new elements when the array is expanded.
int route[] = -1;
6.7.8 Classes and Structs as Fields¶
Classes and structs may also be used as fields, not only primitive types and string. For example, given a class named IPAddress, one can write the following field:
IPAddress sourceAddress;
The IPAddress type must be known to the message compiler.
The generated class will contain an IPAddress data member, and the following member functions:
const IPAddress& getSourceAddress() const; void setSourceAddress(const IPAddress& sourceAddress); IPAddress& getSourceAddressForUpdate();
Note that in addition to the getter and setter, a mutable getter (get...ForUpdate) is also generated, which allows the stored value (object or struct) to be modified in place.
By default, values are passed by reference. This can be changed by specifying the @byValue property:
IPAddress sourceAddress @byValue;
This generates the following member functions:
virtual IPAddress getSourceAddress() const; virtual void setSourceAddress(IPAddress sourceAddress);
Note that both member functions use pass-by-value, and that the mutable getter function is not generated.
Specifying const will cause only a getter function to be generated but no setter or mutable getter, as shown before in [6.7.4].
Array fields are treated similarly, the difference being that the getter and setter methods take an extra index argument:
IPAddress route[];
The generated methods:
void setRouteArraySize(size_t size); size_t getRouteArraySize() const; const IPAddress& getRoute(size_t k) const; IPAddress& getRouteForUpdate(size_t k); void setRoute(size_t k, const IPAddress& route); void insertRoute(size_t k, const IPAddress& route); void appendRoute(const IPAddress& route); void eraseRoute(size_t k);
6.7.9 Non-Owning Pointer Fields¶
The field type may be a pointer, both for scalar and array fields. Pointer fields come in two flavors: owning and non-owning. A non-owning pointer field just stores the pointer value regardless of the ownership of the object it points to, while an owning pointer holds the ownership of the object. This section discusses non-owning pointer fields.
Example:
cModule *contextModule; // missing @owner: non-owning pointer field
The generated methods:
const cModule *getContextModule() const; void setContextModule(cModule *contextModule); cModule *getContextModuleForUpdate();
If the field is marked const, then the setter will take a const pointer, and the getForUpdate() method is not generated:
const cModule *contextModule;
The generated methods:
const cModule *getContextModule() const; void setContextModule(const cModule *contextModule);
6.7.10 Owning Pointer Fields¶
This section discusses pointer fields that own the objects they point to, that is, are responsible for deallocating the object when the object containing the field (let's refer to it as the “container” object) is deleted.
For all owning pointer fields in a class, the destructor of the class deletes the owned objects, the dup() method and the copy constructor duplicate the owned objects for the newly created object, and the assignment operator (operator=) does both: the old objects in the destination object are deleted, and replaced by clones of the objects in the source object.
When the owned object is a subclass of cOwnedObject that keeps track of its owner, the code generated for the container class invokes the take() and drop() methods at the appropriate times to manage the ownership.
Example:
cPacket *payload @owned;
The generated methods:
const cPacket *getPayload() const; cPacket *getPayloadForUpdate(); void setPayload(cPacket *payload); cPacket *removePayload();
The getter and mutable getter return the stored pointer (or nullptr if there is none).
The remover method releases the ownership of the stored object, sets the field to nullptr, and returns the object.
The setter method behavior depends on the presence of the @allowReplace property. By default (when @allowReplace is absent), the setter does not allow replacing the object. That is, when the setter is invoked on a field that already contains an object (the pointer is non-null), an error is raised: "A value is already set, remove it first with removePayload()". One must call removePayload() before setting a new object.
When @allowReplace is specified for the field, there is no need to call the remover method before setting a new value because the setter method deletes the old object before storing the new one.
cPacket *payload @owned @allowReplace; // allow setter to delete the old object
If the field is marked const, then the getForUpdate() method is not generated, and the setter takes a const pointer.
const cPacket *payload @owned;
The generated methods:
const cPacket *getPayload() const; void setPayload(const cPacket *payload); cPacket *removePayload();
The name of the remover method (which is the only extra method compared to non-pointer fields) can be customized using the @remover property.
6.8 Literal C++ Blocks¶
It is possible to inject C++ code fragments directly into the generated code. This is done using the cplusplus keyword, optionally followed by a target in parentheses, and enclosing the code fragment in double curly braces.
The target specifies where to insert the code fragment in the generated header or implementation file; we will explain it in a moment.
The message compiler does not attempt to interpret the code fragment; instead,
it simply copies it into the generated source file at the requested location.
The code fragment should be formatted in a way that it does not contain a double
closing curly brace (}}) as it would be interpreted as the end of the
fragment block.
- [If this ever becomes a problem, simply insert a space
between the two braces, or use the automatic concatenation of adjacent string
literals feature of C/C++ if they occur within a string constant. For example,
break up "foo}}bar" into "foo}" "}bar".]
cplusplus {{
#include "FooDefs.h"
#define SOME_CONSTANT 63
}}
The target can be h (the generated header file -- this is the default), cc (the generated .cc file), the name of a type generated in the same message file (content is inserted in the declaration of the type, just before the closing curly brace), or a member function name of one such type.
cplusplus blocks with the target h are commonly used to insert #include directives, commonly used constants or macros (e.g., #defines), or, rarely, typedefs and other elements into the generated header. The fragments are pasted into the namespace which is open at that point. Note that includes should always be placed into a cplusplus(h) block above the first namespace declaration in the message file.
cplusplus blocks with the target cc allow you to insert code into the .cc file, for example, implementations of member functions. This is useful, for instance, with custom-implementation fields (@customImpl, see [6.10.4]).
cplusplus blocks with a type name as the target allow you to insert new data members and member functions into the class. This is useful, for example, with custom fields (@custom, see [6.10.5]).
To inject code into the implementation of a member function of a generated class, specify <classname>::<methodname> as the target. Supported methods include the constructor, copy constructor (use Foo& as the name), destructor, operator=, copy(), parsimPack(), parsimUnpack(), etc., and the per-field generated methods (setter, getter, etc.).
6.9 Using External C++ Types¶
%% legacyThe message compiler only allows the use of types it knows about for fields or base classes. If you want to use types that are not generated by the message compiler, you need to do the following:
- Let the message compiler know about the type; and
- Make sure its C++ declaration is available at compile time.
For the first step, you can use the @existingClass property. When a type (class or struct) is annotated with @existingClass, the message compiler remembers the definition but assumes that the class (or struct) already exists in the C++ code and does not generate it. (However, it will still generate a class descriptor, see section [6.11].)
- NOTE
Support for C++-style type announcements is no longer part of the message definitions syntax; they were removed in OMNeT++ version 6.0.
The second step is achieved by adding a cplusplus block with an #include directive to the message file.
For example, suppose we have a hand-written ieee802::MACAddress class defined in MACAddress.h that we would like to use for fields in multiple message files. One way to make this possible is to add a MACAddress.msg file alongside the header with the following content:
// MACAddress.msg
cplusplus {{
#include "MACAddress.h"
}}
class ieee802::MACAddress // a separate namespace decl would also work
{
@existingClass;
int8_t octet[6]; // assumes class has getOctet(k) and setOctet(k)
}
As exemplified above, for existing classes, it is possible to announce them with their namespace-qualified name; there is no need for a separate namespace line.
This message file can be imported into all other message files that need the MACAddress, for example, like this:
import MACAddress;
packet EthernetFrame {
ieee802::MACAddress source;
ieee802::MACAddress destination;
...
}
6.10 Customizing the Generated Class¶
There are several possibilities for customizing a generated class:
- Using custom method names and custom field types
- Using custom field types
- Injecting code into existing member functions
- Custom fields
- Fields with custom-implementation methods
- The Generation Gap pattern
- Abstract fields
- Special customizations, e.g. @str, @nopack, etc.
The following sections explore the aforementioned possibilities.
6.10.1 Customizing Method Names¶
The names and some other properties of generated methods can be influenced with metadata annotations (properties).
The following field properties exist for overriding method names: @getter, @setter, @getterForUpdate, @remover, @sizeGetter, @sizeSetter, @inserter, @appender and @eraser.
To override data types used by the data member and its accessor methods, use @cppType, @datamemberType, @argType, or @returnType.
To override the default size_t type used for array size and indices, use @sizeType.
Consider the following example:
packet IPPacket {
int ttl @getter(getTTL) @setter(setTTL);
Option options[] @sizeGetter(getNumOptions)
@sizeSetter(setNumOptions)
@sizetype(short);
}
The generated class would have the following methods (note the differences from the default names getTtl(), setTtl(), getOptions(), setOptions(), getOptionsArraySize(), getOptionsArraySize(); also note that indices and array sizes are now short):
virtual int getTTL() const; virtual void setTTL(int ttl); virtual const Option& getOption(short k) const; virtual void setOption(short k, const Option& option); virtual short getNumOptions() const; virtual void setNumOptions(short n);
In some older simulation models, you may also see the use of the @omitGetVerb class property. This property tells the message compiler to generate getter methods without the “get” prefix, e.g. for a sourceAddress field it would generate a sourceAddress() method instead of the default getSourceAddress(). It is not recommended to use @omitGetVerb in new models because it is inconsistent with the accepted naming convention.
6.10.2 Injecting Code into Methods¶
Generally, literal C++ blocks (the cplusplus keyword) are the way to inject code into the body of individual methods, as described in [6.8].
The @beforeChange class property can be used to designate a member function that is to be called before any mutator code (in setters, non-const getters, assignment operator, etc.) executes. This can be used to implement, for example, a dirty flag or some form of immutability (i.e. freeze the state of the object).
6.10.3 Generating str()¶
The @str class property aims to simplify adding an str() method in the generated class. Having an str() method is often useful for debugging, and it also has a special role in class descriptors (see [6.11.6]).
When @str is present, an std::string str() const method is generated for the class. The method's implementation will contain a single return keyword, with the value of the @str property copied after it.
Example:
class Location {
double lat;
double lon;
@str("(" + std::to_string(getLat()) + "," + std::to_string(getLon()) + ")");
}
It will result in the following str() method to be generated as part of the Location class:
std::string Location::str() const
{
return "(" + std::to_string(getLat()) + "," + std::to_string(getLon()) + ")";
}
6.10.4 Custom-implementation Methods¶
When member functions generated for a field need customized implementation and method-targeted C++ blocks are not sufficient, the customImpl property can be of help. When a field is marked customImpl, the message compiler will skip generating the implementations of its accessor methods in the .cc file, allowing the user to supply their own versions.
Here is a simple example. The methods in it do not perform anything extra compared to the default generated versions, but they illustrate the principle.
class Packet
{
int hopCount @customImpl;
}
cplusplus(cc) {{
int Packet::getHopCount() const
{
return hopCount; // replace/extend with extra code
}
void Packet::setHopCount(int value)
{
hopCount = value; // replace/extend with extra code
}
}}
6.10.5 Custom Fields¶
If a field is marked with @custom, the field will only appear in the class descriptor, but no code is generated for it at all. One can inject the code that implements the field (data member, getter, setter, etc.) via targeted cplusplus blocks ([6.8]). @custom is a good way to go when you want the field to have a different underlying storage or different accessor methods than normally generated by the message compiler. (For the latter case, however, be aware that the generated class descriptor assumes the presence of certain accessor methods for the field, although the set of expected methods can be customized to a degree. See [6.11] for details.)
The following example uses @custom to implement a field that acts as a stack (has push() and pop() methods), and uses std::vector as the underlying data structure.
cplusplus {{
#include <vector>
}}
class MPLSHeader
{
int32_t label[] @custom @sizeGetter(getNumLabels) @sizeSetter(setNumLabels);
}
cplusplus(MPLSHeader) {{
protected:
std::vector<int32_t> labels;
public:
// expected methods:
virtual void setNumLabels(size_t size) {labels.resize(size);}
virtual size_t getNumLabels() const {return labels.size();}
virtual int32_t getLabel(size_t k) const {return labels.at(k);}
virtual void setLabel(size_t k, int32_t label) {labels.at(k) = label;}
// new methods:
virtual void pushLabel(int32_t label) {labels.push_back(label);}
virtual int32_t popLabel() {auto l=labels.back();labels.pop_back();return l;}
}}
cplusplus(MPLSHeader::copy) {{
labels = other.labels;
}}
The last C++ block is needed so that the copy constructor and the operator= method also copy the new field. (copy() is a member function where the common part of the above two are factored out, and the C++ block injects code in there.)
6.10.6 Customizing the Class via Inheritance¶
Another way of customizing the generated code is by employing what is known as the Generation Gap design pattern, proposed by John Vlissides. The idea is that the customization can be done while subclassing the generated class, overriding whichever member functions need to be different from their generated versions.
This feature is enabled by adding the @customize property to the class. Doing so will cause the message compiler to generate an intermediate class instead of the final one, and the user will subclass the intermediate class to obtain the real class. The name of the intermediate class is obtained by appending _Base to the class name. The subclassing code can be in an entirely different header and .cc file from the generated one, so this method does not require the use of cplusplus blocks.
Consider the following example:
packet FooPacket
{
@customize(true);
...
};
The message compiler will generate a FooPacket_Base class instead of FooPacket. It is then the user's task to subclass FooPacket_Base to derive FooPacket, while adding extra data members and adding/overriding methods to achieve the goals that motivated the customization.
There is a minimum amount of code you have to write for FooPacket, because not everything can be pre-generated as part of FooPacket_Base (e.g. constructors cannot be inherited). This minimum code, which usually goes into a header file, is the following:
class FooPacket : public FooPacket_Base
{
private:
void copy(const FooPacket& other) { ... }
public:
FooPacket(const char *s=nullptr, short kind=0) : FooPacket_Base(s,kind) {}
FooPacket(const FooPacket& other) : FooPacket_Base(other) {copy(other);}
FooPacket& operator=(const FooPacket& other) {if (this==&other) return *this;
FooPacket_Base::operator=(other); copy(other); return *this;}
virtual FooPacket *dup() const override {return new FooPacket(*this);}
};
- NOTE
The above boilerplate code can be copied out of the generated C++ header, which contains it as a comment.
The generated constructor, copy constructor, operator=, dup() can usually be copied verbatim. The only method that needs custom code is copy(). It is shared by the copy constructor and operator=, and should take care of copying the new data members you added as part of FooPacket.
In addition to the above, the implementation (.cc) file should contain the registration of the new class:
Register_Class(FooPacket);
6.10.7 Using an Abstract Field¶
Abstract fields, introduced in [6.7.5], are an alternative to @custom (see [6.10.5]) for allowing a custom implementation (such as storage, getter/setter methods, etc.) to be provided for a field. For a field marked abstract, the message compiler does not generate a data member, and generated getter/setter methods will be pure virtual.
Abstract fields are most often used together with the Generation Gap pattern (see [6.10.6]), so that one can immediately supply a custom implementation.
The following example demonstrates the use of abstract fields for creating an array field that uses std::vector as the underlying implementation:
packet FooPacket
{
@customize(true);
abstract int foo[]; // impl will use std::vector<int>
}
If you compile the above code, in the generated C++ code you will only find abstract methods for foo, but no underlying data member or method implementation. You can implement everything as you like. You can then write the following C++ file to implement foo with std::vector (some details omitted for brevity):
#include <vector>
#include "FooPacket_m.h"
class FooPacket : public FooPacket_Base
{
protected:
std::vector<int> foo;
public:
// constructor and other methods omitted, see below
...
virtual int getFoo(size_t k) {return foo[k];}
virtual void setFoo(size_t k, int x) {foo[k]=x;}
virtual void addFoo(int x) {foo.push_back(x);}
virtual void setFooArraySize(size_t size) {foo.resize(size);}
virtual size_t getFooArraySize() const {return foo.size();}
};
Register_Class(FooPacket);
Some additional boilerplate code is needed so that the class conforms to conventions, and duplication and copying work properly:
FooPacket(const char *name=nullptr, int kind=0) : FooPacket_Base(name,kind) {
}
FooPacket(const FooPacket& other) : FooPacket_Base(other.getName()) {
operator=(other);
}
FooPacket& operator=(const FooPacket& other) {
if (&other==this) return *this;
FooPacket_Base::operator=(other);
foo = other.foo;
return *this;
}
virtual FooPacket *dup() {
return new FooPacket(*this);
}
6.11 Descriptor Classes¶
For each generated class and struct, the message compiler also generates an associated descriptor class. This class carries “reflection” information about the new class. The descriptor class encapsulates virtually all the information that the original message definition contains, and exposes it via member functions. Reflection information allows inspecting object contents down to the field level in Qtenv, filtering objects by a filter expression that refers to object fields, serializing messages-packets in a readable form for the eventlog file, and has several further potential uses.
6.11.1 cClassDescriptor¶
The descriptor class is subclassed from cClassDescriptor. It has methods for enumerating fields (getFieldCount(), getFieldName(), getFieldTypeString(), etc.), for getting and setting a field's value in string form (getFieldAsString(), setFieldAsString()) and as cValue (getFieldValue(), setFieldValue()), for exploring the class hierarchy (getBaseClassDescriptor(), etc.), for accessing class and field properties, and for similar tasks.
Classes derived from cObject have a virtual member function getDescriptor() that returns their associated descriptor. For other classes, it is possible to obtain the descriptor using cClassDescriptor::getDescriptorFor() with the class name as the argument.
Several properties control the creation and details of the class descriptor.
6.11.2 Controlling Descriptor Generation¶
The @descriptor class property can be used to control the generation of the descriptor class. @descriptor(readonly) instructs the message compiler not to generate field setters for the descriptor, and @descriptor(false) instructs it not to generate a descriptor class for the class at all.
6.11.3 Generating Descriptors For Existing Classes¶
It is also possible to use (or abuse) the message compiler for generating a descriptor class for an existing class. To do that, write a message definition for your existing class (for example, if it has int getFoo() and setFoo(int) methods, add an int foo field to the message definition), and mark it with @existingClass. This will tell the message compiler that it should not generate an actual class (as it already exists), only a descriptor class.
6.11.4 Field Metadata¶
When an object is shown in Qtenv's Object Inspector pane, Qtenv obtains all the information it displays from the object's descriptor. There are several properties that can be used to customize how a field appears in the Object Inspector:
- @icon associates an icon with the field;
- @label overrides the text displayed as the field name;
- @group is used for grouping related fields;
- @hint can be used to provide a short description of the field, which Qtenv displays in a tooltip.
6.11.5 Method Name Properties¶
Several of the properties which are for overriding field accessor method names (@getter, @setter, @sizeGetter, @sizeSetter, etc., see [6.10.1]) have a secondary purpose. When generating a descriptor for an existing class (see @existingClass), those properties specify how the descriptor can access the field, i.e. what code to generate in the implementation of the descriptor's various methods. In that use case, such properties may contain code fragments or a function call template instead of a method name.
6.11.6 toString/fromString¶
To be able to generate the descriptor's getFieldValueAsString() member function, the message compiler needs to know how to convert the return type of the getter to std::string. Similarly, for setFieldValueAsString() it needs to know how to convert (or parse) a string to obtain the setter's argument type. For the built-in types (int, double, etc.) this information is pre-configured, but for other types, the user needs to supply it via two properties:
- @toString specifies the code to convert the return type of the setter to a string;
- @fromString specifies the code to convert a string to the setter's argument type.
These properties can be specified on the class (where it will be applied to fields of that type), or directly on fields. Multiple syntaxes are accepted:
- If the value starts with a dot, it is interpreted as a member function call.
- If the value contains a dollar sign, it serves as a placeholder for the value to be converted.
Example:
class IPAddress
{
@existingClass;
@opaque;
@toString(.str()); // use IPAddress::str() to produce a string
@fromString(IPAddress($)); // use constructor; '$' will be replaced by the string
}
If the @toString property is missing, the message compiler generates code that calls the str() member function on the value returned by the getter, provided that it knows for certain that the corresponding type has such a method (the type is derived from cObject, or has the @str property).
If there is no @toString property and no (known) str() method, the descriptor will return the empty string.
6.11.7 toValue/fromValue¶
Similarly to @toString/@fromString described in the previous section, the @toValue and @fromValue properties are used to define how to convert the field's value to and from cValue for the descriptor's getFieldValue() and setFieldValue() methods.
6.11.8 Field Modifiers¶
There are several boolean-valued properties that enable/disable various features in the descriptor:
- @opaque: If true, it treats the field as an atomic
(non-compound) type, i.e., having no descriptor class. When specified on a
class, it determines the default for fields of that type.
- @editable: If set, the value of the field (or value of fields
that are instances of this type) can be set via the class descriptor's
setFieldValueFromString() and setFieldValue() methods.
- @replaceable: If set, the field is a pointer whose value can
be set via the class descriptor's setFieldStructValuePointer() and
setFieldValue() methods.
- @resizable: If set, the field is a variable-size array whose
size can be set via the class descriptor's setFieldArraySize()
method.
- @readonly: This is simply a shorthand for @editable(false) @replaceable(false) @resizable(false).
7 The Simulation Library¶
OMNeT++ has an extensive C++ class library available to the user for implementing simulation models and model components. Part of the class library's functionality has already been covered in the previous chapters, including discrete event simulation basics, the simple module programming model, module parameters and gates, scheduling events, sending and receiving messages, channel operation and programming model, finite state machines, dynamic module creation, signals, and more.
This chapter discusses the rest of the simulation library. Topics will include logging, random number generation, queues, topology discovery and routing support, and statistics and result collection. This chapter also covers some of the conventions and internal mechanisms of the simulation library to allow one extending it and using it to its full potential.
7.1 Fundamentals¶
7.1.1 Using the Library¶
Classes in the OMNeT++ simulation library are part of the omnetpp namespace. To use the OMNeT++ API, one must include the omnetpp.h header file and either import the namespace with using namespace omnetpp, or qualify names with the omnetpp:: prefix.
Thus, simulation models will contain the
#include <omnetpp.h>
line, and often also
using namespace omnetpp;
When writing code that should work with various versions of OMNeT++, it is often useful to have compile-time access to the OMNeT++ version in a numeric form. The OMNETPP_VERSION macro exists for that purpose, and it is defined by OMNeT++ to hold the version number in the form major*256+minor. For example, in OMNeT++ 4.6 it was defined as
#define OMNETPP_VERSION 0x406
7.1.2 The cObject Base Class¶
Most classes in the simulation library are derived from cObject, or its subclasses cNamedObject and cOwnedObject. cObject defines several virtual member functions that are either inherited or redefined by subclasses. Otherwise, cObject is a zero-overhead class as far as memory consumption goes: it purely defines an interface but has no data members. Thus, having cObject as a base class does not add anything to the size of a class if it already has at least one virtual member function.

The subclasses cNamedObject and cOwnedObject add data members to implement more functionality. The following sections discuss some of the practically important functionality defined by cObject.
7.1.2.1 Name and Full Name¶
The most useful and most visible member functions of cObject are getName() and getFullName(). The idea behind them is that many objects in OMNeT++ have names by default (for example, modules, parameters and gates), and even for other objects, having a printable name is a huge gain when it comes to logging and debugging.
getFullName() is important for gates and modules, which may be part of gate or module vectors. For them, getFullName() returns the name with the index in brackets, while getName() only returns the name of the module or gate vector. That is, for a gate out[3] in the gate vector out[10], getName() returns "out", and getFullName() returns "out[3]". For other objects, getFullName() simply returns the same string as getName(). An example:
cGate *gate = gate("out", 3); // out[3]
EV << gate->getName(); // prints "out"
EV << gate->getFullName(); // prints "out[3]"
- NOTE
When printing out the name of an object, prefer getFullName() to getName(), especially if the runtime type is not known. This will ensure that the vector index will also be printed if the object has one.
cObject merely defines these member functions, but they return an empty string. Actual storage for a name string and a setName() method is provided by the class cNamedObject, which is also an (indirect) base class for most library classes. Thus, one can assign names to nearly all user-created objects. It is also recommended to do so, because a name makes an object easier to identify in graphical runtimes like Qtenv.
By convention, the object name is the first argument to the constructor of every class, and it defaults to the empty string. To create an object with a name, pass the name string (a const char* pointer) as the first argument of the constructor. For example:
cMessage *timeoutMsg = new cMessage("timeout");
To change the name of an object, use setName():
timeoutMsg->setName("timeout");
Both the constructor and setName() make an internal copy of the string,
instead of just storing the pointer passed to them.
- [
In a simulation, there are usually many objects with the same name:
modules, parameters, gates, etc. To conserve memory, several classes
keep names in a shared, reference-counted name pool instead of
making separate copies for each object. The runtime cost of looking up an
existing string in the name pool and incrementing its reference count
also compares favorably to the cost of allocation and copying.]
For convenience and efficiency reasons, the empty string "" and nullptr are treated as interchangeable by library objects. That is, "" is stored as nullptr but returned as "". If one creates a message object with either nullptr or "" as its name string, it will be stored as nullptr, and getName() will return a pointer to a static "".
7.1.2.2 Hierarchical Name¶
getFullPath() returns the object's hierarchical name. This name is produced by prepending the full name (getFullName()) with the parent or owner object's getFullPath(), separated by a dot. For example, if the out[3] gate in the previous example belongs to a module named classifier, which in turn is part of a network called Queueing, then the gate's getFullPath() method will return "Queueing.classifier.out[3]".
cGate *gate = gate("out", 3); // out[3]
EV << gate->getName(); // prints "out"
EV << gate->getFullName(); // prints "out[3]"
EV << gate->getFullPath(); // prints "Queueing.classifier.out[3]"
The getFullName() and getFullPath() methods are extensively used in graphical runtime environments like Qtenv, and also when assembling runtime error messages.
In contrast to getName() and getFullName() which return const char * pointers, getFullPath() returns std::string. This makes no difference when logging via EV<<, but when getFullPath() is used as a "%s" argument to sprintf(), one needs to write getFullPath().c_str().
char buf[100];
sprintf("msg is '%80s'", msg->getFullPath().c_str()); // note c_str()
7.1.2.3 Class Name¶
The getClassName() member function returns the class name as a string, including the namespace. getClassName() internally relies on C++ RTTI.
An example:
const char *className = msg->getClassName(); // returns "omnetpp::cMessage"
7.1.2.4 Cloning Objects¶
The dup() member function creates an exact copy of the object, duplicating contained objects also if necessary. This is especially useful in the case of message objects.
cMessage *copy = msg->dup();
dup() delegates to the copy constructor. Classes also declare an assignment operator (operator=()) which can be used to copy the contents of an object into another object of the same type. dup(), the copy constructor and the assignment operator all perform deep copying: objects contained in the copied object will also be duplicated if necessary.
operator=() differs from the other two in that it does not copy the object's name string, i.e. does not invoke setName(). The rationale is that the name string is often used for identifying the particular object instance, as opposed to being considered part of its contents.
7.1.3 Iterators¶
There are several container classes in the library (cQueue, cArray, etc.) For many of them, there is a corresponding iterator class that one can use to loop through the objects stored in the container.
For example:
cQueue queue;
//...
for (cQueue::Iterator it(queue); !it.end(); ++it) {
cObject *containedObject = *it;
//...
}
7.1.4 Runtime Errors¶
When library objects detect an error condition, they throw a C++ exception. This exception is then caught by the simulation environment, which pops up an error dialog or displays the error message.
At times it can be useful to be able to stop the simulation at the place of the error (just before the exception is thrown) and use a C++ debugger to look at the stack trace and examine variables. Enabling the debug-on-errors or the debugger-attach-on-error configuration option lets you do that -- check it in section [11.12].
7.2 Logging from Modules¶
In a simulation, there are often thousands of modules which simultaneously carry out non-trivial tasks. In order to understand a complex simulation, it is essential to know the inputs and outputs of algorithms, the information on which decisions are based, and the performed actions along with their parameters. In general, logging facilitates understanding which module is doing what and why.
OMNeT++ makes logging easy and consistent among simulation models by providing its own C++ API and configuration options. The API provides efficient logging with several predefined log levels, global compile-time and runtime filters, per-component runtime filters, automatic context information, log prefixes, and other useful features. In the following sections, we look at how to write log statements using the OMNeT++ logging API.
7.2.1 Log Output¶
The exact way log messages are displayed to the user depends on the user interface. In the command-line user interface (Cmdenv), the log is simply written to the standard output. In the Qtenv graphical user interface, the main window has an area for displaying the log output from the currently displayed compound module.
7.2.2 Log Levels¶
All logging must be categorized into one of the predefined log levels. The assigned log level determines how important and how detailed a log statement is. When deciding which log level is appropriate for a particular log statement, keep in mind that they are meant to be local to components. There's no need for a global agreement among all components, because OMNeT++ provides per component filtering. Log levels are mainly useful because log output can be filtered based on them.
- LOGLEVEL_OFF completely disables logging.
- LOGLEVEL_FATAL is the highest log level. It should be used for fatal (unrecoverable) errors that prevent the component from further operation. It doesn't mean that the simulation must stop immediately (because in such cases the code should throw a cRuntimeError), but rather that a component is unable to continue normal operation. For example, a special-purpose recording component may be unable to continue recording due to the disk being full.
- LOGLEVEL_ERROR should be used for recoverable (non-fatal) errors that allow the component to continue normal operation. For example, a MAC layer protocol component could log unsuccessful packet receptions and unsuccessful packet transmissions using this level.
- LOGLEVEL_WARN should be used for exceptional (non-error) situations that may be important for users and rarely occur in the component. For example, a MAC layer protocol component could log detected bit errors using this level.
- LOGLEVEL_INFO should be used for high-level protocol-specific details that are most likely important for the users of the component. For example, a MAC layer protocol component could log successful packet receptions and successful packet transmissions using this level.
- LOGLEVEL_DETAIL should be used for low-level protocol-specific details that may be useful and understandable to the users of the component. These messages may help to track down various protocol-specific issues without actually looking too deeply into the code. For example, a MAC layer protocol component could log state machine updates, acknowledge timeouts, and selected back-off periods using this level.
- LOGLEVEL_DEBUG should be used for high-level implementation-specific technical details that are most likely important for the developers of the component. These messages may help to debug various issues when one is looking at the code. For example, a MAC layer protocol component could log updates to internal state variables, updates to complex data structures using this level.
- LOGLEVEL_TRACE is the lowest log level. It should be used for low-level implementation-specific technical details that are mostly useful for the developers of the component. For example, a MAC layer protocol component could log control flow in loops and if statements, and entering/leaving methods and code blocks using this level.
7.2.3 Log Statements¶
OMNeT++ provides several C++ macros for the actual logging. Each one of these macros acts like a C++ stream, so they can be used similarly to std::cout with operator<< (shift operator).
- EV_FATAL for LOGLEVEL_FATAL
- EV_ERROR for LOGLEVEL_ERROR
- EV_WARN for LOGLEVEL_WARN
- EV_INFO for LOGLEVEL_INFO
- EV_DETAIL for LOGLEVEL_DETAIL
- EV_DEBUG for LOGLEVEL_DEBUG
- EV_TRACE for LOGLEVEL_TRACE
- EV is provided for backward compatibility, and defaults to EV_INFO
The actual logging is as simple as writing information into one of these special log streams as follows:
EV_ERROR << "Connection to server is lost.\n";
EV_WARN << "Queue is full, discarding packet.\n";
EV_INFO << "Packet received, sequence number = " << seqNum << "." << endl;
EV_TRACE << "routeUnicastPacket(" << packet << ");" << endl;
- NOTE
It is not recommended to use plain printf() or std::cout for logging. Output from EV_INFO and the other log macros can be controlled more easily from omnetpp.ini, and it is more convenient to view using Qtenv.
The above C++ macros work well from any C++ class, including OMNeT++ modules. In fact, they automatically capture several context-specific information such as the current event, current simulation time, context module, this pointer, source file, and line number. The final log lines will be automatically extended with a prefix that is created from the captured information (see section [10.6]).
In static class member functions or in non-class member functions, an extra
EV_STATICCONTEXT macro must be present to make sure that normal log
macros compile.
- [This is due to the fact that in C++ it is impossible
to determine at compile-time whether a this pointer is accessible.]
void findModule(const char *name, cModule *from)
{
EV_STATICCONTEXT;
EV_TRACE << "findModule(" << name << ", " << from << ");" << endl;
7.2.4 Log Categories¶
Sometimes it might be useful to further classify log statements into user-defined log categories. In the OMNeT++ logging API, a log category is an arbitrary string provided by the user.
For example, a module test may check for a specific log message in the test's output. Putting the log statement into the test category ensures that extra care is taken when someone changes the wording in the statement to match the one in the test.
Similarly to the normal C++ log macros, there are separate log macros for each log level which also allow specifying the log category. Their name is the same as the normal variants' but simply extended with the _C suffix. They take the log category as the first parameter before any shift operator calls:
EV_INFO_C("test") << "Received " << numPacket << " packets in total.\n";
7.2.5 Composition and New Lines¶
Occasionally it's easier to produce a log line using multiple statements. Mostly because some computation has to be done between the parts. This can be achieved by omitting the new line from the log statements which are to be continued. And then subsequent log statements must use the same log level, otherwise, an implicit new line would be inserted.
EV_INFO << "Line starts here, "; ... // some other code without logging EV_INFO << "and it continues here" << endl;
Assuming a simple log prefix that prints the log level in brackets, the above code fragment produces the following output in Cmdenv:
[INFO] Line starts here, and it continues here
Sometimes it might be useful to split a line into multiple lines to achieve better formatting. In such cases, there's no need to write multiple log statements. Simply insert new lines into the sequence of shift operator calls:
EV_INFO << "First line" << endl << "second line" << endl;
In the produced output, each line will have the same log prefix, as shown below:
[INFO] First line [INFO] Second line
The OMNeT++ logging API also supports direct printing to a log stream. This is mainly useful when printing is really complicated algorithmically (e.g., printing a multi-dimensional value). The following code could produce multiple log lines each having the same log prefix.
void Matrix::print(std::stream &output) { ... }
void Matrix::someFunction()
{
print(EV_INFO);
7.2.6 Implementation¶
OMNeT++ does its best to optimize the performance of logging. The implementation fully supports conditional compilation of log statements based on their log level. It automatically checks whether the log is recorded anywhere. It also checks global and per-component runtime log levels. The latter is efficiently cached in the components for subsequent checks. See section [10.6] for more details on how to configure these log levels.
The implementation of the C++ log macros makes use of the fact that the operator<< is bound more loosely than the conditional operator (?:). This solves conditional compilation, and also helps runtime checks by redirecting the output to a null stream. Unfortunately, the operator<< calls are still evaluated on the null stream, even if the log level is disabled.
Rarely, just the computation of log statement parameters may be very expensive, and thus it must be avoided if possible. In this case, it is a good idea to make the log statement conditional on whether the output is actually being displayed or recorded anywhere. The cEnvir::isLoggingEnabled() call returns false when the output is disabled, such as in “express” mode. Thus, one can write code like this:
if (!getEnvir()->isLoggingEnabled())
EV_DEBUG << "CRC: " << computeExpensiveCRC(packet) << endl;
7.3 Random Number Generators¶
Random numbers in simulations are usually not truly random. Rather, they are produced using deterministic algorithms. Based on some internal state, the algorithm performs some deterministic computation to produce a “random” number and the next state. Such algorithms and their implementations are called random number generators or RNGs, or sometimes pseudo-random number generators (PRNGs) to highlight their deterministic nature. The algorithm's internal state is usually initialized from a smaller seed value.
Starting from the same seed, RNGs always produce the same sequence of random numbers. This is a useful and significantly important property, because it makes simulation runs repeatable.
RNGs are rarely used directly because they produce uniformly distributed random numbers. When non-uniform random numbers are needed, mathematical transformations are used to produce random numbers from RNG input that correspond to specific distributions. This is called random variate generation, and it will be covered in the next section, [7.4].
It is often advantageous for simulations to use random numbers from multiple RNG instances. For example, a wireless network simulation may use one RNG for generating traffic and another RNG for simulating transmission errors in the noisy wireless channel. Since seeds for individual RNGs can be configured independently, this arrangement allows one to perform several simulation runs with the same traffic but with bit errors occurring in different places. A simulation technique called variance reduction is also related to the use of different random number streams. OMNeT++ makes it easy to use multiple RNGs in various flexible configurations.
When assigning seeds, it is important that different RNGs and also different simulation runs use non-overlapping series of random numbers. Overlap in the generated random number sequences can introduce unwanted correlation in the simulation results.
7.3.1 RNG Implementations¶
OMNeT++ comes with the following RNG implementations.
7.3.1.1 Mersenne Twister¶
By default, OMNeT++ uses the Mersenne Twister RNG (MT) by M. Matsumoto and T. Nishimura [Matsumoto98]. MT has a period of 219937-1, and a 623-dimensional equidistribution property is assured. MT is also very fast: as fast or faster than ANSI C's rand().
7.3.1.2 The "Minimal Standard" RNG¶
OMNeT++ releases prior to 3.0 used a linear congruential generator (LCG) with a cycle length of 231-2, described in [Jain91], pp. 441-444,455. This RNG is still available and can be selected from omnetpp.ini (Chapter [11]). This RNG is only suitable for small-scale simulation studies. As shown by Karl Entacher et al. in [Entacher02], the cycle length of about 231 is too small (on today's fast computers it is easy to exhaust all random numbers), and the structure of the generated “random” points is too regular. The [Hellekalek98] paper provides a broader overview of issues associated with RNGs used for simulation, and it is well worth reading. It also contains useful links and references on the topic.
7.3.1.3 The Akaroa RNG¶
When a simulation is executed under Akaroa control (see section [11.20]), it is also possible to let OMNeT++ use Akaroa's RNG. This needs to be configured in omnetpp.ini (section [10.5]).
7.3.1.4 Other RNGs¶
OMNeT++ allows the plugging in of your own RNGs as well. This mechanism, based on the cRNG interface, is described in section [17.5]. For example, one candidate to include could be L'Ecuyer's CMRG [LEcuyer02] which has a period of about 2191 and can provide a large number of guaranteed independent streams.
7.3.2 Global and Component-Local RNGs¶
OMNeT++ can be configured to make several RNGs available for the simulation model. These global or physical RNGs are numbered from 0 to numRNGs-1, and can be seeded independently.
However, usually model code doesn't directly work with those RNGs. Instead, there is an indirection step introduced for additional flexibility. When random numbers are drawn in a model, the code usually refers to component-local or logical RNG numbers. These local RNG numbers are mapped to global RNG indices to arrive at actual RNG instances. This mapping occurs on a per-component basis. That is, each module and channel object contains a mapping table similar to the following:
| Local RNG index | Global RNG | |
| 0 | --> | 0 |
| 1 | --> | 0 |
| 2 | --> | 2 |
| 3 | --> | 1 |
| 4 | --> | 1 |
| 5 | --> | 3 |
In the example, the module or channel in question has 6 local (logical) RNGs that map to 4 global (physical) RNGs.
- NOTE
Local RNG number 0 is special in the sense that all random number functions use that RNG, unless explicitly told otherwise by specifying an rng=k argument.
The local-to-global mapping, as well as the number of global RNGs and their seeding can be configured in omnetpp.ini (see section [10.5]).
The mapping can be set up arbitrarily, with the default being an identity mapping (that is, local RNG k refers to global RNG k.) The mapping allows for flexibility in RNG and random number streams configuration -- even for simulation models that were not written with RNG awareness. For example, even if modules in a simulation only use the default, local RNG number 0, one can set up a mapping so that different groups of modules use different physical RNGs.
In theory, RNGs could also be instantiated and used directly from C++ model code. However, doing so is not recommended because the model would lose configurability via omnetpp.ini.
7.3.3 Accessing the RNGs¶
RNGs are represented via subclasses of the abstract class cRNG. In addition to random number generation methods like intRand() and doubleRand(), the cRNG interface also includes methods like selfTest() for basic integrity checking and getNumbersDrawn() to query the number of random numbers generated.
RNGs can be accessed by local RNG number via cComponent's getRNG(k) method. To access global RNGs directly by their indices, one can use cEnvir's getRNG(k) method. However, RNGs rarely need to be accessed directly. Most simulations will only use them via random variate generation functions, described in the next section.
7.4 Generating Random Variates¶
Random numbers produced by RNGs are uniformly distributed. This section describes how to obtain streams of non-uniformly distributed random numbers from various distributions.
The simulation library supports the following distributions:
| Distribution | Description |
| Continuous distributions | |
| uniform(a, b) | uniform distribution in the range [a,b) |
| exponential(mean) | exponential distribution with the given mean |
| normal(mean, stddev) | normal distribution with the given mean and standard deviation |
| truncnormal(mean, stddev) | normal distribution truncated to nonnegative values |
| gamma_d(alpha, beta) | gamma distribution with parameters alpha>0, beta>0 |
| beta(alpha1, alpha2) | beta distribution with parameters alpha1>0, alpha2>0 |
| erlang_k(k, mean) | Erlang distribution with k>0 phases and the given mean |
| chi_square(k) | chi-square distribution with k>0 degrees of freedom |
| student_t(i) | student-t distribution with i>0 degrees of freedom |
| cauchy(a, b) | Cauchy distribution with parameters a,b where b>0 |
| triang(a, b, c) | triangular distribution with parameters a<=b<=c, a!=c |
| lognormal(m, s) | lognormal distribution with mean m and variance s>0 |
| weibull(a, b) | Weibull distribution with parameters a>0, b>0 |
| pareto_shifted(a, b, c) | generalized Pareto distribution with parameters a, b and shift c |
| Discrete distributions | |
| intuniform(a, b) | uniform integer from a..b |
| bernoulli(p) | result of a Bernoulli trial with probability 0<=p<=1 (1 with probability p and 0 with probability (1-p)) |
| binomial(n, p) | binomial distribution with parameters n>=0 and 0<=p<=1 |
| geometric(p) | geometric distribution with parameter 0<=p<=1 |
| negbinomial(n, p) | negative binomial distribution with parameters n>0 and 0<=p<=1 |
| poisson(lambda) | Poisson distribution with parameter lambda |
Some notes:
- intuniform() generates integers including both the lower and upper limit, so for example the outcome of tossing a coin could be written as intuniform(1,2).
- truncnormal() is the normal distribution truncated to nonnegative values; its implementation generates a number with normal distribution and if the result is negative, it keeps generating other numbers until the outcome is nonnegative.
There are several ways to generate random numbers from these distributions, as described in the next sections.
7.4.1 Component Methods¶
The preferred way is to use methods defined on cComponent, the common base class of modules and channels:
double uniform(double a, double b, int rng=0) const; double exponential(double mean, int rng=0) const; double normal(double mean, double stddev, int rng=0) const; ...
These methods work with the component's local RNGs, and accept the RNG index (default 0) in their extra int parameter.
Since most simulation code is located in methods of simple modules, these methods can usually be called in a concise way, without an explicit module or channel pointer. An example:
scheduleAt(simTime() + exponential(1.0), msg);
There are two additional methods, intrand() and dblrand(). intrand(n) generates random integers in the range [0, n-1], and dblrand() generates a random double on [0,1). They also accept an additional local RNG index that defaults to 0.
7.4.2 Random Number Stream Classes¶
It is sometimes useful to be able to pass around random variate generators as objects. The classes cUniform, cExponential, cNormal, etc. fulfill this need.
These classes subclass from the cRandom abstract class. cRandom was designed to encapsulate random number streams. Its most important method is draw() that returns a new random number from the stream. cUniform, cExponential and other classes essentially bind the distribution's parameters and an RNG to the generation function.

Let us see for example cNormal. The constructor expects an RNG (cRNG pointer) and the parameters of the distribution, mean and standard deviation. It also has a default constructor, as it is a requirement for Register_Class(). When the default constructor is used, the parameters can be set with setRNG(), setMean() and setStddev(). setRNG() is defined on cRandom. The draw() method, of course, is redefined to return a random number from the normal distribution.
An example that shows the use of a random number stream as an object:
cNormal *normal = new cNormal(getRNG(0), 0, 1); // unit normal distr.
printRandomNumbers(normal, 10);
...
void printRandomNumbers(cRandom *rand, int n)
{
EV << "Some numbers from a " << rand->getClassName() << ":" << endl;
for (int i = 0; i < n; i++)
EV << rand->draw() << endl;
}
Another important property of cRandom is that it can encapsulate state. That is, subclasses can be implemented that, for example, return autocorrelated numbers, numbers from a stochastic process, or simply elements of a stored sequence (e.g. one loaded from a trace file).
7.4.3 Generator Functions¶
Both the cComponent methods and the random number stream classes described above have been implemented with the help of standalone generator functions. These functions take a cRNG pointer as their first argument.
double uniform(cRNG *rng, double a, double b); double exponential(cRNG *rng, double mean); double normal(cRNG *rng, double mean, double stddev); ...
7.4.4 Random Numbers from Histograms¶
One can also specify a distribution as a histogram. The cHistogram, cKSplit and cPSquare classes can be used to generate random numbers from histograms. This feature is documented later, with the statistical classes.
7.4.5 Adding New Distributions¶
One can easily add support for new distributions. We recommend that you write a standalone generator function first. Then you can add a cRandom subclass that wraps it, and/or module (channel) methods that invoke it with the module's local RNG. If the function is registered with the Define_NED_Function() macro (see [7.12]), it will be possible to use the new distribution in NED files and ini files, as well.
If you need a random number stream that has state, you need to subclass from cRandom.
7.5 Container Classes¶
7.5.1 Queue class: cQueue¶
7.5.1.1 Basic Usage¶
cQueue is a container class that acts as a queue. cQueue can hold objects of types derived from cObject (almost all classes from the OMNeT++ library), such as cMessage, cPar, etc. Normally, new elements are inserted at the back and removed from the front.

The member functions dealing with insertion and removal are insert() and pop().
cQueue queue("my-queue");
cMessage *msg;
// insert messages
for (int i = 0; i < 10; i++) {
msg = new cMessage;
queue.insert(msg);
}
// remove messages
while(!queue.isEmpty()) {
msg = (cMessage *)queue.pop();
delete msg;
}
The length() member function returns the number of items in the queue, and empty() tells whether there is anything in the queue.
There are other functions dealing with insertion and removal. The insertBefore() and insertAfter() functions insert a new item exactly before or after a specified one, regardless of the ordering function.
The front() and back() functions return pointers to the objects at the front and back of the queue, without affecting queue contents.
The pop() function can be used to remove items from the tail of the queue, and the remove() function can be used to remove any item known by its pointer from the queue:
queue.remove(msg);
7.5.1.2 Priority Queue¶
By default, cQueue implements a FIFO, but it can also act as a priority queue; that is, it can keep the inserted objects ordered. To use this feature, one needs to provide a comparison function that takes two cObject pointers and returns -1, 0, or 1 (see the reference for details). An example of setting up an ordered cQueue:
cQueue queue("queue", someCompareFunc);
If the queue object is set up as an ordered queue, the insert() function uses the ordering function: it searches the queue contents from the head until it reaches the position where the new item needs to be inserted and inserts it there.
7.5.1.3 Iterators¶
The cQueue::Iterator class lets one iterate over the contents of the queue and examine each object.
The cQueue::Iterator constructor expects the queue object in the first argument. Normally, forward iteration is assumed, and the iteration is initialized to point at the front of the queue. For reverse iteration, specify reverse=true as the optional second argument. After that, the class acts as any other OMNeT++ iterator: one can use the ++ and -- operators to advance it, the * operator to get a pointer to the current item, and the end() member function to check whether the iterator has reached the end (or the beginning) of the queue.
Forward iteration:
for (cQueue::Iterator iter(queue); !iter.end(); iter++) {
cMessage *msg = (cMessage *) *iter;
//...
}
Reverse iteration:
for (cQueue::Iterator iter(queue, true); !iter.end(); iter--) {
cMessage *msg = (cMessage *) *iter;
//...
}
7.5.2 Expandable Array: cArray¶
7.5.2.1 Basic Usage¶
cArray is a container class that holds objects derived from cObject. cArray implements a dynamic-size array: its capacity grows automatically when it becomes full. cArray stores pointers to objects inserted instead of making copies.
Creating an array:
cArray array("array");
Adding an object at the first free index:
cMsgPar *p = new cMsgPar("par");
int index = array.add(p);
Adding an object at a given index (if the index is occupied, you will get an error message):
cMsgPar *p = new cMsgPar("par");
int index = array.addAt(5,p);
Finding an object in the array:
int index = array.find(p);
Getting a pointer to an object at a given index:
cPar *p = (cPar *) array[index];
You can also search the array or get a pointer to an object by the object's name:
int index = array.find("par");
Par *p = (cPar *) array["par"];
You can remove an object from the array by calling remove() with the object name, the index position, or the object pointer:
array.remove("par");
array.remove(index);
array.remove(p);
The remove() function doesn't deallocate the object; it returns the object pointer. If you also want to deallocate it, you can write:
delete array.remove(index);
7.5.2.2 Iteration¶
cArray has no iterator, but it is easy to loop through all the indices with an integer variable. The size() member function returns the largest index plus one.
for (int i = 0; i < array.size(); i++) {
if (array[i]) { // is this position used?
cObject *obj = array[i];
EV << obj->getName() << endl;
}
}
7.6 Routing Support: cTopology¶
7.6.1 Overview¶
The cTopology class was designed primarily to support routing in communication networks.
A cTopology object stores an abstract representation of the network in a graph form:
- each cTopology node corresponds to a module (simple or compound), and
- each cTopology edge corresponds to a link or series of connecting links.
One can specify which modules to include in the graph. Compound modules may also be selected. The graph will include all connections among the selected modules. In the graph, all nodes are at the same level; there is no submodule nesting. Connections that span across compound module boundaries are also represented as one graph edge. Graph edges are directed, just as module gates are.
If you are writing a router or switch model, the cTopology graph can help you determine what nodes are available through which gate and also find optimal routes. The cTopology object can calculate shortest paths between nodes for you.
The mapping between the graph (nodes, edges) and the network model (modules, gates, connections) is preserved: one can find the corresponding module for a cTopology node and vice versa.
7.6.2 Basic Usage¶
The cTopology class provides powerful functionality for extracting and analyzing network topology. It creates a graph representation where nodes correspond to modules (simple or compound) and edges correspond to connections between these modules.
7.6.2.1 Extracting the Topology¶
The network topology can be extracted into a cTopology object with a single method call. There are several ways to specify which modules should be included in the topology:
- By NED types: Include modules based on their NED type names
- By module paths: Include modules whose paths match specified patterns
- By property: Include modules that have a specific property
- By parameter: Include modules with a specific parameter (optionally with a specific value)
- By predicate function: Include modules that satisfy a custom condition
The cTopology class provides a corresponding extraction method for each approach:
// Extract by fully qualified NED type name
std::vector<std::string> types = {"acme.Host", "acme.Router"}; // made-up names
topo.extractByNedTypeName(types);
// Extract by module path pattern
std::vector<std::string> patterns = {"**.host[*]", "**.router*"};
topo.extractByModulePath(patterns);
// Extract by property
topo.extractByProperty("networkNode"); // modules with @networkNode property
// Extract by parameter
topo.extractByParameter("forwarding", "true"); // modules with forwarding=true
The most flexible approach is using a predicate function with extractFromNetwork(), which accepts a lambda function in modern C++. This allows for complex selection criteria:
// Select all top-level modules of type "Node"
cModule *root = getSimulation()->getSystemModule();
topo.extractFromNetwork([=](cModule *mod) {
return mod->getParentModule() == root && mod->getNedTypeName()=="Node";
});
// Select modules that have a submodule named 'ipv4' whose
// 'forwarding' parameter is set to true
topo.extractFromNetwork([](cModule *mod) {
cModule *ipv4 = mod->getSubmodule("ipv4");
if (!ipv4)
return false;
return ipv4->par("forwarding").boolValue();
});
7.6.2.2 Exploring the Topology¶
A cTopology object uses the following classes to represent the graph:
- cTopology::Node: Represents a module in the network
- cTopology::Link: Base class for edges in the graph
- cTopology::LinkIn and cTopology::LinkOut: Specialized views of a Link that provide convenient access to the "local" and "remote" ends of a connection
Once you have extracted the topology, you can explore it using the following methods:
// Create and extract the topology
cTopology topo("network topology");
topo.extractByProperty("node"); // extract all modules with @node property
// Iterate through all nodes
for (int i = 0; i < topo.getNumNodes(); i++) {
cTopology::Node *node = topo.getNode(i);
// Get the corresponding module
cModule *mod = node->getModule();
EV << "Node " << i << ": " << mod->getFullPath() << endl;
// Examine outgoing connections
EV << " Outgoing connections: " << node->getNumOutLinks() << endl;
for (int j = 0; j < node->getNumOutLinks(); j++) {
cTopology::LinkOut *link = node->getLinkOut(j);
// Get the remote node and the connecting gates
cTopology::Node *neighborNode = link->getRemoteNode();
cModule *neighbor = neighborNode->getModule();
cGate *localGate = link->getLocalGate();
cGate *remoteGate = link->getRemoteGate();
EV << " -> " << neighbor->getFullPath()
<< " via " << localGate->getFullName()
<< " -> " << remoteGate->getFullName() << endl;
}
// Examine incoming connections
EV << " Incoming connections: " << node->getNumInLinks() << endl;
for (int j = 0; j < node->getNumInLinks(); j++) {
cTopology::LinkIn *link = node->getLinkIn(j);
// Get the remote node and the connecting gates
cTopology::Node *neighborNode = link->getRemoteNode();
cModule *neighbor = neighborNode->getModule();
cGate *localGate = link->getLocalGate();
cGate *remoteGate = link->getRemoteGate();
EV << " <- " << neighbor->getFullPath()
<< " via " << localGate->getFullName()
<< " <- " << remoteGate->getFullName() << endl;
}
}
Several functions used in the above code fragment will be explained in the next sections.
7.6.2.3 Finding Specific Nodes¶
You can find the topology node that corresponds to a specific module using the getNodeFor() method:
// Find a specific module in the network
cModule *targetModule = getModuleByPath("Network.server");
// Get the corresponding node in the topology
cTopology::Node *node = topo.getNodeFor(targetModule);
if (node != nullptr) {
// The module is part of the extracted topology
EV << "Found node for " << targetModule->getFullPath() << endl;
// Now we can analyze its connections
EV << "It has " << node->getNumOutLinks() << " outgoing connections" << endl;
} else {
// The module was not included in the extracted topology
EV << targetModule->getFullPath() << " is not part of the topology" << endl;
}
7.6.2.4 Understanding LinkIn and LinkOut¶
The cTopology::Link class represents a connection in the graph, but it is rarely used directly. Instead, cTopology::LinkIn and cTopology::LinkOut provide convenient views of the same link from the perspective of a specific node:
- LinkOut: Represents an outgoing connection from the current node's perspective
- LinkIn: Represents an incoming connection from the current node's perspective
Both classes provide methods like getLocalNode(), getRemoteNode(), getLocalGate(), and getRemoteGate() that return the appropriate ends of the connection relative to the current node. This makes traversing the graph more intuitive:
// For an outgoing link from node A to node B: cTopology::LinkOut *outLink = nodeA->getLinkOut(j); cTopology::Node *nodeB = outLink->getRemoteNode(); // Returns node B cGate *localGate = outLink->getLocalGate(); // Returns gate in node A cGate *remoteGate = outLink->getRemoteGate(); // Returns gate in node B // For the same link, but viewed as an incoming link to node B: cTopology::LinkIn *inLink = nodeB->getLinkIn(k); cTopology::Node *nodeA = inLink->getRemoteNode(); // Returns node A cGate *localGate = inLink->getLocalGate(); // Returns gate in node B cGate *remoteGate = inLink->getRemoteGate(); // Returns gate in node A
This design makes it easy to traverse the graph in either direction while maintaining a consistent "local" and "remote" terminology.
7.6.3 Shortest Paths¶
The real power of cTopology is in finding shortest paths in the network to support optimal routing. cTopology finds the shortest paths from all nodes to a target node. The algorithm is computationally inexpensive. In the simplest case, all edges are assumed to have the same weight.
A real-life example assumes we have the target module pointer; finding the shortest path to the target looks like this:
cModule *targetmodulep =...; cTopology::Node *targetnode = topo.getNodeFor(targetmodulep); topo.calculateUnweightedSingleShortestPathsTo(targetnode);
This performs the Dijkstra algorithm and stores the result in the cTopology object. The result can then be extracted using cTopology and cTopology::Node methods. Naturally, each call to calculateUnweightedSingleShortestPathsTo() overwrites the results of the previous call.
Walking along the path from our module to the target node:
cTopology::Node *node = topo.getNodeFor(this);
if (node == nullptr) {
EV << "We (" << getFullPath() << ") are not included in the topology.\n";
}
else if (node->getNumPaths()==0) {
EV << "No path to destination.\n";
}
else {
while (node != topo.getTargetNode()) {
EV << "We are in " << node->getModule()->getFullPath() << endl;
EV << node->getDistanceToTarget() << " hops to go\n";
EV << "There are " << node->getNumPaths()
<< " equally good directions, taking the first one\n";
cTopology::LinkOut *path = node->getPath(0);
EV << "Taking gate " << path->getLocalGate()->getFullName()
<< " we arrive in " << path->getRemoteNode()->getModule()->getFullPath()
<< " on its gate " << path->getRemoteGate()->getFullName() << endl;
node = path->getRemoteNode();
}
}
The purpose of the getDistanceToTarget() member function of a node is self-explanatory. In the unweighted case, it returns the number of hops. The getNumPaths() member function returns the number of edges that are part of a shortest path, and path(i) returns the ith edge of them as cTopology::LinkOut. If the shortest paths were created by the ...SingleShortestPaths() function, getNumPaths() will always return 1 (or 0 if the target is not reachable), that is, only one of the several possible shortest paths is found. The ...MultiShortestPathsTo() functions find all paths at increased run-time cost. The cTopology's getTargetNode() function returns the target node of the last shortest path search.
You can enable/disable nodes or edges in the graph. This is done by calling their enable() or disable() member functions. Disabled nodes or edges are ignored by the shortest paths calculation algorithm. The isEnabled() member function returns the state of a node or edge in the topology graph.
One usage of disable() is when you want to determine how many hops the target node can be reached from our node through a particular output gate. To compute this, you compute the shortest paths to the target from the neighbor node while disabling the current node to prevent the shortest paths from going through it:
cTopology::Node *thisnode = topo.getNodeFor(this);
thisnode->disable();
topo.calculateUnweightedSingleShortestPathsTo(targetnode);
thisnode->enable();
for (int j = 0; j < thisnode->getNumOutLinks(); j++) {
cTopology::LinkOut *link = thisnode->getLinkOut(i);
EV << "Through gate " << link->getLocalGate()->getFullName() << " : "
<< 1 + link->getRemoteNode()->getDistanceToTarget() << " hops" << endl;
}
In the future, other shortest path algorithms will also be implemented:
unweightedMultiShortestPathsTo(cTopology::Node *target); weightedSingleShortestPathsTo(cTopology::Node *target); weightedMultiShortestPathsTo(cTopology::Node *target);
7.6.4 Manipulating the graph¶
cTopology also has methods that let one manipulate the stored graph, or even, build a graph from scratch. These methods are addNode(), deleteNode(), addLink() and deleteLink().
When extracting the topology from the network, cTopology uses the factory methods createNode() and createLink() to instantiate the node and link objects. These methods may be overridden by subclassing cTopology if the need arises, for example when it is useful to be able to store additional information in those objects.
7.7 Pattern Matching¶
Since version 4.3, OMNeT++ contains two utility classes for pattern matching, cPatternMatcher and cMatchExpression.
cPatternMatcher is a glob-style pattern matching class, adapted to special OMNeT++ requirements. It recognizes wildcards, character ranges, and numeric ranges, and supports options such as case sensitivity and whole string matching. cMatchExpression builds on top of cPatternMatcher and extends it in two ways: first, it allows you to combine patterns with AND, OR, NOT into boolean expressions, and second, it applies the pattern expressions to objects instead of text. These classes are especially useful for making model-specific configuration files more concise or more powerful by introducing patterns.
7.7.1 cPatternMatcher¶
cPatternMatcher holds a pattern string and several option flags, and has a matches() boolean function that determines whether the string passed as an argument matches the pattern with the given flags. The pattern and the flags can be set via the constructor or by calling the setPattern() member function.
The pattern syntax is a variation on Unix glob-style patterns. The most apparent differences from globbing rules are the distinction between * and **, and that character ranges should be written with curly braces instead of square brackets; that is, any-letter is expressed as {a-zA-Z} and not as [a-zA-Z], because square brackets are reserved for the notation of module vector indices.
The following option flags are supported:
- dottedpath: controls whether some wildcards (?, *) will match dots
- fullstring: controls whether to do a full string or substring match
- casesensitive: whether matching is case sensitive or case insensitive
Patterns may contain the following elements:
- question mark, ? : matches any character (except dot if dottedpath=true)
- asterisk, * : matches zero or more characters (except dots if dottedpath=true)
- double asterisk, ** : matches zero or more characters, including dots
- set, e.g. {a-zA-Z} : matches any character that is contained in the set
- negated set, e.g. {^a-z}: matches any character that is NOT contained in the set
- numeric range, e.g. {38..150} : matches any number (i.e. sequence of digits) in the given range
- numeric index range, e.g. [38..150] : matches any number in square brackets in the given range
- backslash, \ : takes away the special meaning of the subsequent character
- NOTE
The dottedpath option was introduced to make matching OMNeT++ module paths more powerful. When it is off (dottedpath=false), there is no difference between * and **; they both match any character sequence. However, when matching OMNeT++ module paths or other strings where dot is a separator character, it is useful to turn on the dottedpath mode (dottedpath=true). In that mode, *, not being able to cross a dot, can match only a single path component (or part of it), and ** can match multiple path components.
Sets and negated sets can contain several character ranges and also enumerations of characters, for example {_a-zA-Z0-9} or {xyzc-f}. To include a hyphen in the set, place it at a position where it cannot be interpreted as a character range, for example {a-z-} or {-a-z}. To include a close brace in the set, it must be the first character: {}a-z}, or for a negated set: {^}a-z}. A backslash is always taken as a literal backslash (and NOT as an escape character) within set definitions. When doing case-insensitive matches, avoid ranges that include both alpha and non-alpha characters, because they might cause funny results.
For numeric ranges and numeric index ranges, ranges are inclusive, and both the start and the end of the range are optional; that is, {10..}, {..99}, and {..} are all valid numeric ranges (the last one matches any number). Only nonnegative integers can be matched. Caveat: {17..19} will match "a17", "117", and also "963217"!
The cPatternMatcher constructor and the setPattern() member function have similar signatures:
cPatternMatcher(const char *pattern, bool dottedpath, bool fullstring,
bool casesensitive);
void setPattern(const char *pattern, bool dottedpath, bool fullstring,
bool casesensitive);
The matcher function:
bool matches(const char *text);
There are also some more utility functions for printing the pattern, determining whether a pattern contains wildcards, etc.
Example:
cPatternMatcher matcher("**.host[*]", true, true, true);
EV << matcher.matches("Net.host[0]") << endl; // -> true
EV << matcher.matches("Net.area1.host[0]") << endl; // -> true
EV << matcher.matches("Net.host") << endl; // -> false
EV << matcher.matches("Net.host[0].tcp") << endl; // -> false
7.7.2 cMatchExpression¶
The cMatchExpression class builds on top of cPatternMatcher, and lets one determine whether an object matches a given pattern expression.
A pattern expression consists of elements in the
fieldname =~ pattern syntax; they check whether the string
representation of the given field of the object matches the pattern.
- [Note that the syntax has changed in OMNeT++ version 6.0. In prior
versions, field matchers had to be written as fieldname(pattern).]
These elements can be combined with the AND, OR, NOT operators, accepted in both lowercase and uppercase. AND has higher precedence than OR, but parentheses can be used to change the evaluation order.
Pattern examples:
- "node*"
- "node* or host*"
- "packet-* and className =~ PPPFrame"
- "className =~ TCPSegment and byteLength =~ {4096..}"
- "className=~TCPSegment and (SYN or DATA-*) and not kind=~{0..2}"
The cMatchExpression class has a constructor and setPattern() method similar to those of cPatternMatcher:
cMatchExpression(const char *pattern, bool dottedpath, bool fullstring,
bool casesensitive);
void setPattern(const char *pattern, bool dottedpath, bool fullstring,
bool casesensitive);
However, the matcher function takes a cMatchExpression::Matchable instead of string:
bool matches(const Matchable *object);
This means that objects to be matched must either be subclassed from cMatchExpression::Matchable, or be wrapped into some adapter class that does. cMatchExpression::Matchable is a small abstract class with only a few pure virtual functions:
/**
* Objects to be matched must implement this interface
*/
class SIM_API Matchable
{
public:
/**
* Return the default string to match. The returned pointer will not be
* cached by the caller, so it is OK to return a pointer to a static buffer.
*/
virtual const char *getAsString() const = 0;
/**
* Return the string value of the given attribute, or nullptr if the object
* doesn't have an attribute with that name. The returned pointer will not
* be cached by the caller, so it is OK to return a pointer to a static buffer.
*/
virtual const char *getAsString(const char *attribute) const = 0;
/**
* Virtual destructor.
*/
virtual ~Matchable() {}
};
To be able to match instances of an existing class that is not already a Matchable, one needs to write an adapter class. An adapter class that we can look at as an example is cMatchableString. cMatchableString makes it possible to match strings with a cMatchExpression, and is part of OMNeT++:
/**
* Wrapper to make a string matchable with cMatchExpression.
*/
class cMatchableString : public cMatchExpression::Matchable
{
private:
std::string str;
public:
cMatchableString(const char *s) {str = s;}
virtual const char *getAsString() const {return str.c_str();}
virtual const char *getAsString(const char *name) const {return nullptr;}
};
An example:
cMatchExpression expr("foo* or bar*", true, true, true);
cMatchableString str1("this is a foo");
cMatchableString str2("something else");
EV << expr.matches(&str1) << endl; // -> true
EV << expr.matches(&str2) << endl; // -> false
Or, by using temporaries:
EV << expr.matches(&cMatchableString("this is a foo")) << endl; // -> true
EV << expr.matches(&cMatchableString("something else")) << endl; // -> false
7.8 Dynamic Expression Evaluation¶
The NED expr() operator encapsulates a formula in an object form. On the C++ side, the object is an instance of cOwnedDynamicExpression.
The expression can be evaluated using the evaluate() method that returns a cValue, or one of the typed methods: boolValue(), intValue(), doubleValue(), stringValue(), xmlValue(). But before that, a custom resolver needs to be implemented, and installed using the setResolver(). The resolver subclasses from cDynamicExpression::IResolver, and its methods readVariable(), readMember(), callFunction(), callMethod() determine how to evaluate various constructs in the expression.
7.9 Collecting Summary Statistics and Histograms¶
There are several statistics and result collection classes:
cStdDev, cHistogram, cPSquare, and
cKSplit. They are all derived from the abstract base class
cStatistic; histogram-like classes derive from
cAbstractHistogram.
- [Earlier versions of OMNeT++ had more
statistical classes: cWeightedStdDev, cLongHistogram,
cDoubleHistogram, cVarHistogram. The functionality
of these classes has been consolidated into cStdDev and
cHistogram.]
- cStdDev keeps summary statistics (mean, standard deviation, range) of weighted or unweighted observations.
- cHistogram is for collecting observations into a histogram. cHistogram is highly configurable, supports adding/removing/merging bins dynamically, and can produce a good histogram from most distributions without requiring manual configuration.
- cPSquare is a class that uses the P2 algorithm described in [JCh85]. The algorithm calculates quantiles without storing the observations; one can also think of it as a histogram with equiprobable cells.
- cKSplit is an adaptive histogram-like algorithm that performs dynamic subdivision of the bins to refine resolution at the bulk of the distribution.

All classes use the double type for representing observations, and compute all metrics in the same data type (except the observation count, which is int64_t.)
For weighted statistics, weights are also double. Being able to handle non-integer weights is important because weighted statistics are often used for computing time averages, e.g., average queue length or average channel utilization.
7.9.1 cStdDev¶
The cStdDev class is meant to collect summary statistics of observations. If you also need to compute a histogram, use cHistogram (or cKSplit/cPSquare) instead, because those classes already include the functionality of cStdDev.
cStdDev can collect unweighted or weighted statistics. This needs to be decided in the constructor call and cannot be changed later. Specify true as the second argument for weighted statistics.
cStdDev unweighted("packetDelay"); // unweighted
cStdDev weighted("queueLength", true); // weighted
Observations are added to the statistics by using the collect() or the collectWeighted() methods. The latter takes two parameters, the value and the weight.
for (double value : values)
unweighted.collect(value);
for (double value : values2) {
double weight = ...
weighted.collectWeighted(value, weight);
}
Statistics can be obtained from the object with the following methods: getCount(), getMin(), getMax(), getMean(), getStddev(), getVariance().
There are two getter methods that only work for unweighted statistics: getSum() and getSqrSum(). Plain (unweighted) sum and sum of squares are not computed for weighted observations, and it is an error to call these methods in the weighted case.
Other getter methods are primarily meant for weighted statistics: getSumWeights(), getWeightedSum(), getSqrSumWeights(), getWeightedSqrSum(). When called on unweighted statistics, these methods simply assume a weight of 1.0 for all observations.
An example:
EV << "count = " << unweighted.getCount() << endl; EV << "mean = " << unweighted.getMean() << end; EV << "stddev = " << unweighted.getStddev() << end; EV << "min = " << unweighted.getMin() << end; EV << "max = " << unweighted.getMax() << end;
7.9.2 cHistogram¶
cHistogram is able to represent both uniform and non-uniform bin histograms and supports both weighted and unweighted observations. The histogram can be modified dynamically: it can be extended with new bins, and adjacent bins can be merged. In addition to the bin values (which mean count in the unweighted case, and sum of weights in the weighted case), the histogram object also keeps the number (or sum of weights) of the lower and upper outliers (“underflows” and “overflows”).

Setting up and managing the bins based on the collected observations is usually delegated to a strategy object. However, for most use cases, histogram strategies are not something the user needs to be concerned with. The default constructor of cHistogram sets up the histogram with a default strategy that usually produces a good quality histogram without requiring manual configuration or a-priori knowledge about the distribution. For special use cases, there are other histogram strategies, and it is also possible to write new ones.
7.9.2.1 Creating a Histogram¶
cHistogram has several constructor variants. Like with cStdDev, it needs to be decided in the constructor call by a boolean argument whether the histogram should collect unweighted (false) or weighted (true) statistics; the default is unweighted. Another argument is a number of bins hint. (The actual number of bins produced might slightly differ, due to dynamic range extensions and bin merging performed by some strategies.)
cHistogram unweighted1("packetDelay"); // unweighted
cHistogram unweighted2("packetDelay", 10); // unweighted, with ~10 bins
cHistogram weighted1("queueLength", true); // weighted
cHistogram weighted2("queueLength", 10, true); // weighted, with ~10 bins
It is also possible to provide a strategy object in a constructor call. (The strategy object may also be set later though, using setStrategy(). It must be called before the first observation is collected.)
cHistogram autoRangeHist("queueLength", new cAutoRangeHistogramStrategy());
This constructor can also be used to create a histogram without a strategy object, which is useful if you want to set up the histogram bins manually.
cHistogram hist("queueLength", nullptr, true); // weighted, no strategy
cHistogram also has methods where you can provide constraints and hints for setting up the bins: setMode(), setRange(), setRangeExtensionFactor(), setAutoExtend(), setNumBinsHint(), setBinSizeHint(). These methods delegate to similar methods of cAutoRangeHistogramStrategy.
7.9.2.2 Collecting Observations¶
Observations are added to the histogram in the same way as with cStdDev: using the collect() and collectWeighted() methods.
7.9.2.3 Querying the Bins¶
Histogram bins can be accessed with three member functions: getNumBins() returns the number of bins, getBinEdge(int k) returns the kth bin edge, getBinValue(int k) returns the count or sum of weights in bin k, and getBinPDF(int k) returns the PDF value in the bin (i.e. between getBinEdge(k) and getBinEdge(k+1)). The getBinInfo(k) method returns multiple bin data (edges, value, relative frequency) packed together in a struct. Four other methods, getUnderflowSumWeights(), getOverflowSumWeights(), getNumUnderflows(), getNumOverflows(), provide access to the outliers.
These functions, being defined on cHistogramBase, are not only available on cHistogram but also for cPSquare and cKSplit.
For cHistogram, bin edges and bin values can also be accessed as a vector of doubles, using the getBinEdges() and getBinValues() methods.

An example:
EV << "[" << hist.getMin() << "," << hist.getBinEdge(0) << "): "
<< hist.getUnderflowSumWeights() << endl;
int numBins = hist.getNumBins();
for (int i = 0; i < numBins; i++) {
EV << "[" << hist.getBinEdge(i) << "," << hist.getBinEdge(i+1) << "): "
<< hist.getBinValue(i) << endl;
}
EV << "[" << hist.getBinEdge(numBins) << "," << hist.getMax() << "]: "
<< hist.getOverflowSumWeights() << endl;
The getPDF(x) and getCDF(x) member functions return the value of the Probability Density Function and the Cumulative Density Function at a given x, respectively.
Note that bins may not be immediately available during observation collection, because some histogram strategies use precollection to gather information about the distribution before setting up the bins. Use binsAlreadySetUp() to figure out whether bins are set up already. Setting up the bins can be forced with the setupBins() method.
7.9.2.4 Setting Up and Managing the Bins¶
The cHistogram class has several methods for creating and manipulating bins. These methods are primarily intended to be called from strategy classes, but are also useful if you want to manage the bins manually, i.e., without a strategy class.
For setting up the bins, you can either use createUniformBins() with the range (lo, hi) and the step size as parameters, or specify all bin edges explicitly in a vector of doubles to setBinEdges().
When the bins have already been set up, the histogram can be extended with new bins down or up using the prependBins() and appendBins() methods that take a list of new bin edges to add. There is also an extendBinsTo() method that extends the histogram with equal-sized bins at either end to make sure that a supplied value falls into the histogram range. Of course, extending the histogram is only possible if there are no outliers in that direction. (The positions of the outliers are not preserved, so it is not known how many would fall in each of the newly created bins.)
If the histogram has too many bins, adjacent ones (pairs, triplets, or groups of size n) can be merged, using the mergeBins() method.
Example code which sets up a histogram with uniform bins:
cHistogram hist("queueLength", nullptr); // create w/o strategy object
hist.createUniformBins(0, 100, 10); // 10 bins over (0,100)
The following code achieves the same, but uses setBinEdges():
std::vector<double> edges = {0,10,20,30,40,50,60,70,80,90,100}; // C++11
cHistogram hist("queueLength", nullptr);
hist.setBinEdges(edges);
7.9.2.5 Strategy Concept¶
Histogram strategies subclass from cIHistogramStrategy, and are responsible for setting up and managing the bins.
A cHistogram is created with a cDefaultHistogramStrategy by default, which works well in most cases. Other cHistogram constructors allow passing in an arbitrary histogram strategy.
The collect() and collectWeighted() methods of a cHistogram delegate to similar methods of the strategy object, which in turn decide when and how to set up the bins, and how to manage the bins later. (Setting up the bins may be postponed until a few observations have been collected, to gather more information for it.) The histogram strategy uses public histogram methods like createUniformBins() to create and manage the bins.
7.9.2.6 Available Histogram Strategies¶
The following histogram strategy classes exist:
cFixedRangeHistogramStrategy sets up uniform bins over a predetermined interval. The number of bins and the histogram mode (integers or reals) also need to be configured. This strategy does not use precollection, as all input for setting up the bins must be explicitly provided by the user.
cDefaultHistogramStrategy is used by the default setup of cHistogram. This strategy uses precollection to gather input information about the distribution before setting up the bins. Precollection is used to determine the initial histogram range and the histogram mode (integers vs. reals). In integers mode, bin edges will be whole numbers.
To keep up with distributions that change over time, this histogram strategy can auto-extend the histogram range by adding new bins as needed. It also performs bin merging when necessary, to keep the number of bins reasonably low.
cAutoRangeHistogramStrategy is a generic, very configurable, precollection-based histogram strategy that creates uniform bins and creates quality histograms for practical distributions.
Several constraints and hints can be specified for setting up the bins: range lower and/or upper endpoint, bin size, number of bins, mode (integers vs. reals), and whether bin size rounding is to be used.
This histogram strategy can auto-extend the histogram range by adding new bins at either end. One can also set up an upper limit on the number of histogram bins to prevent it from growing indefinitely. Bin merging can also be enabled: it will cause every two (or N) adjacent bins to be merged to reduce the number of bins if their number grows too high.
7.9.2.7 Random Number Generation from Distributions¶
The draw() member function generates random numbers from the distribution stored by the object:
double rnd = histogram.draw();
7.9.2.8 Storing and Loading Distributions¶
The statistic classes have loadFromFile() member functions that read the histogram data from a text file. If you need a custom distribution that cannot be written (or it is inefficient) as a C++ function, you can describe it in histogram form stored in a text file, and use a histogram object with loadFromFile().
You can also use saveToFile() that writes out the distribution collected by the histogram object:
FILE *f = fopen("histogram.dat","w");
histogram.saveToFile(f); // save the distribution
fclose(f);
cHistogram restored;
FILE *f2 = fopen("histogram.dat","r");
restored.loadFromFile(f2); // load stored distribution
fclose(f2);
7.9.3 cPSquare¶
The cPSquare class implements the P2 algorithm described in [JCh85]. P2 is a heuristic algorithm for the dynamic calculation of the median and other quantiles. The estimates are produced dynamically as the observations arrive. The observations are not stored; therefore, the algorithm has a very small and fixed storage requirement regardless of the number of observations. The P2 algorithm operates by adaptively shifting bin edges as observations arrive.
cPSquare only needs the number of cells, for example, in the constructor:
cPSquare psquare("endToEndDelay", 20);
Afterward, observations can be added and the resulting histogram can be queried with the same cAbstractHistogram methods as with cHistogram.
7.9.4 cKSplit¶
7.9.4.1 Motivation¶
The k-split algorithm is an on-line distribution estimation method. It was designed for on-line result collection in simulation programs. The method was proposed by Varga and Fakhamzadeh in 1997. The primary advantage of k-split is that without having to store the observations, it gives a good estimate without requiring a-priori information about the distribution, including the sample size. The k-split algorithm can be extended to multi-dimensional distributions, but here we deal with the one-dimensional version only.
7.9.4.2 The k-split Algorithm¶
The k-split algorithm is an adaptive histogram-type estimate which maintains a good partitioning by doing cell splits. We start out with a histogram range [xlo, xhi) with k equal-sized histogram cells with observation counts n1,n2, .. nk. Each collected observation increments the corresponding observation count. When an observation count ni reaches a split threshold, the cell is split into k smaller, equal-sized cells with observation counts ni,1, ni,2, .. ni,k initialized to zero. The ni observation count is remembered and is called the mother observation count to the newly created cells. Further observations may cause cells to be split further (e.g. ni,1,1,...ni,1,k etc.), thus creating a k-order tree of observation counts where leaves contain live counters that are actually incremented by new observations, and intermediate nodes contain mother observation counts for their children. If an observation falls outside the histogram range, the range is extended in a natural manner by inserting new level(s) at the top of the tree. The fundamental parameter to the algorithm is the split factor k. Experience has shown that k=2 works best.

For density estimation, the total number of observations that fell into each cell of the partition has to be determined. For this purpose, mother observations in each internal node of the tree must be distributed among its child cells and propagated up to the leaves.
Let n...,i be the (mother) observation count for a cell, s...,i be the total observation count in a cell n...,i plus the observation counts in all its sub-, sub-sub-, etc. cells), and m...,i the mother observations propagated to the cell. We are interested in the ñ...,i = n...,i + m...,i estimated amount of observations in the tree nodes, especially in the leaves. In other words, if we have ñ...,i estimated observation amount in a cell, how to divide it to obtain m...,i,1, m...,i,2 .. m...,i,k that can be propagated to child cells. Naturally, m...,i,1 + m...,i,2 + .. + m...,i,k = ñ...,i.
Two natural distribution methods are even distribution (when m...,i,1 = m...,i,2 = .. = m...,i,k) and proportional distribution (when m...,i,1 : m...,i,2 : .. : m...,i,k = s...,i,1 : s...,i,2 : .. : s...,i,k). Even distribution is optimal when the s...,i,j values are very small, and proportional distribution is good when the s...,i,j values are large compared to m...,i,j. In practice, a linear combination of them seems appropriate, where λ=0 means even and λ=1 means proportional distribution:
m..,i,j = (1-λ)ñ..,i/k + λ ñ..,i s...,i,j / s..,i where λ is in [0,1]

Note that while n...,i are integers, m...,i and thus
ñ...,i are typically real numbers. The histogram estimate
calculated from k-split is not exact, because the frequency
counts calculated in the above manner contain a degree of estimation
themselves. This introduces a certain cell division error;
the λ parameter should be selected so that it minimizes that
error. It has been shown that the cell division error can
be reduced to a more-than-acceptable small value.
Strictly speaking, the k-split algorithm is semi-online,
because its needs some observations to set up the initial histogram
range. Because of the range extension and cell split
capabilities, the algorithm is not very sensitive to the choice of the
initial range, so very few observations are sufficient for range
estimation (say Npre=10). Thus we can regard k-split as
an on-line method.
K-split can also be used in semi-online mode, when the algorithm is only used to create an optimal partition from a larger number of Npre observations. When the partition has been created, the observation counts are cleared and the Npre observations are fed into k-split once again. This way all mother (non-leaf) observation counts will be zero and the cell division error is eliminated. It has been shown that the partition created by k-split can be better than both the equi-distant and the equal-frequency partition.
OMNeT++ contains an implementation of the k-split algorithm, the cKSplit class.
7.9.4.3 The cKSplit Class¶
The cKSplit class is an implementation of the k-split method. It is a subclass of cAbstractHistogram, so configuring, adding observations and querying histogram cells is done the same way as with other histogram classes.
Specific member functions allow one to fine-tune the k-split algorithm. setCritFunc() and setDivFunc() let one replace the split criteria and the cell division function, respectively. setRangeExtension() lets one enable/disable range extension. (If range extension is disabled, out-of-range observations will simply be counted as underflows or overflows.)
The class also allows one to access the k-split data structure, directly, via methods like getTreeDepth(), getRootGrid(), getGrid(i), and others.
7.10 Recording Simulation Results¶
7.10.1 Output Vectors: cOutVector¶
Objects of type cOutVector are responsible for writing time series data (referred to as output vectors) to a file. The record() method is used to output a value (or a value pair) with a timestamp. The object's name will serve as the name of the output vector.
The vector name can be passed in the constructor,
cOutVector responseTimeVec("response time");
but in the usual arrangement, you'd make the cOutVector a member of the module class and set the name in initialize(). You'd record values from handleMessage() or from a function called from handleMessage().
The following example is a Sink module that records the lifetime of every message that arrives at it.
class Sink : public cSimpleModule
{
protected:
cOutVector endToEndDelayVec;
virtual void initialize();
virtual void handleMessage(cMessage *msg);
};
Define_Module(Sink);
void Sink::initialize()
{
endToEndDelayVec.setName("End-to-End Delay");
}
void Sink::handleMessage(cMessage *msg)
{
simtime_t eed = simTime() - msg->getCreationTime();
endToEndDelayVec.record(eed);
delete msg;
}
There is also a recordWithTimestamp() method to make it possible to record values into output vectors with a timestamp other than simTime(). Increasing timestamp order is still enforced though.
All cOutVector objects write to a single output vector file
that has a file extension .vec.
- [A .vci file is also created, but it is just an index for
the .vec file and does not contain any new information. The IDE
re-creates the .vci file if it gets lost.]
You can configure output vectors from omnetpp.ini: you can disable individual vectors or limit recording to certain simulation time intervals (see sections [12.2.2], [12.2.5]).
If the output vector object is disabled or the simulation time is outside the specified interval, record() doesn't write anything to the output file. However, if you have a Qtenv inspector window open for the output vector object, the values will be displayed there, regardless of the state of the output vector object.
7.10.2 Output Scalars¶
While output vectors are used to record time series data and thus they typically record a large volume of data during a simulation run, output scalars are supposed to record a single value per simulation run. You can use output scalars
- to record summary data at the end of the simulation run
- to perform several runs with different parameter settings/random seeds and determine the dependence of some measures on the parameter settings. For example, multiple runs and output scalars are the way to produce Throughput vs. Offered Load plots.
Output scalars are recorded with the record() method of cSimpleModule, and you will usually want to insert this code into the finish() function. An example:
void Transmitter::finish()
{
double avgThroughput = totalBits / simTime();
recordScalar("Average throughput", avgThroughput);
}
You can record whole statistic objects by calling their record() methods, declared as part of cStatistic. In the following example, we create a Sink module that calculates the mean, standard deviation, minimum, and maximum values of a variable, and records them at the end of the simulation.
class Sink : public cSimpleModule
{
protected:
cStdDev eedStats;
virtual void initialize();
virtual void handleMessage(cMessage *msg);
virtual void finish();
};
Define_Module(Sink);
void Sink::initialize()
{
eedStats.setName("End-to-End Delay");
}
void Sink::handleMessage(cMessage *msg)
{
simtime_t eed = simTime() - msg->getCreationTime();
eedStats.collect(eed);
delete msg;
}
void Sink::finish()
{
recordScalar("Simulation duration", simTime());
eedStats.record();
}
The above calls record the data into an output scalar file, a line-oriented text file that has the file extension .sca. The format and processing of output vector files are described in chapter .
7.11 Watches and Snapshots¶
7.11.1 Basic Watches¶
Unfortunately, variables of type int, long, double do not show up by default in Qtenv; neither do STL classes (std::string, std::vector, etc.) or your own structs and classes. This is because the simulation kernel, being a library, knows nothing about types and variables in your source code.
OMNeT++ provides WATCH() and a set of other macros to allow variables to be inspectable in Qtenv and to be output into the snapshot file. WATCH() macros are usually placed into initialize() (to watch instance variables) or at the top of the activity() function (to watch its local variables); the point being that they should only be executed once.
long packetsSent; double idleTime; WATCH(packetsSent); WATCH(idleTime);
Of course, members of classes and structs can also be watched:
WATCH(config.maxRetries);
The Qtenv runtime environment lets you inspect and also change the values of inspected variables.
The WATCH() macro can be used with any type that has a stream output operator (operator<<) defined. By default, this includes all primitive types and std::string, but since you can write operator<< for your classes/structs and basically any type, WATCH() can be used with anything. The only limitation is that since the output should more or less fit on a single line, the amount of information that can be conveniently displayed is limited.
An example stream output operator:
std::ostream& operator<<(std::ostream& os, const ClientInfo& cli)
{
os << "addr=" << cli.clientAddr << " port=" << cli.clientPort; // no endl!
return os;
}
And the WATCH() line:
WATCH(currentClientInfo);
7.11.2 Read-write Watches¶
Watches for primitive types and std::string allow for changing the value from the GUI as well, but for other types, you need to explicitly add support for that. What you need to do is define a stream input operator (operator>>) and use the WATCH_RW() macro instead of WATCH().
The stream input operator:
std::ostream& operator>>(std::istream& is, ClientInfo& cli)
{
// read a line from "is" and parse its contents into "cli"
return is;
}
And the WATCH_RW() line:
WATCH_RW(currentClientInfo);
7.11.3 Structured Watches¶
WATCH() and WATCH_RW() are basic watches; they allow one line of (unstructured) text to be displayed. However, if you have a data structure generated from message definitions (see Chapter [5]), then there is a better approach. The message compiler automatically generates meta-information describing individual fields of the class or struct, which makes it possible to display the contents on the field level.
The WATCH macros to be used for this purpose are WATCH_OBJ() and WATCH_PTR(). Both expect the object to be subclassed from cObject; WATCH_OBJ() expects a reference to such a class, and WATCH_PTR() expects a pointer variable.
ExtensionHeader hdr; ExtensionHeader *hdrPtr; ... WATCH_OBJ(hdr); WATCH_PTR(hdrPtr);
CAUTION: With WATCH_PTR(), the pointer variable must point to a valid object or be nullptr at all times, otherwise the GUI may crash while trying to display the object. This practically means that the pointer should be initialized to nullptr even if not used, and should be set to nullptr when the object to which it points is deleted.
delete watchedPtr; watchedPtr = nullptr; // set to nullptr when object gets deleted
7.11.4 STL Watches¶
The standard C++ container classes (vector, map, set, etc.) also have structured watches, available via the following macros:
WATCH_VECTOR(), WATCH_PTRVECTOR(), WATCH_LIST(), WATCH_PTRLIST(), WATCH_SET(), WATCH_PTRSET(), WATCH_MAP(), WATCH_PTRMAP().
The PTR-less versions expect the data items ("T") to have stream output operators (operator <<), because that is how they will display them. The PTR versions assume that data items are pointers to some type that has operator <<. WATCH_PTRMAP() assumes that only the value type (“second”) is a pointer, the key type (“first”) is not. (If you happen to use pointers as keys, then define operator << for the pointer type itself.)
Examples:
std::vector<int> intvec; WATCH_VECTOR(intvec); std::map<std::string,Command*> commandMap; WATCH_PTRMAP(commandMap);
7.11.5 Watching Expressions¶
The WATCH_EXPR() macro makes the result of a formula or calculation inspectable in Qtenv without requiring a separate variable. The expression is evaluated as often as needed, providing real-time monitoring of derived metrics. Unlike other WATCH macros that monitor single variables, WATCH_EXPR() can display the result of operations combining multiple variables, function calls, or any valid expression.
Example:
WATCH_EXPR("totalPks", numTransmitted + queue.length() + numDropped);
WATCH_EXPR() operates by internally wrapping the expression into a lambda function. Class members will be captured by reference (via the this pointer). In contrast, local variables will be captured by value, that is, their current values will be used in all subsequent evaluations. If this is not what you need, there also is a WATCH_LAMBDA() macro that explicitly takes a lambda function, giving you more control over the way variables are captured. WATCH_LAMBDA() also allows for supplying a multi-statement function body instead of a single expression.
Example:
WATCH_LAMBDA("totalPks", [this]() {
return numTransmitted + queue.length() + numDropped;
});
7.11.6 Snapshots¶
The snapshot() function outputs textual information about all or selected objects of the simulation (including the objects created in module functions by the user) into the snapshot file.
bool snapshot(cObject *obj=nullptr, const char *label=nullptr);
The function can be called from module functions, like this:
snapshot(); // dump the network snapshot(this); // dump this simple module and all its objects snapshot(getSimulation()->getFES()); // dump the future events set
snapshot() will append to the end of the snapshot file. The snapshot file name has an extension of .sna.
The snapshot file output is detailed enough to be used for debugging the simulation: by regularly calling snapshot(), one can trace how the values of variables and objects changed over the simulation. The arguments: label is a string that will appear in the output file; obj is the object whose inside is of interest. By default, the whole simulation (all modules, etc.) will be written out.
If you run the simulation with Qtenv, you can also create a snapshot from the menu.
An example snapshot file (some abbreviations have been applied):
<?xml version="1.0" encoding="ISO-8859-1"?>
<snapshot object="simulation" label="Long queue" simtime="9.038229311343"
network="FifoNet">
<object class="cSimulation" fullpath="simulation">
<info></info>
<object class="cModule" fullpath="FifoNet">
<info>id=1</info>
<object class="fifo::Source" fullpath="FifoNet.gen">
<info>id=2</info>
<object class="cPar" fullpath="FifoNet.gen.sendIaTime">
<info>exponential(0.01s)</info>
</object>
<object class="cGate" fullpath="FifoNet.gen.out">
<info>--> fifo.in</info>
</object>
</object>
<object class="fifo::Fifo" fullpath="FifoNet.fifo">
<info>id=3</info>
<object class="cPar" fullpath="FifoNet.fifo.serviceTime">
<info>0.01</info>
</object>
<object class="cGate" fullpath="FifoNet.fifo.in">
<info><-- gen.out</info>
</object>
<object class="cGate" fullpath="FifoNet.fifo.out">
<info>--> sink.in</info>
</object>
<object class="cQueue" fullpath="FifoNet.fifo.queue">
<info>length=13</info>
<object class="cMessage" fullpath="FifoNet.fifo.queue.job">
<info>src=FifoNet.gen (id=2) dest=FifoNet.fifo (id=3)</info>
</object>
<object class="cMessage" fullpath="FifoNet.fifo.queue.job">
<info>src=FifoNet.gen (id=2) dest=FifoNet.fifo (id=3)</info>
</object>
</object>
<object class="fifo::Sink" fullpath="FifoNet.sink">
<info>id=4</info>
<object class="cGate" fullpath="FifoNet.sink.in">
<info><-- fifo.out</info>
</object>
</object>
</object>
<object class="cEventHeap" fullpath="simulation.scheduled-events">
<info>length=3</info>
<object class="cMessage" fullpath="simulation.scheduled-events.job">
<info>src=FifoNet.fifo (id=3) dest=FifoNet.sink (id=4)</info>
</object>
<object class="cMessage" fullpath="...sendMessageEvent">
<info>at T=9.0464.., in dt=0.00817..; selfmsg for FifoNet.gen (id=2)</info>
</object>
<object class="cMessage" fullpath="...end-service">
<info>at T=9.0482.., in dt=0.01; selfmsg for FifoNet.fifo (id=3)</info>
</object>
</object>
</object>
</snapshot>
7.11.7 Getting Coroutine Stack Usage¶
It is important to choose the correct stack size for modules. If the stack is too large, it unnecessarily consumes memory; if it is too small, a stack violation occurs.
OMNeT++ contains a mechanism that detects stack overflows. It checks the intactness of a predefined byte pattern (0xdeadbeef) at the stack boundary, and reports a “stack violation” if it was overwritten. The mechanism usually works fine, but occasionally it can be fooled by large -- and not fully used -- local variables (e.g. char buffer[256]): if the byte pattern happens to fall in the middle of such a local variable, it may be preserved intact and OMNeT++ does not detect the stack violation.
To be able to make a good guess about stack size, you can use the getStackUsage() call, which tells you how much stack the module actually uses. It is most conveniently called from finish():
void FooModule::finish()
{
EV << getStackUsage() << " bytes of stack used\n";
}
The value includes the extra stack added by the user interface library
(see extraStackforEnvir in
envir/envirbase.h), which is currently 8K for Cmdenv and at least 80K
for Qtenv.
- [The actual value is platform-dependent.]
getStackUsage() also works by checking the existence of predefined byte patterns in the stack area, so it is also subject to the above effect with local variables.
7.12 Defining New NED Functions¶
It is possible to extend the NED language with new functions beyond the built-in ones. New functions are implemented in C++, and then compiled into the simulation model. When a simulation program starts up, the new functions are registered in the NED runtime and become available for use in NED and ini files.
There are two methods to define NED functions. The
Define_NED_Function() macro is the more flexible, preferred method
of the two. Define_NED_Math_Function() is the older one, and it
supports only certain cases. Both macros have several variants.
- [Before OMNeT++ 4.2, Define_NED_Math_Function() was
called Define_Function().]
7.12.1 Define_NED_Function()¶
The Define_NED_Function() macro lets you define new functions that can accept arguments of various data types (bool, double, string, etc.), support optional arguments and also variable argument lists (variadic functions).
The macro has two variants:
Define_NED_Function(FUNCTION,SIGNATURE); Define_NED_Function2(FUNCTION,SIGNATURE,CATEGORY,DESCRIPTION);
The two variants are basically equivalent; the only difference is that the second one allows you to specify two more parameters, CATEGORY and DESCRIPTION. These two parameters expect human-readable strings that are displayed when listing the available NED functions.
The common parameters, FUNCTION and SIGNATURE are the important ones. FUNCTION is the name of (or pointer to) the C++ function that implements the NED function, and SIGNATURE is the function signature as a string; it defines the name, argument types and return type of the NED function.
You can list the available NED functions by running opp_run or any simulation executable with the -h nedfunctions option. The result will be similar to what you can see in Appendix [22].
$ opp_run -h nedfunctions
OMNeT++ Discrete Event Simulation...
Functions that can be used in NED expressions and in omnetpp.ini:
Category "conversion":
double : double double(any x)
Converts x to double, and returns the result. A boolean argument becomes
0 or 1; a string is interpreted as a number; an XML argument causes an error.
...
Seeing the above output, it should now be obvious what the CATEGORY and DESCRIPTION macro arguments are for. OMNeT++ uses the following category names: "conversion", "math", "misc", "ned", "random/continuous", "random/discrete", "strings", "units", "xml". You can use these category names for your own functions as well, when appropriate.
7.12.1.1 The Signature¶
The signature string has the following syntax:
returntype functionname(argtype1 argname1, argtype2 argname2, ...)
The functionname part defines the name of the NED function, and it must meet the syntactical requirements for NED identifiers (start with a letter or underscore, not be a reserved NED keyword, etc.)
The argument types and return type can be one of the following: bool, int (maps to C/C++ long), double, quantity, string, xml or any; that is, any NED parameter type plus quantity and any. quantity means double with an optional measurement unit (double and int only accept dimensionless numbers), and any stands for any type. The argument names are presently ignored.
To make arguments optional, append a question mark to the argument name. Like in C++, optional arguments may only occur at the end of the argument list, i.e. all arguments after an optional argument must also be optional. The signature string does not have syntax for supplying default values for optional arguments; that is, default values have to be built into the C++ code that implements the NED function. To let the NED function accept any number of additional arguments of arbitrary types, add an ellipsis (...) to the signature as the last argument.
Some examples:
"int factorial(int n)" "bool isprime(int n)" "double sin(double x)" "string repeat(string what, int times)" "quantity uniform(quantity a, quantity b, long rng?)" "any choose(int index, ...)"
The first three examples define NED functions with the names factorial, isprime and sin, with the obvious meanings. The fourth example can be the signature for a function that repeats a string n times and returns the concatenated result. The fifth example is the signature of the existing uniform() NED function; it accepts numbers both with and without measurement units (of course, when invoked with measurement units, both a and b must have one, and the two must be compatible -- this should be checked by the C++ implementation). uniform() also accepts an optional third argument, an RNG index. The sixth example can be the signature of a choose() NED function that accepts an integer plus any number of additional arguments of any type and returns the indexth one among them.
7.12.1.2 Implementing the NED Function¶
The C++ function that implements the NED function must have one of the following signatures, as defined by the NedFunction and NedFunctionExt typedefs:
cValue function(cComponent *context, cValue argv[], int argc); cValue function(cExpression::Context *context, cValue argv[], int argc);
As you can see, the function accepts an array of cValue objects and returns a cValue; the argc-argv style argument list should be familiar to you from the declaration of the C/C++ main() function. cValue is a class that is used during the evaluation of NED expressions and represents a value together with its type. The context argument contains the module or channel in the context of which the NED expression is being evaluated; it is useful for implementing NED functions like getParentModuleIndex().
The function implementation does not need to worry too much about checking the number and types of the incoming arguments, because the NED expression evaluator already does that: inside the function you can be sure that the number and types of arguments correspond to the function signature string. Thus, argc is mostly useful only if you have optional arguments or a variable argument list. The NED expression evaluator also checks that the value you return from the function corresponds to the signature.
cValue can store all the needed data types (bool, double, string, etc.), and is equipped with the functions necessary to conveniently read and manipulate the stored value. The value can be read via functions like boolValue(), intValue(), doubleValue(), stringValue() (returns const char *), stdstringValue() (returns const std::string&) and xmlValue() (returns cXMLElement*), or by simply casting the object to the desired data type, making use of the provided typecast operators. Invoking a getter or typecast operator that does not match the stored data type will result in a runtime error. For setting the stored value, cValue provides a number of overloaded set() functions, assignment operators and constructors.
Further cValue member functions provide access to the stored data type; yet other functions are associated with handling quantities, i.e. doubles with measurement units. There are member functions for getting and setting the number part and the measurement unit part separately; for setting the two components together; and for performing unit conversion.
Equipped with the above information, we can already write a simple NED function that returns the length of a string:
static cValue ned_strlen(cComponent *context, cValue argv[], int argc)
{
return (long)argv[0].stdstringValue().size();
}
Define_NED_Function(ned_strlen, "int length(string s)");
Note that since Define_NED_Function() expects the C++ function to be already declared, we place the function implementation in front of the Define_NED_Function() line. We also declare the function to be static, because its name doesn't need to be visible to the linker. In the function body, we use std::string's size() method to obtain the length of the string, and cast the result to long; the C++ compiler will convert that into a cValue using cValue's long constructor. Note that the int keyword in the signature maps to the C++ type long.
The following example defines a choose() NED function that returns its kth argument that follows the index (k) argument.
static cValue ned_choose(cComponent *context, cValue argv[], int argc)
{
int index = (int)argv[0];
if (index < 0 || index >= argc-1)
throw cRuntimeError("choose(): index %d is out of range", index);
return argv[index+1];
}
Define_NED_Function(ned_choose, "any choose(int index, ...)");
Here, the value of argv[0] is read using the typecast operator that maps to intValue(). (Note that if the value of the index argument does not fit into an int, the conversion will result in data loss!) The code also shows how to report errors (by throwing a cRuntimeError.)
The third example shows how the built-in uniform() NED function could be reimplemented by the user:
static cValue ned_uniform(cComponent *context, cValue argv[], int argc)
{
int rng = argc==3 ? (int)argv[2] : 0;
double argv1converted = argv[1].doubleValueInUnit(argv[0].getUnit());
double result = uniform((double)argv[0], argv1converted, rng);
return cValue(result, argv[0].getUnit());
// or: argv[0].setPreservingUnit(result); return argv[0];
}
Define_NED_Function(ned_uniform, "quantity uniform(quantity a, quantity b, int rng?)");
The first line of the function body shows how to supply default values for optional arguments; for the rng argument in this case. The next line deals with unit conversion. This is necessary because the a and b arguments are both quantities and may come in with different measurement units. We use the doubleValueInUnit() function to obtain the numeric value of b in a's measurement unit. If the two units are incompatible or only one of the parameters has a unit, an error will be raised. If neither parameter has a unit, doubleValueInUnit() simply returns the stored double. Then we call the uniform() C++ function to generate a random number, and return it in a temporary object with a's measurement unit. Alternatively, we could have overwritten the numeric part of a with the result using setPreservingUnit(), and returned just that. If there is no measurement unit, getUnit() will return nullptr, which is understood by both doubleValueInUnit() and the cValue constructor.
- NOTE
Note that it is OK to change the elements of the argv[] vector: they will be discarded (popped off the evaluation stack) by the NED expression evaluator anyway when your function returns.
7.12.1.3 cValue In More Detail¶
In the previous section, we have given an overview and demonstrated the basic use of the cValue class; here we go into further details.
The stored data type can be obtained with the getType() function. It returns an enum (cValue::Type) that has the following values: UNDEF, BOOL, INT, DOUBLE, STRING, XML. UNDEF is synonymous with unset; the others correspond to data types: bool, int64_t, double, const char * (std::string), cXMLElement. There is no separate QUANTITY type: quantities are also represented with the DOUBLE type, which has an optional associated measurement unit.
The getTypeName() static function returns the string equivalent of a cValue::Type. The utility function isSet() returns true if the type is different from UNDEF; isNumeric() returns true if the type is INT or DOUBLE.
cValue value = 5.0; cValue::Type type = value.getType(); // ==> DOUBLE EV << cValue::getTypeName(type) << endl; // ==> "double"
We have already seen that the DOUBLE type serves both the double and quantity types of the NED function signature, by storing an optional measurement unit (a string) in addition to the double variable. A cValue can be set to a quantity by creating it with a two-argument constructor that accepts a double and a const char * for unit, or by invoking a similar two-argument set() function. The measurement unit can be read with getUnit(), and overwritten with setUnit(). If you assign a double to a cValue or invoke the one-argument set(double) method on it, that will clear the measurement unit. If you want to overwrite the number part but preserve the original unit, you need to use the setPreservingUnit(double) method.
There are several functions that perform unit conversion. The doubleValueInUnit() method accepts a measurement unit, and attempts to return the number in that unit. The convertTo() method also accepts a measurement unit, and tries to permanently convert the value to that unit; that is, if successful, it changes both the number and the measurement unit part of the object. The convertUnit() static cValue member function accepts three arguments: a quantity as a double and a unit, and a target unit; and returns the number in the target unit. A parseQuantity() static member function parses a string that contains a quantity (e.g. "5min 48s"), and returns both the numeric value and the measurement unit. Another version of parseQuantity() tries to return the value in a unit you specify. All functions raise an error if the unit conversion is not possible, e.g. due to incompatible units.
For performance reasons, setUnit(), convertTo() and all other functions that accept and store a measurement unit will only store the const char* pointer, but do not copy the string itself. Consequently, the passed measurement unit pointers must stay valid for at least the lifetime of the cValue object, or even longer if the same pointer propagates to other cValue objects. It is recommended that you only pass pointers that stay valid during the entire simulation. It is safe to use: (1) string constants from the code; (2) unit strings from other cValues; and (3) pooled strings, e.g., from a cStringPool or from cValue's static getPooled() function.
Example code:
// manipulating the number and the measurement unit
cValue value(250,"ms"); // initialize to 250ms
value = 300.0; // ==> 300 (clears the unit!)
value.set(500,"ms"); // ==> 500ms
value.setUnit("s"); // ==> 500s (overwrites the unit)
value.setPreservingUnit(180); // ==> 180s (overwrites the number)
value.setUnit(nullptr); // ==> 180 (clears the unit)
// unit conversion
value.set(500, "ms"); // ==> 500ms
value.convertTo("s"); // ==> 0.5s
double us = value.doubleValueInUnit("us"); // ==> 500000 (value is unchanged)
double bps = cValue::convertUnit(128, "kbps", "bps"); // ==> 128000
double ms = cValue::convertUnit("2min 15.1s", "ms"); // ==> 135100
// getting persistent measurement unit strings
const char *unit = argv[0].stringValue(); // cannot be trusted to persist
value.setUnit(cValue::getPooled(unit)); // use a persistent copy for setUnit()
7.12.2 Define_NED_Math_Function()¶
The Define_NED_Math_Function() macro lets you register a C/C++ “mathematical” function as a NED function. The registered C/C++ function may take up to four double arguments, and must return a double; the NED signature will be the same. In other words, functions registered this way cannot accept any NED data type other than double; cannot return anything else than double; cannot accept or return values with measurement units; cannot have optional arguments or variable argument lists; and are restricted to four arguments at most. In exchange for these restrictions, the C++ implementation of the functions is a lot simpler.
Accepted function signatures for Define_NED_Math_Function():
double f(); double f(double); double f(double, double); double f(double, double, double); double f(double, double, double, double);
The simulation kernel uses Define_NED_Math_Function() to expose commonly used <math.h> functions in the NED language. Most <math.h> functions (sin(), cos(), fabs(), fmod(), etc.) can be directly registered without any need for wrapper code, because their signatures is already one of the accepted ones listed above.
The macro has the following variants:
Define_NED_Math_Function(NAME,ARGCOUNT); Define_NED_Math_Function2(NAME,FUNCTION,ARGCOUNT); Define_NED_Math_Function3(NAME,ARGCOUNT,CATEGORY,DESCRIPTION); Define_NED_Math_Function4(NAME,FUNCTION,ARGCOUNT,CATEGORY,DESCRIPTION);
All macros accept the NAME and ARGCOUNT parameters; they are the intended name of the NED function and the number of double arguments the function takes (0..3). NAME should be provided without quotation marks (they will be added inside the macro.) Two macros also accept a FUNCTION parameter, which is the name of (or pointer to) the implementation C/C++ function. The macros that don't have a FUNCTION parameter simply use the NAME parameter for that as well. The last two macros accept CATEGORY and DESCRIPTION, which have exactly the same role as with Define_NED_Function().
Examples:
Define_NED_Math_Function3(sin, 1, "math", "Trigonometric function; see <math.h>"); Define_NED_Math_Function3(cos, 1, "math", "Trigonometric function; see <math.h>"); Define_NED_Math_Function3(pow, 2, "math", "Power-of function; see <math.h>");
7.13 Deriving New Classes¶
7.13.1 cObject or Not?¶
If you plan to implement a completely new class (as opposed to subclassing something already present in OMNeT++), you have to ask yourself whether you want the new class to be based on cObject or not. Note that we are not saying you should always subclass from cObject. Both solutions have advantages and disadvantages, which you have to consider individually for each class.
cObject already carries (or provides a framework for)
significant functionality that is either relevant to
your particular purpose or not. Subclassing cObject
generally means you have more code to write (as you have to
redefine certain virtual functions and adhere to conventions)
and your class will be a bit more heavy-weight.
However, if you need to store your objects in OMNeT++ objects like cQueue
or you want to store OMNeT++ classes in your object,
then you must subclass cObject.
- [For simplicity, in these sections “OMNeT++ object”
should be understood as “object of a class subclassed from
cObject”]
The most significant features of cObject are the name string (which has to be stored somewhere, so it has its overhead) and ownership management (see section [7.14]), which also provides advantages at some cost.
As a general rule, small struct-like classes like IPAddress or MACAddress are better not subclassed from cObject. If your class has at least one virtual member function, consider subclassing from cObject, which does not impose any extra cost because it doesn't have data members at all, only virtual functions.
7.13.2 cObject Virtual Methods¶
Most classes in the simulation class library are descendants of cObject. When deriving a new class from cObject or a cObject descendant, one must redefine certain member functions so that objects of the new class can fully cooperate with the simulation library classes. A list of those methods is presented below.
- NOTE
You don't need to worry about the length of the list: most functions are not always required to implement. For example, forEachChild() is only important if the new class is a container.
The following methods must be implemented:
- Constructor. At least two constructors should be provided: one that takes the object name string as const char * (recommended by convention), and another one with no arguments (must be present). The two are usually implemented as a single method, with nullptr as the default name string.
- Copy constructor, which must have the following signature for a class X: X(const X&).
- Destructor.
- Duplication function, X *dup() const. It should create and return an exact duplicate of the object. It is usually a one-line function that delegates to the copy constructor.
- Assignment operator, that is, X& operator=(const X&) for a class X. It should copy the contents of the other object into this one, except the name string. See later what to do if the object contains pointers to other objects.
If the new class contains other objects subclassed from cObject, either via pointers or as a data member, the following function should be implemented:
- Iteration function, void forEachChild(cVisitor *v). The implementation should call the function passed for each object it contains via pointer or as a data member; see the API Reference on cObject on how to implement forEachChild(). forEachChild() makes it possible for Qtenv to display the object tree, to perform searches on it, etc. It is also used by snapshot() and some other library functions.
Implementation of the following methods is recommended:
- Object info, str(). The str() function
should return a one-line string describing the object's contents or state.
The text returned by str() is displayed in several places in Qtenv.
- [Until OMNeT++ version 5.1, str() was called info().
There was also a detailedInfo() method that was removed in the
same version for lack of real usefulness.]
- Serialization, parsimPack() and parsimUnpack() methods. These methods are needed for parallel simulation, if you want objects of this type to be transmitted across partitions.
It is customary to implement the copy constructor and the assignment operator so that they delegate to the same function of the base class, and invoke a common private copy() function to copy the local members.
7.13.3 Class Registration¶
You should also use the Register_Class() macro to register the new class. It is used by the createOne() factory function, which can create any object given the class name as a string. createOne() is used by the Envir library to implement omnetpp.ini options such as rng-class="..." or scheduler-class="...". (see Chapter [17])
For example, an omnetpp.ini entry such as
rng-class = "cMersenneTwister"
would result in something like the following code being executed to create the RNG objects:
cRNG *rng = check_and_cast<cRNG*>(createOne("cMersenneTwister"));
But for that to work, we needed to have the following line somewhere in the code:
Register_Class(cMersenneTwister);
createOne() is also needed by the parallel distributed simulation feature (Chapter [16]) to create blank objects to unmarshal into on the receiving side.
7.13.4 Details¶
We'll go through the details using an example. We will create a new class NewClass, redefine all the above-mentioned cObject member functions, and explain the conventions, rules and tips associated with them. To demonstrate as much as possible, the class will contain an int data member, dynamically allocated non-cObject data (an array of doubles), an OMNeT++ object as a data member (a cQueue), and a dynamically allocated OMNeT++ object (a cMessage).
The class declaration is as follows. It contains the declarations of all methods discussed in the previous section.
//
// file: NewClass.h
//
#include <omnetpp.h>
class NewClass : public cObject
{
protected:
int size;
double *array;
cQueue queue;
cMessage *msg;
...
private:
void copy(const NewClass& other); // local utility function
public:
NewClass(const char *name=nullptr, int d=0);
NewClass(const NewClass& other);
virtual ~NewClass();
virtual NewClass *dup() const;
NewClass& operator=(const NewClass& other);
virtual void forEachChild(cVisitor *v);
virtual std::string str();
};
We'll discuss the implementation method by method. Here is the top of the .cc file:
//
// file: NewClass.cc
//
#include <cstdio>
#include <cstring>
#include <iostream>
#include "newclass.h"
Register_Class(NewClass);
NewClass::NewClass(const char *name, int sz) : cObject(name)
{
size = sz;
array = new double[size];
take(&queue);
msg = nullptr;
}
The constructor (above) calls the base class constructor with the name of the object, then initializes its own data members. You need to call take() for cOwnedObject-based data members.
NewClass::NewClass(const NewClass& other) : cObject(other)
{
size = -1; // needed by copy()
array = nullptr;
msg = nullptr;
take(&queue);
copy(other);
}
The copy constructor relies on the private copy() function. Note that pointer members have to be initialized (to nullptr or to an allocated object/memory) before calling the copy() function.
You need to call take() for cOwnedObject-based data members.
NewClass::~NewClass()
{
delete [] array;
if (msg->getOwner()==this)
delete msg;
}
The destructor should delete all data structures the object allocated. cOwnedObject-based objects should only be deleted if they are owned by the object -- details will be covered in section [7.14].
NewClass *NewClass::dup() const
{
return new NewClass(*this);
}
The dup() function is usually just one line, like the one above.
NewClass& NewClass::operator=(const NewClass& other)
{
if (&other==this)
return *this;
cOwnedObject::operator=(other);
copy(other);
return *this;
}
The assignment operator (above) first makes sure it will not try to copy the object to itself, because that can be disastrous. If so (that is, &other==this), the function returns immediately without doing anything.
The base class part is copied via invoking the assignment operator of the base class. Then the method copies over the local members using the copy() private utility function.
void NewClass::copy(const NewClass& other)
{
if (size != other.size) {
size = other.size;
delete array;
array = new double[size];
}
for (int i = 0; i < size; i++)
array[i] = other.array[i];
queue = other.queue;
queue.setName(other.queue.getName());
if (msg && msg->getOwner()==this)
delete msg;
if (other.msg && other.msg->getOwner()==const_cast<cMessage*>(&other))
take(msg = other.msg->dup());
else
msg = other.msg;
}
Complexity associated with copying and duplicating the object is concentrated in the copy() utility function.
Data members are copied in the normal C++ way. If the class contains pointers, you will most probably want to make a deep copy of the data where they point, and not just copy the pointer values.
If the class contains pointers to OMNeT++ objects, you need to take ownership into account. If the contained object is not owned then we assume it is a pointer to an “external” object, consequently, we only copy the pointer. If it is owned, we duplicate it and become the owner of the new object. Details of ownership management will be covered in section [7.14].
void NewClass::forEachChild(cVisitor *v)
{
v->visit(queue);
if (msg)
v->visit(msg);
}
The forEachChild() function should call v->visit(obj) for each obj member of the class. See the API Reference for more information about forEachChild().
std::string NewClass::str()
{
std::stringstream out;
out << "data=" << data << ", array[0]=" << array[0];
return out.str();
}
The str() method should produce a concise, one-line string about the object. You should try not to exceed 40-80 characters, since the string will be shown in tooltips and listboxes.
See the virtual functions of cObject and cOwnedObject in the class library reference for more information. The sources of the Sim library (include/, src/sim/) can serve as further examples.
7.14 Object Ownership Management¶
7.14.1 The Ownership Tree¶
OMNeT++ has a built-in ownership management mechanism which is used for sanity checks, and as part of the infrastructure supporting Qtenv inspectors.
Container classes like cQueue own the objects inserted into them, but this is not limited to objects inserted into a container: every cOwnedObject-based object has an owner all the time. From the user's point of view, ownership is managed transparently. For example, when you create a new cMessage, it will be owned by the simple module. When you send it, it will first be handed over to (i.e., change ownership to) the FES, and, upon arrival, to the destination simple module. When you encapsulate the message in another one, the encapsulating message will become the owner. When you decapsulate it again, the currently active simple module becomes the owner.
The getOwner() method, defined in cObject, returns the owner of the object:
cOwnedObject *o = msg->getOwner();
EV << "Owner of " << msg->getName() << " is: " <<
<< "(" << o->getClassName() << ") " << o->getFullPath() << endl;
The other direction, enumerating the objects owned, can be implemented with the forEachChild() method by looping through all contained objects and checking the owner of each object.
7.14.1.1 Why Do We Need This?¶
The traditional concept of object ownership is associated with the “right to delete” objects. In addition to that, keeping track of the owner and the list of objects owned also serves other purposes in OMNeT++:
- enables methods like getFullPath() to be implemented.
- prevents certain types of programming errors related to incorrect
ownership handling.
- enables Qtenv to display the list of simulation objects present within a simple module. This is extremely useful for finding memory leaks caused by forgetting to delete messages that are no longer needed.
Some examples of programming errors that can be caught by the ownership facility:
- attempts to send a message while it is still in a queue,
encapsulated in another message, etc.
- attempts to send/schedule a message while it is still owned
by the simulation kernel (i.e., scheduled as a future event)
- attempts to send the same message object to multiple destinations at the same time (i.e., to all connected modules)
For example, the send() and scheduleAt() functions check that the message being sent/scheduled is owned by the module. If it is not, then it signals a programming error: the message is probably owned by another module (already sent earlier?), or currently scheduled, or inside a queue, a message or some other object -- in either case, the module does not have any authority over it. When you get the error message ("not owner of object"), you need to carefully examine the error message to determine which object has ownership of the message and correct the logic that caused the error.
The above errors are easy to make in the code, and if not detected automatically, they could cause random crashes which are usually very difficult to track down. Of course, some errors of the same kind still cannot be detected automatically, like calling member functions of a message object which has been sent to (and so is currently owned by) another module.
7.14.2 Managing Ownership¶
Ownership is managed transparently for the user, but this mechanism has to be supported by the participating classes themselves. It will be useful to look inside cQueue and cArray, because they might give you a hint of what behavior you need to implement when you want to use non-OMNeT++ container classes to store messages or other cOwnedObject-based objects.
7.14.2.1 Insertion¶
cArray and cQueue have internal data structures (array and linked list) to store the objects which are inserted into them. However, they do not necessarily own all of these objects. (Whether they own an object or not can be determined from that object's getOwner() pointer.)
The default behavior of cQueue and cArray is to take ownership of the objects inserted. This behavior can be changed via the takeOwnership flag.
Here is what the insert operation of cQueue (or cArray) does:
- inserts the object into the internal array/list data structure
- if the takeOwnership flag is true, it takes ownership of the object, otherwise just leaves it with its original owner
The corresponding source code:
void cQueue::insert(cOwnedObject *obj)
{
// insert into queue data structure
...
// take ownership if needed
if (getTakeOwnership())
take(obj);
}
7.14.2.2 Removal¶
Here is what the remove family of operations in cQueue (or cArray) does:
- removes the object from the internal array/list data structure
- if the object is actually owned by this cQueue/cArray, releases ownership of the object, otherwise just leaves it with its current owner
After the object is removed from a cQueue/cArray, you may further use it, or if it is no longer needed, you can delete it.
The release ownership phrase requires further explanation. When you remove an object from a queue or array, the ownership is expected to be transferred to the simple module's local objects list. This is accomplished by the drop() function, which transfers the ownership to the object's default owner. getDefaultOwner() is a virtual method defined in cOwnedObject, and its implementation returns the currently executing simple module's local object list.
As an example, the remove() method of cQueue is
implemented like this:
- [Actual code in src/sim is structured somewhat
differently, but the meaning is the same.]
cOwnedObject *cQueue::remove(cOwnedObject *obj)
{
// remove object from queue data structure
...
// release ownership if needed
if (obj->getOwner()==this)
drop(obj);
return obj;
}
7.14.2.3 Destructor¶
The concept of ownership is that the owner has the exclusive right and duty to delete the objects it owns. For example, if you delete a cQueue containing cMessages, all messages it contains and owns will also be deleted.
The destructor should delete all data structures the object allocated. From the contained objects, only the owned ones are deleted -- that is, where obj->getOwner()==this.
7.14.2.4 Object Copying¶
The ownership mechanism also has to be taken into consideration when a cArray or cQueue object is duplicated (using dup() or the copy constructor.) The duplicate is supposed to have the same content as the original; however, the question is whether the contained objects should also be duplicated or only their pointers taken over to the duplicate cArray or cQueue. A similar question arises when an object is copied using the assignment operator (operator=()).
The convention followed by cArray/cQueue is that only owned objects are copied, and the contained but not owned ones will have their pointers taken over and their original owners left unchanged.
8 Graphics and Visualization¶
8.1 Overview¶
OMNeT++ simulations can be run under graphical user interfaces like Qtenv that offer visualization and animation, along with interactive execution and other features. This chapter deals with model visualization.
OMNeT++ essentially provides four main tools for defining and enhancing model visualization:
- Display strings are the traditional way. They are
per-component strings that encode how the component (module or channel)
will appear in the graphical user interface. Display strings can be
specified in NED files and can also be manipulated programmatically at
runtime.
- The canvas. The same user interface area that contains
submodules and connections (i.e. the canvas) can also display
additional graphical elements that OMNeT++ calls figures. Using
figures, one can display lines, curves, polygons, images, and text items,
as well as anything that can be created by combining them and applying effects like
rotation and scaling. Like display strings, figures can also be specified
in NED files, but it is generally more useful to create and manipulate them
programmatically. Every module has its own default canvas, and extra canvases
can also be created at runtime.
- 3D visualization of the simulation's virtual world is a
third possibility. OMNeT++'s 3D visualization capabilities come from the
open-source OpenSceneGraph library and its osgEarth extension. These
libraries build on top of OpenGL, and beyond basic graphics functionality,
they also offer high-level capabilities, such as reading 3D model files
directly from disk or displaying maps, 3D terrain, or Earth as a planet
using online map and satellite imagery data sources.
- Support for smooth custom animation allows models to visualize their operation using sophisticated animations. The key idea is that the simulation model is called back from the runtime GUI (Qtenv) repeatedly at a reasonable “frame rate,” allowing it to continually update the canvas (2D) and/or the 3D scene to produce fluid animations.
The following sections will cover the above topics in more detail. But first, let us get acquainted with a new cModule virtual method that one can redefine and place visualization-related code into.
8.2 Placement of Visualization Code¶
Traditionally, when C++ code was needed to enhance visualization, such as updating a displayed status label or refreshing the position of a mobile node, it was embedded in the handleMessage() function, enclosed in if (ev.isGUI()) blocks. This approach was less than ideal because the visualization code would run for all events in that module, not just before display updates when it was actually needed. In Express mode, for example, Qtenv would only refresh the display once every second or so, with a large number of events processed between updates. Therefore, visualization code placed inside handleMessage() could potentially waste a significant amount of CPU cycles. Additionally, visualization code embedded in handleMessage() is not suitable for creating smooth animations.
8.2.1 The refreshDisplay() Method¶
Starting from OMNeT++ version 5.0, visualization code can be placed into a dedicated method called refreshDisplay(). Using this method is more efficient than embedding visualization code into handleMessage(), because refreshTheDisplay() is called only as often as necessary by the graphical user interface to keep the display up to date.
refreshDisplay() is declared on cModule as:
virtual void refreshDisplay() const {}
Components that contain visualization-related code are expected to override refreshDisplay() and move visualization code, such as display string manipulation, canvas figure maintenance, and OSG scene graph updates, into it.
When and how is refreshDisplay() invoked? Generally, it is invoked right before the GUI performs a display update. With some additional rules, this boils down to the following:
- It is invoked only under graphical user interfaces, currently Qtenv. It is never invoked under Cmdenv.
- When invoked, it will be called on all components of the
simulation. It does not matter if a module has a graphical inspector
open or not. This design decision simplifies the handling
of cross-module visualization dependencies. Runtime overhead is
still not an issue, because display updates are only done at most
a few times per second in Express mode. In other modes,
raw event processing performance is of somewhat lesser importance.
- [At any rate, only a small portion of components are expected to
have (nontrivial) refreshDisplay() overrides in complex models.
If it still becomes too resource-consuming, local caching of related
data and the use of a displayInvalid flag might help.]
- It is invoked right before display updates. This includes the following: after network setup; in Step and Run modes, before and after every event; in Fast and Express modes, after every "batch" of events; every time a new graphical inspector is opened, zoomed, navigated in, or closed; after model data (cPar, cDisplayString values, etc.) is edited, and after finalization.
- If smooth animation is used, it is invoked continuously with a reasonably high frequency in Step, Run and Fast modes. This can mean anything from many times between processing two consecutive events to not even once until after the processing of a couple of events, depending on the current animation speed and event density.
Here is an example of how one would use it:
void FooModule::refreshDisplay() const
{
// refresh statistics
char buf[80];
sprintf(buf, "Sent:%d Rcvd:%d", numSent, numReceived);
getDisplayString()->setTagArg("t", 0, buf);
// update the mobile node's position
Point pos = ... // e.g. invoke a computePosition() method
getDisplayString()->setTagArg("p", 0, pos.x);
getDisplayString()->setTagArg("p", 1, pos.y);
}
One useful accessory to refreshDisplay() is the isExpressMode() method of cEnvir. It returns true if the simulation is running under a GUI in Express mode. Visualization code may check this flag and adapt the visualization accordingly. For example:
if (getEnvir()->isExpressMode()) {
// display throughput statistics
}
else {
// visualize current frame transmission
}
8.2.2 Advantages¶
Overriding refreshDisplay() has several advantages over putting the simulation code into handleMessage(). The first one is clearly performance. When running under Cmdenv, the runtime cost of visualization code is literally zero. When running in Express mode under Qtenv, it is practically zero because the cost of one update is amortized over several hundred thousand or million events.
The second advantage is also very practical: consistency of the visualization. If the simulation has cross-module dependencies such that an event processed by one module affects the information displayed by another module, with handleMessage()-based visualization, the model may have inconsistent visualization until the second module also processes an event and updates its displayed state. With refreshDisplay(), this does not happen because all modules are refreshed together.
The third advantage is separation of concerns. It is generally not a good idea to intermix simulation logic with visualization code, and refreshDisplay() allows one to completely separate the two.
8.2.3 Why is refreshDisplay() const?¶
Code in refreshDisplay() should never alter the state of the simulation because that would destroy repeatability due to the fact that the timing and frequency of refreshDisplay() calls are completely unpredictable from the simulation model's point of view. The fact that the method is declared const gently encourages this behavior.
If visualization code makes use of internal caches or maintains some other mutable state, such data members can be declared mutable to allow refreshDisplay() to change them.
8.3 Smooth Animation¶
8.3.1 Concepts¶
Support for smooth custom animation enables models to visualize their operation using sophisticated animations. The key idea is that the simulation model is called back from the runtime GUI (Qtenv) repeatedly at a reasonable “frame rate,” allowing it to continually update the canvas (2D) and/or the 3D scene to produce fluid animations. Callback means that the refreshDisplay() methods of modules and figures are invoked.
refreshDisplay() knows the animation position from the simulation time and the animation time, a variable also made accessible to the model. If you think about the animation as a movie, animation time is simply the position in seconds in the movie. By default, the movie is played in Qtenv at normal (1x) speed, and then animation time is simply the number of seconds since the start of the movie. The speed control slider in Qtenv's toolbar allows you to play it at higher (2x, 10x, etc.) and lower (0.5x, 0.1x, etc.) speeds; so if you play the movie at 2x speed, animation time will pass twice as fast as real time.
When smooth animation is turned on (more about that later), simulation time progresses in the model (piecewise) linearly. The speed at which the simulation progresses in the movie is called animation speed. Sticking to the movie analogy, when the simulation progresses in the movie 100 times faster than animation time, animation speed is 100.
Certain actions take zero simulation time, but we still want to animate them. Examples of such actions are the sending of a message over a zero-delay link, or a visualized C++ method call between two modules. When these animations play out, simulation is paused and simulation time stays constant until the animation is over. Such periods are called holds.
8.3.2 Smooth vs. Traditional Animation¶
Smooth animation is a relatively new feature in OMNeT++, and not all simulations need it. Smooth and traditonal, “non-smooth” animation in Qtenv are two distinct modes which operate very differently:
- In Traditional animation, simulation events are essentially processed as fast as possible, and meanwhile, refreshDisplay() is called with some policy (e.g. once before/after each event, or at 1s intervals real-time) to keep the displayed graphics up to date.
- Smooth animation is essentially a scaled realtime simulation, where refreshDisplay() is continually called with a reasonably high frame rate.
The factor that decides which operation mode is active is the presence of an animation speed. If there is no animation speed, traditional animation is performed; if there is one, smooth animation is done.
The Qtenv GUI has a dialog (Animation Parameters) which displays
the current animation speed, among other things. This dialog allows the
user to check at any time which operation mode is currently active.
- [
Note that even during traditional animation, some built-in animation effects
request animation speeds and holds, so there may be periods when smooth animation
is performed.]
8.3.3 The Choice of Animation Speed¶
Different animation speeds may be appropriate for different animation effects. For example, when animating WiFi traffic where various time slots are on the microsecond scale, an animation speed on the order of 10^-5 might be appropriate; when animating the movement of cars or pedestrians, an animation speed of 1 is a reasonable choice. When several animations requiring different animation speeds occur in the same scene, one solution is to animate the scene using the lowest animation speed so that even the fastest actions can be visually followed by the human viewer.
The solution provided by OMNeT++ for the above problem is the following. Animation speed cannot be controlled explicitly, only requests may be submitted. Several parts of the models may request different animation speeds. The effective animation speed is computed as the minimum of the animation speeds of visible canvases, unless the user interactively overrides it in the UI, for example by imposing a lower or upper limit.
An animation speed request may be submitted using the setAnimationSpeed()
method of cCanvas.
- [The class that represents the canvas for
2D graphics, see [8.6.2] for more
info.]
An example:
cCanvas *canvas = getSystemModule()->getCanvas(); // toplevel canvas canvas->setAnimationSpeed(2.0, this); // one request canvas->setAnimationSpeed(1e-6, macModule); // another request ... canvas->setAnimationSpeed(1.0, this); // overwrite first request canvas->setAnimationSpeed(0, macModule); // cancel second request
In practice, built-in animation effects such as message sending animation also submit their own animation speed requests internally, so they also affect the effective animation speed chosen by Qtenv.
The current effective animation speed can be obtained from the environment of the simulation (cEnvir, see chapter [18] for context):
double animSpeed = getEnvir()->getAnimationSpeed();
Animation time can be accessed like this:
double animTime = getEnvir()->getAnimationTime();
Animation time starts from zero, and monotonically increases with simulation time and also during “holds”.
8.3.4 Holds¶
As mentioned earlier, a hold interval is an interval when only animation takes place, but simulation time does not progress and no events are processed. Hold intervals are intended for animating actions that take zero simulation time.
A hold can be requested with the holdSimulationFor() method of cCanvas, which accepts an animation time delta as parameter. If a hold request is issued when there is one already in progress, the current hold will be extended as needed to incorporate the request. A hold request cannot be cancelled or shrunk.
cCanvas *canvas = getSystemModule()->getCanvas(); // toplevel canvas canvas->holdSimulationFor(0.5); // request a 0.5s (animation time) hold
When rendering frames in refreshDisplay() during a hold, the code can use animation time to determine the position in the animation. If the code needs to know the animation time elapsed since the start of the hold, it should query and remember the animation time when issuing the hold request.
If the code needs to know the animation time remaining until the end of the hold, it can use the getRemainingAnimationHoldTime() method of cEnvir. Note that this is not necessarily the time remaining from its own hold request, because other parts of the simulation might extend the hold.
8.3.5 Disabling Built-In Animations¶
If a model implements such full-blown animations for a compound module that OMNeT++'s default animations (message sending/method call animations) become a liability, they can be programmatically turned off for that module with cModule's setBuiltinAnimationsAllowed() method:
// disable animations for the toplevel module cModule *network = getSimulation()->getSystemModule(); network->setBuiltinAnimationsAllowed(false);
8.4 Display Strings¶
Display strings are concise textual descriptions that specify the arrangement and appearance of the graphical representations of modules and connections in graphical user interfaces (currently Qtenv).
Display strings are usually specified in NED's @display property, but it is also possible to modify them programmatically at runtime.
Display strings can be used in the following contexts:
- submodules -- display strings can contain position, arrangement (for module vectors), icon, icon color, auxiliary icon, status text, communication range (as a circle or filled circle), tooltip, etc.
- compound modules, networks -- display strings can specify background color, border color, border width, background image, scaling, grid, and unit of measurement, etc.
- connections -- display strings can specify positioning, color, line width, line style, text, and tooltip
- messages -- display strings can specify icon, icon color, etc.
8.4.1 Syntax and Placement¶
8.4.1.1 Syntax¶
Display strings are specified in @display properties in NED files. The property must contain a single string value. The string should consist of a semicolon-separated list of tags. Each tag consists of a key, an equal sign, and a comma-separated list of arguments:
@display("p=100,100;b=60,10,rect,blue,black,2")
Tag arguments may be omitted both at the end and inside the parameter list. If an argument is omitted, a reasonable default value is used. In the following example, the first and second arguments of the b tag are omitted.
@display("p=100,100;b=,,rect,blue")
8.4.1.2 Placement¶
Display strings can be placed in the parameters section of module and channel type definitions, as well as in submodules and connections. The following NED sample illustrates the placement of display strings in the code:
simple Server
{
parameters:
@display("i=device/server");
...
}
network Example
{
parameters:
@display("bgi=maps/europe");
submodules:
server: Server {
@display("p=273,101");
}
...
connections:
client1.out --> { @display("ls=red,3"); } --> server.in++;
}
8.4.1.3 Quoting¶
Since commas and semicolons are part of the display string syntax, they need to
be escaped in the NED file when they occur as part of a value (e.g., annotation
label or tooltip text). Specifically, to include a comma, semicolon, or equal
sign in a tag value, it should be prefixed with two backslashes:
,,
;,
=. To include a literal backslash in a tag
value, it should be written as four backslashes:
\\\\. Tab or
newline characters can be included in a tag value by writing them as
\t and \n, respectively.
The reason for the above rules is that display strings specified in NED files are string literals, so backslash escape sequences are interpreted by the NED parser first. It handles tabs, newlines, and literal backslashes and quotation marks. Double backslashes become single backslashes after this step. Then, the string value is parsed by the display string parser, which splits the string into tags and values. In this step, the remaining backslashes that are in front of commas, semicolons, or equal signs remove their special meanings, a backslash in front of another backslash generates a single backslash, and the rest of the backslashes are ignored.
Examples:
@display("t=Hello\\, world!"); // -> Hello, world!
@display("t=C:\\\\Windows\\\\Temp"); // -> C:\Windows\Temp
@display("t=\"Hello\\,\" Martin said."); // -> "Hello," Martin said.
8.4.1.4 Parameter References¶
In addition to literal values, display strings may also contain embedded NED expressions and references to module/channel parameters, made available with the ${...} and $foo syntaxes, respectively. These features are described in detail in [8.4.7] and [8.4.8]. To add a literal dollar sign to a display string value, double it:
@display("t=Price: $$50"); // -> Price: $50
Commas and semicolons inside ${...} do not need to be escaped with a backslash.
8.4.2 Inheritance¶
At runtime, every module and channel object has a single display string object that controls its appearance in various contexts. The initial value of this display string object comes from merging the @display properties occurring at various places in NED files. This section describes the rules for merging @display properties to create the module or channel's display string.
- Derived NED types inherit their display string from their base NED type.
- Submodules inherit their display string from their type.
- Connections inherit their display string from their channel type.
The base NED type's display string is merged into the current display string using the following rules:
- Inheriting. If a tag or tag argument is present in the base display string but not in the current one, it will be added to the result. Example: "i=block/sink" (base) + "p=20,40;i=,red" (current) --> "p=20,40;i=block/sink,red"
- Overwriting. If a tag argument is present in both the base and current display strings, the tag argument in the current display string will take priority. Example: "b=40,20,oval" + "b=,30" --> "b=40,30,oval"
- Erasing. If the current display string contains a tag argument with the value “-” (hyphen), that tag argument will be empty in the result. Example: "i=block/sink,red" + "i=,-" --> "i=block/sink"
The result of merging the @display properties will be used to initialize the display string object (cDisplayString) of the module or channel. The display string object can then still be modified programmatically at runtime.
- NOTE
If a tag argument is empty, the GUI may use a suitable default value. For example, if the border color for a rectangle is not specified in the display string, the GUI may use black. This default value cannot be queried programmatically.
Example of display string inheritance:
simple Base {
@display("i=block/queue"); // use a queue icon in all instances
}
simple Derived extends Base {
@display("i=,red,60"); // ==> "i=block/queue,red,60"
}
network SimpleQueue {
submodules:
submod: Derived {
@display("i=,yellow,-;p=273,101;r=70");
// ==> "i=block/queue,yellow;p=273,101;r=70"
}
...
}
8.4.3 Submodule Tags¶
The following tags of the module display string are in effect in submodule context, that is, when the module is displayed as a submodule of another module:
- i -- icon
- is -- icon size
- i2 -- auxiliary or status icon
- b -- shape (box, oval, etc.)
- p -- positioning and layout
- g -- layout group
- r -- range indicator
- q -- queue information text
- t -- text
- tt -- tooltip
The following sections provide an overview and examples for each tag. More detailed information, such as what each tag argument means, is available in Appendix [25].
8.4.3.1 Icons¶
By default, modules are displayed with a simple default icon, but OMNeT++ comes with a large set of categorized icons to choose from. To see what icons are available, look into the images/ folder in the OMNeT++ installation. The stock icons installed with OMNeT++ have several size variants. Most of them have very small (vs), small (s), large (l), and very large (vl) versions.
One can specify the icon with the i tag. The icon name should be given with the name of the subfolder under images/, but without the file name extension. The size may be specified with the icon name suffix (_s for very small, _vl for very large, etc.), or in a separate is tag.
An example that displays the block/source icon in a large size:
@display("i=block/source;is=l");
Icons can also be colorized, which can often be useful. Color can indicate the status or grouping of the module, or simply serve aesthetic purposes. The following example makes the icon 20% red:
@display("i=block/source,red,20");

8.4.3.2 Status Icon¶
Modules can also display a small auxiliary icon in the top-right corner of the main icon. This icon can be useful for displaying the status of the module, for example, and can be set with the i2 tag. Icons suitable for use with i2 are in the status/ category.
An example:
@display("i=block/queue;i2=status/busy");

8.4.3.3 Shapes¶
To have a simple but resizable representation for a module, one can use the b tag to create geometric shapes. Currently, oval and rectangle are supported.
The following example displays an oval shape with a size of 70x30, a 4-pixel black border, and red fill:
@display("b=70,30,oval,red,black,4");

8.4.3.4 Positioning¶
The p tag allows one to define the position of a submodule or otherwise affect its placement.
- NOTE
If the p tag is missing or doesn't specify the position, OMNeT++ will use a layouting algorithm to automatically place the module. The layouting algorithm is covered in section [8.4.11].
The following example will place the module at the given position:
@display("p=50,79");
- NOTE
Coordinates and distances in p, b or r tags need not be integers. Fractional numbers make sense because runtime GUIs like Qtenv support zooming.
If the submodule is a module vector, one can also specify in the p tag how to arrange the elements of the vector. They can be arranged in a row, a column, a matrix or a ring. The rest of the arguments in the p tag depend on the layout type:
TODO refine, e.g. list accepted abbreviations for matrix etc; what if x,y are missing; delta args are optional; etc
- Row: p=x,y,r,deltaX (A row of modules with deltaX units between the modules)
- Column: p=x,y,c,deltaY (A column of modules with deltaY units between the modules)
- Matrix: p=x,y,m,numCols,deltaX,deltaY (A matrix with numCols columns, with deltaX and deltaY units between rows and columns)
- Ring p=x,y,ri,rx,ry (A ring (oval) with rx and ry as the horizontal and vertical radius.)
- Exact (default): p=x,y,x,deltaX,deltaY (Place each module at (x+deltaX, y+deltaY). The coordinates are often set at runtime.)
A matrix layout for a module vector (note that the first two arguments, x and y are omitted, so the submodule matrix as a whole will be placed by the layouter algorithm):
host[20]: Host {
@display("p=,,m,4,50,50");
}
8.4.3.5 Layout Group¶
Layout groups allow modules that are not part of the same submodule vector to be arranged in a row, column, matrix, or ring formation as described in the p tag's third (and further) parameters.
The g tag expects a single string parameter, the group name. All sibling modules that share the same group name are treated for layouting purposes as if they were part of the same submodule vector, with the “index” being the order of submodules within their parent.
8.4.3.6 Wireless Range¶
In wireless simulations, it is often useful to display a circle or disc around the module to indicate transmission range, reception range, or interference range. This can be done with the r tag.
In the following example, the module will have a circle with a radius of 90 units as a range indicator:
submodules:
ap: AccessPoint {
@display("p=50,79;r=90");
}
8.4.3.7 Queue Length¶
If a module contains a queue object (cQueue), it is possible to display the queue length next to the module icon in the graphical user interface. To achieve this, one needs to specify the queue object's name (the string set via the setName() method) in the q display string tag. OMNeT++ finds the queue object by traversing the object tree inside the module.
The following example displays the length of the queue named "jobQueue":
@display("q=jobQueue");
8.4.3.8 Text and Tooltip¶
It is possible to display a short text next to or above the module icon or shape using the t tag in the display string. The tag allows one to specify the placement (left, right, above) and the color of the text. To display text in a tooltip, use the tt tag.
The following example displays text above the module icon and also adds tooltip text that can be seen by hovering over the module icon with the mouse:
@display("t=Packets sent: 18;tt=Additional tooltip information");
- NOTE
The t and tt tags, when set at runtime, can be used to display information about the module's state. The setTagArg() method of cDisplayString can be used to update the text: getDisplayString().setTagArg("t", 0, str);
For a detailed descripton of the display string tags, check Appendix [25].
8.4.4 Background Tags¶
The following tags of the module display string are in effect when the module itself is opened in a GUI. These tags mostly deal with the visual properties of the background rectangle.
- bgb -- size, color and border of the background rectangle
- bgi -- background image and its display mode
- bgtt -- tooltip above the background
- bgg -- background grid: color, spacing, etc.
- bgu -- measurement unit of coordinates/distances
In the following example, the background area is defined to be 6000x4500 units, and the map of Europe is used as a background, stretched to fill the whole area. A grid is also drawn, with 1000 units between major ticks, and 2 minor ticks per major tick.
network EuropePlayground
{
@display("bgb=6000,4500;bgi=maps/europe,s;bgg=1000,2,grey95;bgu=km");
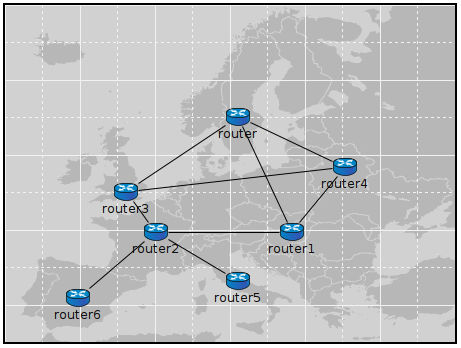
The bgu tag deserves special attention. It does not affect the visual appearance, but instead it is a hint for model code on how to interpret coordinates and distances in this compound module. The above example specifies bgu=km, which means that if the model attaches physical meaning to coordinates and distances, then those numbers should be interpreted as kilometers.
More detailed information, such as what each tag argument means, is available in Appendix [25].
8.4.5 Connection Display Strings¶
Connections may also have display strings. Connections inherit the display string property from their channel types, in the same way as submodules inherit theirs from module types. The default display strings are empty.
Connections support the following tags:
- ls -- line style and color
- t -- text
- tt -- tooltip
- m -- orientation and positioning
Example of a thick, red connection:
source1.out --> { @display("ls=red,3"); } --> queue1.in++;
- NOTE
To hide a connection, specify zero line width in the display string: "ls=,0".
More detailed information, such as what each tag argument means, is available in Appendix [25].
8.4.6 Message Display Strings¶
Message display strings affect how messages are shown during animation. By default, they are displayed as a small filled circle, in one of 8 basic colors (the color is determined as message kind modulo 8), and with the message class and/or name displayed under it. The latter is configurable in the Preferences dialog of Qtenv, and message kind dependent coloring can also be turned off there.
8.4.6.1 How to Specify¶
Message objects do not store a display string by default. Instead, cMessage defines a virtual getDisplayString() method that one can override in subclasses to return an arbitrary string. The following example adds a display string to a new message class:
class Job : public cMessage
{
public:
const char *getDisplayString() const {return "i=msg/packet;is=vs";}
//...
};
Since message classes are often defined in msg files (see chapter [6]), it is often convenient to let the message compiler generate the getDisplayString() method. To achieve that, add a string field named displayString with an initializer to the message definition. The message compiler will generate setDisplayString() and getDisplayString() methods into the new class, and also set the initial value in the constructor.
An example message file:
message Job
{
string displayString = "i=msg/package_s,kind";
//...
}
8.4.6.2 Tags¶
The following tags can be used in message display strings:
- b -- shape, color
- i -- icon
- is -- icon size
- NOTE
In message display strings, kind is accepted as a special color name. It will cause the color to be derived from message kind field in the message.
The following example displays a small red box icon:
@display("i=msg/box,red;is=s");
The next one displays a 15x15 rectangle, with while fill, and with a border color dependent on the message kind:
@display("b=15,15,rect,white,kind,5");
More detailed information, such as what each tag argument means, is available in Appendix [25].
8.4.7 Parameter Substitution¶
In addition to literal values, display strings may also contain embedded NED expressions and references to module/channel parameters, made available with the ${...} and $foo syntaxes, respectively. To add a literal dollar sign to a display string value, double it.
Here is an example for referencing module/channel parameters:
simple MobileNode
{
parameters:
double xpos;
double ypos;
string fillColor;
// get the values from the module parameters xpos,ypos,fillcolor
@display("p=$xpos,$ypos;b=60,10,rect,$fillColor,black,2");
}
There is also a fallback to the parameters of the parent component.
8.4.8 Embedded Expressions¶
Arbitrary NED expressions can be embedded in display strings using the ${...} notation. These expressions are evaluated in the context of the display string's owner component, which means that identifiers refer to the parameters of the component.
As opposed to the $foo syntax, there is no fallback to the parameters of the parent module. To refer to the parent module's foo parameter, the parameter name must be qualified with the parent keyword: ${parent.foo}.
@display("p=${parent.xpos + r*cos(phi)},${$parent.ypos + r*sin(phi)}");
These expressions are evaluated every time the appearance of the component is refreshed, so volatile parameters and random numbers will take effect at every display refresh.
8.4.9 Colors¶
8.4.9.1 Color Names¶
A color may be given in several forms. One form is English names: blue, lightgrey, wheat, etc. The list includes all standard SVG color names.
Another acceptable form is the HTML RGB syntax: #rgb or #rrggbb, where r, g, b are hexadecimal digits.
Colors can also be specified in HSB (hue-saturation-brightness) as @hhssbb (with h, s, b being hexadecimal digits). HSB makes it easier to scale colors, e.g., from white to bright red.
One can produce a transparent background by specifying a hyphen ("-") as the background color.
In message display strings, kind can also be used as a special color name. It will map the message kind to a color. (See the getKind() method of cMessage.)
8.4.9.2 Icon Colorization¶
The "i=" display string tag allows for colorization of icons. It accepts a target color and a percentage as the degree of colorization. The percentage has no effect if the target color is missing. The brightness of the icon is also affected. To keep the original brightness, specify a color with about 50% brightness (e.g., #808080 mid-grey, #008000 mid-green).
Examples:
- "i=device/server,gold" creates a gold server icon
- "i=misc/globe,#808080,100" makes the icon greyscale
- "i=block/queue,white,100" yields a "burnt-in" black-and-white icon
Colorization works with both submodule and message icons.
8.4.10 Icons¶
8.4.10.1 The Image Path¶
In the current OMNeT++ version, module icons are PNG or GIF files. The icons shipped with OMNeT++ are in the images/ subdirectory. The IDE and Qtenv need the exact location of this directory to be able to load the icons.
Icons are loaded from all directories in the image path, a semicolon-separated list of directories. The default image path is compiled into Qtenv with the value "<omnetpp>/images;./images". This works fine (unless the OMNeT++ installation is moved), and the ./images part also allows icons to be loaded from the images/ subdirectory of the current directory. As users typically run simulation models from the model's directory, this practically means that custom icons placed in the images/ subdirectory of the model's directory are automatically loaded.
The compiled-in image path can be overridden with the OMNETPP_IMAGE_PATH environment variable. The way of setting environment variables is system specific. In Unix, if one is using the bash shell, adding a line
export OMNETPP_IMAGE_PATH="$HOME/omnetpp/images;./images"
to ~/.bashrc or ~/.bash_profile will do. On Windows, environment variables can be set via the My Computer --> Properties dialog.
One can extend the image path from omnetpp.ini with the image-path option, which is prepended to the environment variable's value.
[General] image-path = "/home/you/model-framework/images;/home/you/extra-images"
8.4.10.2 Categorized Icons¶
Icons are organized into several categories, represented by folders. These categories include:
- abstract/ - symbolic icons for various devices
- background/ - images useful as background, such as terrain maps
- block/ - icons for subcomponents (queues, protocols, etc.)
- device/ - network device icons: servers, hosts, routers, etc.
- misc/ - icons for nodes, subnets, clouds, buildings, towns, cities, etc.
- msg/ - icons that can be used for messages
- status/ - status icons such as up, down, busy, etc.
Icon names to be used with the i, bgi, and other tags should contain the subfolder (category) name but not the file extension. For example, /opt/omnetpp/images/block/sink.png should be referred to as block/sink.
8.4.10.3 Icon Size¶
Icons come in various sizes: normal, large, small, very small, and very large. Sizes are encoded into the icon name's suffix: _vl, _l, _s, _vs. In display strings, one can either use the suffix ("i=device/router_l") or the "is" (icon size) display string tag ("i=device/router;is=l"), but not both at the same time (we recommend using the is tag).
8.4.11 Layouting¶
OMNeT++ implements an automatic layouting feature using a variation of the Spring Embedder algorithm. Modules that have not been assigned explicit positions via the "p=" tag will be automatically placed by the algorithm.
Spring Embedder is a graph layouting algorithm based on a physical model. Graph nodes (modules) repel each other like electric charges of the same sign, and connections act as springs that pull nodes together. There is also friction built in to prevent oscillation of the nodes. The layouting algorithm simulates this physical system until it reaches equilibrium (or times out). The physical rules mentioned earlier have been slightly tweaked to achieve better results.
The algorithm doesn't move any module that has fixed coordinates. Modules that are part of a predefined arrangement (row, matrix, ring, etc., defined via the 3rd and further args of the "p=" tag) will be moved together to preserve their relative positions.
- NOTE
The positions of modules placed by the layouting algorithm are not available from simulation models. Consider what positions OMNeT++ should report if the model is run under Cmdenv or under Qtenv but the compound module was never opened in the GUI. The absence of explicit coordinates in the NED file conceptually means that the modeler doesn't care about the position of that module.
Caveats:
- If the full graph is too big after layouting, it will be scaled back to fit on the screen, unless it contains any fixed-position modules. To prevent rescaling, one can specify a sufficiently large bounding box in the background display string, e.g., "b=2000,3000".
- Submodule size is ignored by the present layouter, so modules with elongated shapes may not be placed ideally.
- The algorithm may produce erratic results, especially for small graphs when the number of submodules is small or when using predefined (matrix, row, ring, etc.) layouts. In such cases, the Relayout toolbar button can be useful. Larger networks usually produce satisfactory results.
- The algorithm starts by placing the nodes randomly, and this initial arrangement greatly affects the end result. The algorithm has its own random number generator (RNG) that starts from a default seed. The Relayout button changes this seed, and the seed is persistently stored so that later runs of the model will produce the same layout.
8.4.12 Changing Display Strings at Runtime¶
It is often useful to manipulate the display string at runtime. Changing colors, icons, or text may convey status changes, and changing a module's position is useful when simulating mobile networks.
Display strings are stored in cDisplayString objects inside channels, modules, and gates. cDisplayString also allows one to manipulate the string.
As far as cDisplayString is concerned, a display string (e.g., "p=100,125;i=cloud") is a string that consists of several tags separated by semicolons, and each tag has a name and zero or more arguments separated by commas.
The class facilitates tasks such as finding out what tags a display string has, adding new tags, adding arguments to existing tags, removing tags, or replacing arguments. The internal storage method allows very fast operation, which is generally faster than direct string manipulation. The class doesn't try to interpret the display string in any way, nor does it know the meaning of the different tags. It merely parses the string as data elements separated by semicolons, equal signs, and commas.
To get a pointer to a cDisplayString object, one can call the component's getDisplayString() method.
- NOTE
The connection display string is stored in the channel object, but it can also be accessed via the source gate of the connection.
The display string can be overwritten using the parse() method. Tag arguments can be set with setTagArg(), and tags removed with removeTag().
The following example sets a module's position, icon, and status icon in one step:
cDisplayString& dispStr = getDisplayString();
dispStr.parse("p=40,20;i=device/cellphone;i2=status/disconnect");
Setting an outgoing connection's color to red:
cDisplayString& connDispStr = gate("out")->getDisplayString();
connDispStr.parse("ls=red");
Setting module background and grid with background display string tags:
cDisplayString& parentDispStr = getParentModule()->getDisplayString();
parentDispStr.parse("bgi=maps/europe;bgg=1000,2");
The following example updates a display string to contain the p=40,20 and i=device/cellphone tags:
dispStr.setTagArg("p", 0, 40);
dispStr.setTagArg("p", 1, 20);
dispStr.setTagArg("i", 0, "device/cellphone");
8.5 Bubbles¶
Modules can display a transient bubble with a short message (e.g. "Going down" or "Connection established") by calling the bubble() method of cComponent. The method takes the string to be displayed as a const char * pointer.
An example:
bubble("Going down!");
If the module often displays bubbles, it is recommended to make the corresponding code conditional on hasGUI(). The hasGUI() method returns false if the simulation is running under Cmdenv.
if (hasGUI()) {
char text[32];
sprintf(text, "Collision! (%s frames)", numCollidingFrames);
bubble(text);
}
8.6 The Canvas¶
8.6.1 Overview¶
The canvas is the 2D drawing API of OMNeT++. It allows users to display lines, curves, polygons, images, text items, and combinations of these elements. The canvas API provides features such as color, transparency, geometric transformations, antialiasing, and more. Drawings created with the canvas API can be viewed when running the simulation under a graphical user interface like Qtenv.
The canvas API can be used for various purposes, such as displaying textual annotations, status information, live statistics in the form of plots, charts, gauges, counters, etc. In different types of simulations, the canvas API can be used to draw different types of graphical presentations. For example, in mobile and wireless simulations, the canvas API can be used to draw the scene including a background (such as a street map or floor plan), mobile objects (vehicles, people), obstacles (trees, buildings, hills), antennas with orientation, and additional information like connectivity graphs, movement trails, and individual transmissions.
Multiple canvases can be created, and each module already has a default canvas. The default canvas is the one on which the module's submodules and internal connections are displayed. The default canvas can be enhanced using the canvas API to enrich the default presentation of a compound module.
In OMNeT++, the items that appear on a canvas are called figures. The corresponding C++ types for figures are cCanvas and cFigure. cFigure is an abstract base class, and different types of figures are represented by various subclasses of cFigure.
Figures can be defined statically in NED files using @figure properties, and can also be accessed, created, and manipulated programmatically at runtime.
8.6.2 Creating, Accessing, and Viewing Canvases¶
A canvas is represented by the cCanvas C++ class. The default canvas of a module can be accessed with the getCanvas() method of cModule. For example, a toplevel submodule can obtain the network's canvas with the following line of code:
cCanvas *canvas = getParentModule()->getCanvas();
By using the canvas pointer, it is possible to check the figures it contains, add new figures, manipulate existing ones, and perform other operations.
New canvases can be created by instantiating new cCanvas objects. For example:
cCanvas *canvas = new cCanvas("liveStatistics");
To view the contents of additional canvases in Qtenv, one needs to navigate to the owner object of the canvas (usually the module that created the canvas), view the list of objects it contains, and double-click the canvas in the list. Giving meaningful names to extra canvas objects can simplify the process of locating them in the Qtenv GUI.
8.6.3 Figure Classes¶
The base class of all figure classes is cFigure. The class hierarchy is shown in figure below.

In the following sections, we will first describe features that are common to all figures, then briefly cover each figure class, and finally discuss how one can define new figure types.
- NOTE
Figures are only data storage classes. The actual drawing code is implemented in Qtenv, which might involve a parallel data structure, figure renderer classes, etc. When the canvas is not viewed, corresponding objects in Qtenv do not exist. Therefore, the data flow is largely one-directional -- from figures to GUI.
8.6.4 The Figure Tree¶
Figures on a canvas are organized into a tree structure. The canvas has a hidden root figure, and all top-level figures are its children. Any figure can contain child figures, not just dedicated ones like cGroupFigure.
Every figure has a name string, inherited from cNamedObject. Since figures are organized in a tree, every figure also has a hierarchical name. It consists of the names of figures in the path from the root figure down to the figure, joined with dots. (The name of the root figure itself is omitted.)
Child figures can be added to a figure using the addFigure() method, or inserted into the child list relative to a sibling using the insertBefore() and insertAfter() methods. addFigure() has two variants: one for appending and one for inserting at a specific position. Child figures can be accessed by name using getFigure(name), or enumerated by index in the child list using getFigure(k) and getNumFigures(). The index of a child figure can be obtained using findFigure(). The removeFromParent() method can be used to remove a figure from its parent.
For convenience, cCanvas also provides methods like addFigure(), getFigure(), and getNumFigures() for managing top-level figures without the need to go through the root figure.
The following code enumerates the children of a figure named "group1":
cFigure *parent = canvas->getFigure("group1");
ASSERT(parent != nullptr);
for (int i = 0; i < parent->getNumFigures(); i++)
EV << parent->getFigure(i)->getName() << endl;
It is also possible to locate a figure by its hierarchical name (getFigureByPath()) and to find a figure by its non-hierarchical name anywhere in a figure subtree (findFigureRecursively()).
The dup() method of figure classes only duplicates the figure it is called on. (The duplicate will not have any children.) To clone a figure including its children, use the dupTree() method.
8.6.5 Creating and Manipulating Figures from NED and C++¶
As mentioned earlier, figures can be defined in the NED file, so they do not always need to be created programmatically. This possibility is useful for creating static backgrounds or statically defining placeholders for dynamically displayed items, among other use cases. Figures defined from NED can be accessed and manipulated from C++ code in the same way as dynamically created ones.
Figures are defined in NED by adding @figure properties to a module definition. The hierarchical name of the figure goes into the property index, enclosed in square brackets after @figure. The parent of the figure must already exist. For example, when defining foo.bar.baz, both foo and foo.bar must have already been defined in the NED file.
The type and various attributes of the figure are specified in the property body as key-value pairs. For example, type=line creates a cLineFigure, type=rectangle creates a cRectangleFigure, type=text creates a cTextFigure, and so on. The list of accepted types is provided in appendix [26]. Additional attributes correspond to getters and setters of the C++ class denoted by the type attribute.
The following example creates a green rectangle and the text "placeholder" inside it in NED. The subsequent C++ code changes the text to "Hello World!".
NED part:
module Foo
{
@display("bgb=800,500");
@figure[box](type=rectangle; coords=10,50; size=200,100; fillColor=green);
@figure[box.label](type=text; coords=20,80; text=placeholder);
}
And the corresponding C++ code:
// We assume this code runs in a submodule of the "Foo" module.
cCanvas *canvas = getParentModule()->getCanvas();
// Obtain the figure pointer by hierarchical name and change the text.
cFigure *figure = canvas->getFigureByPath("box.label");
cTextFigure *textFigure = check_and_cast<cTextFigure *>(figure);
textFigure->setText("Hello World!");
8.6.6 Stacking Order¶
The stacking order (also known as Z-order) of figures is determined jointly by the child order and the cFigure attribute called Z-index, with the latter taking priority. The Z-index is not used directly, but instead an effective Z-index is computed as the sum of the Z-index values of the figure and all its ancestors up to the root figure.
A figure with a larger effective Z-index will be displayed above figures with smaller effective Z-indices, regardless of their positions in the figure tree. Among figures with equal effective Z-indices, the child order determines the stacking order. If two such figures are siblings, the one that occurs later in the child list will be drawn above the other. For figures that are not siblings, the child order within the first common ancestor matters.
These design decisions, where the effective Z-index is computed as the sum up to the root and affects the order among all figures (not just siblings), result in significant flexibility. The Z-order of figures is no longer constrained by the order of the figure tree.
There are several methods for managing the stacking order of figures, including setZIndex() to set the Z-index of a figure, getZIndex() to get the Z-index of a figure, getEffectiveZIndex() to get the effective Z-index of a figure, insertAbove() and insertBelow() to insert a figure above or below another figure, isAbove() and isBelow() to check if a figure is above or below another figure, and raiseAbove(), lowerBelow(), raiseToTop(), and lowerToBottom() to raise or lower a figure in the stack.
8.6.7 Transforms¶
One of the most powerful features of the Canvas API is the ability to apply geometric transformations to figures. OMNeT++ uses 2D homogeneous transformation matrices, which can express affine transforms such as translation, scaling, rotation, and skew (shearing). The transformation matrix used by OMNeT++ has the following format:
| a | c | t1 |
| b | d | t2 |
| 0 | 0 | 1 |
In a nutshell, given a point with its (x, y) coodinates, one can obtain the transformed version of it by multiplying the transformation matrix by the (x \ y \ 1) column vector (a.k.a. homogeneous coordinates), and dropping the third component:
| x' |
| y' |
| 1 |
| a | c | t1 |
| b | d | t2 |
| 0 | 0 | 1 |
| x |
| y |
| 1 |
Given a point with coordinates (x, y), the transformed version of the point can be obtained by multiplying the transformation matrix by the column vector (x, y, 1) (referred to as homogeneous coordinates) and dropping the third component. The result is (ax + cy + t1, bx + dy + t2). The coefficients a, b, c, d control rotation, scaling, and skew, while t1 and t2 control translation. Transforming a point by matrix T1 and then by T2 is equivalent to transforming the point by the matrix T2 T1 due to the associativity of matrix multiplication.
8.6.7.1 The Transform Class¶
The cFigure::Transform class represents transformation matrices in OMNeT++.
A cFigure::Transform matrix can be initialized using various methods. One way is to assign values directly to the a, b, c, d, t1, and t2 members. Another way is to use the six-argument constructor. It is also possible to start from the identity transform (created by the default constructor) and apply transformations using the scale(), rotate(), skewx(), skewy(), and translate() member functions. These functions update the matrix to reflect the specified transformation, as if the matrix was left-multiplied by a temporary matrix that represents the transformation.
To transform a point, represented by the cFigure::Point class, one can use the applyTo() method of cFigure::Transform. The following code demonstrates this:
// Allow Transform and Point to be referenced without the cFigure:: prefix typedef cFigure::Transform Transform; typedef cFigure::Point Point; // Create a matrix that scales by 2, rotates by 45 degrees, and translates by (100,0) Transform t = Transform().scale(2.0).rotate(M_PI/4).translate(100,0); // Apply the transform to the point (10, 20) Point p(10, 20); Point p2 = t.applyTo(p);
8.6.7.2 Figure Transforms¶
Every figure has an associated transformation matrix, which affects how the figure and its figure subtree are displayed. In other words, the way a figure displayed is affected by its own transformation matrix and the transformation matrices of all of its ancestors, up to the root figure of the canvas. The effective transform will be the product of those transformation matrices.
A figure's transformation matrix is directly accessible via cFigure's getTransform(), setTransform() member functions. For convenience, cFigure also has several scale(), rotate(), skewx(), skewy() and translate() member functions, which directly operate on the internal transformation matrix.
Some figures have visual aspects that are not, or only optionally affected by the transform. For example, the size and orientation of the text displayed by cLabelFigure, in contrast to that of cTextFigure, is unaffected by transforms (and of manual zoom as well). Only the position is transformed.
8.6.7.3 Transform vs move()¶
In addition to the translate(), scale(), rotate(), etc. functions that update the figure's transformation matrix, figures also have a move() method. move(), like translate(), also moves the figure by a dx, dy offset. However, move() works by changing the figure's coordinates, and not by changing the transformation matrix.
Since every figure class stores and interprets its position differently, move() is defined for each figure class independently. For example, cPolylineFigure's move() changes the coordinates of each point.
move() is recursive, that is, it not only moves the figure on which it was called, but also its children. There is also a non-recursive variant, called moveLocal().
8.6.8 Showing/Hiding Figures¶
8.6.8.1 Visibility Flag¶
Figures have a visibility flag that controls whether the figure is displayed. Hiding a figure via the flag will also hide its subtree. The flag can be accessed using the isVisible() and setVisible() member functions of cFigure.
8.6.8.2 Tags¶
Figures can also be assigned one or more tags, which are textual identifiers. Tags do not directly affect rendering, but GUIs that display canvas content, such as Qtenv, provide functionality to show/hide figures based on the tags they contain. By using figure filters, users can conditionally display figures based on their tags.
Tag-based filtering and the visibility flag are in AND relationship -- figures hidden via setVisible(false) cannot be displayed using tags. Also, hiding a figure using the tag filter hides its figure subtree as well.
Tags can be assigned to figures using the setTags() method, which takes a single string of space-separated tags (tags may not contain spaces). The methods getTags() and setTags() can be used to access and modify the tag list.
Tags functionality, when used carefully, allows one to define "layers" that can be turned on/off from Qtenv.
8.6.9 Figure Tooltip, Associated Object¶
8.6.9.1 Tooltip¶
Figures can be assigned a tooltip text using the setTooltip() method. The tooltip is shown in the runtime GUI when the user hovers over the figure with the mouse.
8.6.9.2 Associated Object¶
In many simulations, certain figures correspond to objects in the simulation model. For example, a truck image may represent a module that represents a mobile node in the simulation. To associate a figure with its corresponding object, the object can be set using the setAssociatedObject() method. The GUI can use this information to provide shortcuts to the associated object, such as selecting the object in an inspector when the user clicks the figure, or displaying the object's tooltip over the figure if it does not have its own tooltip.
- CAUTION
The object must exist (i.e. must not be deleted) while it is associated with the figure. When the object is deleted, the user is responsible for letting the figure forget the pointer, e.g. by a setAssociatedObject(nullptr) call.
8.6.10 Specifying Positions, Colors, Fonts and Other Properties¶
8.6.10.1 Points¶
Points are represented by the cFigure::Point struct:
struct Point {
double x, y;
...
};
In addition to the public x, y members and a two-argument constructor for convenient initialization, the struct provides overloaded operators (+,-,*,/) and some utility functions like translate(), distanceTo() and str().
8.6.10.2 Rectangles¶
Rectangles are represented by the cFigure::Rectangle struct:
struct Rectangle {
double x, y,
double width, height;
...
};
A rectangle is specified with the coordinates of their top-left corner, their width and height. The latter two are expected to be nonnegative. In addition to the public x, y, width, height members and a four-argument constructor for convenient initialization, the struct also has utility functions like getCenter(), getSize(), translate() and str().
8.6.10.3 Colors¶
Colors are represented by the cFigure::Color struct as 24-bit RGB colors:
struct Color {
uint8_t red, green, blue;
...
};
In addition to the public red, green, blue members and a three-argument constructor for convenient initialization, the struct also has a string-based constructor and str() function. The string form accepts various notations: HTML colors (#rrggbb), HSB colors in a similar notation (@hhssbb), and English color names (SVG and X11 color names, to be more precise.)
However, one doesn't need to use Color directly. There are also predefined constants for the basic colors (BLACK, WHITE, GREY, RED, GREEN, BLUE, YELLOW, CYAN, MAGENTA), as well as a collection of carefully chosen dark and light colors, suitable for e.g. chart drawing, in the arrays GOOD_DARK_COLORS[] and GOOD_LIGHT_COLORS[]; for convenience, the number of colors in each are in the NUM_GOOD_DARK_COLORS and NUM_GOOD_LIGHT_COLORS constants).
The following ways of specifying colors are all valid:
cFigure::BLACK;
cFigure::Color("steelblue");
cFigure::Color("#3d7a8f");
cFigure::Color("@20ff80");
cFigure::GOOD_DARK_COLORS[2];
cFigure::GOOD_LIGHT_COLORS[intrand(NUM_GOOD_LIGHT_COLORS)];
8.6.10.4 Fonts¶
The requested font for text figures is represented by the cFigure::Font struct. It stores the typeface, font style and font size in one.
struct Font {
std::string typeface;
int pointSize;
uint8_t style;
...
};
The font does not need to be fully specified, there are some defaults. When typeface is set to the empty string or when pointSize is zero or a negative value, that means that the default font or the default size should be used, respectively.
The style field can be either FONT_NONE, or the binary OR of the following constants: FONT_BOLD, FONT_ITALIC, FONT_UNDERLINE.
The struct also has a three-argument constructor for convenient initialization, and an str() function that returns a human-readable text representation of the contents.
Some examples:
cFigure::Font("Arial"); // default size, normal
cFigure::Font("Arial", 12); // 12pt, normal
cFigure::Font("Arial", 12, cFigure::FONT_BOLD | cFigure::FONT_ITALIC);
8.6.10.5 Other Line and Shape Properties¶
cFigure also contains a number of enums as inner types to describe various line, shape, text and image properties. Here they are:
LineStyle
Values: LINE_SOLID, LINE_DOTTED, LINE_DASHED
This enum (cFigure::LineStyle) is used by line and shape figures to determine their line/border style. The precise graphical interpretation, e.g. dash lengths for the dashed style, depends on the graphics library that the GUI was implemented with.
CapStyle
Values: CAP_BUTT, CAP_ROUND, CAP_SQUARE
This enum is used by line and path figures, and it indicates the shape to be used at the end of the lines or open subpaths.

JoinStyle
Values: JOIN_BEVEL, JOIN_ROUND, JOIN_MITER
This enum indicates the shape to be used when two line segments are joined, in line or shape figures.

FillRule
Values: FILL_EVENODD, FILL_NONZERO.
This enum determines which regions of a self-intersecting shape should be considered to be inside the shape, and thus be filled.
Arrowhead
Values: ARROW_NONE, ARROW_SIMPLE, ARROW_TRIANGLE, ARROW_BARBED.
Some figures support displaying arrowheads at one or both ends of a line. This enum determines the style of the arrowhead to be used.

Interpolation
Values: INTERPOLATION_NONE, INTERPOLATION_FAST, INTERPOLATION_BEST.
Interpolation is used for rendering an image when it is not displayed at its native resolution. This enum indicates the algorithm to be used for interpolation.
The mode none selects the "nearest neighbor" algorithm. Fast emphasizes speed, and best emphasizes quality; however, the exact choice of algorithm (bilinear, bicubic, quadratic, etc.) depends on features of the graphics library that the GUI was implemented with.
Anchor
Values:
ANCHOR_CENTER, ANCHOR_N, ANCHOR_E, ANCHOR_S, ANCHOR_W,
ANCHOR_NW, ANCHOR_NE, ANCHOR_SE, ANCHOR_SW;
ANCHOR_BASELINE_START, ANCHOR_BASELINE_MIDDLE,
ANCHOR_BASELINE_END.
Some figures like text and image figures are placed by specifying a single point (position) plus an anchor mode, a value from this enum. The anchor mode indicates which point of the bounding box of the figure should be positioned over the specified point. For example, when using ANCHOR_N, the figure is placed so that its top-middle point falls at the specified point.
The last three, baseline constants are only used with text figures, and indicate that the start, middle or end of the text's baseline is the anchor point.
8.6.11 Primitive Figures¶
Now that we know all about figures in general, we can look into the specific figure classes provided by OMNeT++.
8.6.11.1 cAbstractLineFigure¶
cAbstractLineFigure is the common base class for various line figures, providing line color, style, width, opacity, arrowhead and other properties for them.
Line color can be set with setLineColor(), and line width with setLineWidth(). Lines can be solid, dashed, dotted, etc.; line style can be set with setLineStyle(). The default line color is black.
Lines can be partially transparent. This property can be controlled with setLineOpacity() that takes a double between 0 and 1: a zero argument means fully transparent, and one means fully opaque.
Lines can have various cap styles: butt, square, round, etc., which can be selected with setCapStyle(). Join style, which is a related property, is not part of cAbstractLineFigure but instead added to specific subclasses where it makes sense.
Lines may also be augmented with arrowheads at either or both ends. Arrowheads can be selected with setStartArrowhead() and setEndArrowhead().
Transformations such as scaling or skew do affect the width of the line as it is rendered on the canvas. Whether zooming (by the user) should also affect it can be controlled by setting a flag (setZoomLineWidth()). The default is non-zooming lines.
Specifying zero for line width is currently not allowed. To hide the line,
use setVisible(false).
- [It would make sense to display
zero-width lines as hairlines that are always rendered as one pixel wide
regardless of transforms and zoom level, but that is not possible on all
platforms.]
8.6.11.2 cLineFigure¶
cLineFigure displays a single straight line segment. The endpoints of the line can be set with the setStart()/setEnd() methods. Other properties such as color and line style are inherited from cAbstractLineFigure.
An example that draws an arrow from (0,0) to (100,100):
cLineFigure *line = new cLineFigure("line");
line->setStart(cFigure::Point(0,0));
line->setEnd(cFigure::Point(100,50));
line->setLineWidth(2);
line->setEndArrowhead(cFigure::ARROW_BARBED);
The result:

8.6.11.3 cArcFigure¶
cArcFigure displays an axis-aligned arc. (To display a non-axis-aligned arc, apply a transform to cArcFigure, or use cPathFigure.) The arc's geometry is determined by the bounding box of the circle or ellipse, and a start and end angle; they can be set with the setBounds(), setStartAngle() and setEndAngle() methods. Other properties such as color and line style are inherited from cAbstractLineFigure.
For angles, zero points east. Angles that go counterclockwise are positive, and those that go clockwise are negative.
- NOTE
Angles are in radians in the C++ API, but in degrees when the figure is defined in the NED file via @figure.
Here is an example that draws a blue arc with an arrowhead that goes counter-clockwise from 3 hours to 12 hours on the clock:
cArcFigure *arc = new cArcFigure("arc");
arc->setBounds(cFigure::Rectangle(10,10,100,100));
arc->setStartAngle(0);
arc->setEndAngle(M_PI/2);
arc->setLineColor(cFigure::BLUE);
arc->setEndArrowhead(cFigure::ARROW_BARBED);
The result:

8.6.11.4 cPolylineFigure¶
By default, cPolylineFigure displays multiple connecting straight line segments. The class stores geometry information as a sequence of points. The line may be smoothed, so the figure can also display complex curves.
The points can be set with setPoints() that takes std::vector<Point>, or added one-by-one using addPoint(). Elements in the point list can be read and overwritten (getPoint(), setPoint()). One can also insert and remove points (insertPoint() and removePoint().
A smoothed line is drawn as a series of Bezier curves, which touch the start point of the first line segment, the end point of the last line segment, and the midpoints of intermediate line segments, while intermediate points serve as control points. Smoothing can be turned on/off using setSmooth().
Additional properties such as color and line style are inherited from cAbstractLineFigure. Line join style (which is not part of cAbstractLineFigure) can be set with setJoinStyle().
Here is an example that uses a smoothed polyline to draw a spiral:
cPolylineFigure *polyline = new cPolylineFigure("polyline");
const double C = 1.1;
for (int i = 0; i < 10; i++)
polyline->addPoint(cFigure::Point(5*i*cos(C*i), 5*i*sin(C*i)));
polyline->move(100, 100);
polyline->setSmooth(true);
The result, with both smooth=false and smooth=true:

8.6.11.5 cAbstractShapeFigure¶
cAbstractShapeFigure is an abstract base class for various shapes, providing line and fill color, line and fill opacity, line style, line width, and other properties for them.
Both outline and fill are optional, they can be turned on and off independently with the setOutlined() and setFilled() methods. The default is outlined but unfilled shapes.
Similar to cAbstractLineFigure, line color can be set with setLineColor(), and line width with setLineWidth(). Lines can be solid, dashed, dotted, etc.; line style can be set with setLineStyle(). The default line color is black.
Fill color can be set with setFillColor(). The default fill color is blue (although it is indifferent until one calls setFilled(true)).
- NOTE
Invoking setFillColor() alone does not make the shape filled, one also needs to call setFilled(true) for that.
Shapes can be partially transparent, and opacity can be set individually for the outline and the fill, using setLineOpacity() and setFillOpacity(). These functions accept a double between 0 and 1: a zero argument means fully transparent, and one means fully opaque.
When the outline is drawn with a width larger than one pixel, it will be drawn symmetrically, i.e. approximately 50-50% of its width will fall inside and outside the shape. (This also means that the fill and a wide outline will partially overlap, but that is only apparent if the outline is also partially transparent.)
Transformations such as scaling or skew do affect the width of the line as it is rendered on the canvas. Whether zooming (by the user) should also affect it can be controlled by setting a flag (setZoomLineWidth()). The default is non-zooming lines.
Specifying zero for line width is currently not allowed. To hide the outline, setOutlined(false) can be used.
8.6.11.6 cRectangleFigure¶
cRectangleFigure displays an axis-aligned rectangle with optionally rounded corners. As with all shape figures, drawing of both the outline and the fill are optional. Line and fill color, and several other properties are inherited from cAbstractShapeFigure.
The figure's geometry can be set with the setBounds() method that takes a cFigure::Rectangle. The radii for the rounded corners can be set independently for the x and y direction using setCornerRx() and setCornerRy(), or together with setCornerRadius().
The following example draws a rounded rectangle of size 160x100, filled with a "good dark color".
cRectangleFigure *rect = new cRectangleFigure("rect");
rect->setBounds(cFigure::Rectangle(100,100,160,100));
rect->setCornerRadius(5);
rect->setFilled(true);
rect->setFillColor(cFigure::GOOD_LIGHT_COLORS[0]);
The result:

8.6.11.7 cOvalFigure¶
cOvalFigure displays a circle or an axis-aligned ellipse. As with all shape figures, drawing of both the outline and the fill are optional. Line and fill color, and several other properties are inherited from cAbstractShapeFigure.
The geometry is specified with the bounding box, and it can be set with the setBounds() method that takes a cFigure::Rectangle.
The following example draws a circle of diameter 120 with a wide dotted line.
cOvalFigure *circle = new cOvalFigure("circle");
circle->setBounds(cFigure::Rectangle(100,100,120,120));
circle->setLineWidth(2);
circle->setLineStyle(cFigure::LINE_DOTTED);
The result:

8.6.11.8 cRingFigure¶
cRingFigure displays a ring, with explicitly controllable inner/outer radii. The inner and outer circles (or ellipses) form the outline, and the area between them is filled. As with all shape figures, drawing of both the outline and the fill are optional. Line and fill color, and several other properties are inherited from cAbstractShapeFigure.
The geometry is determined by the bounding box that defines the outer circle, and the x and y radii of the inner oval. They can be set with the setBounds(), setInnerRx() and setInnerRy() member functions. There is also a utility method for setting both inner radii together, named setInnerRadius().
The following example draws a ring with an outer diameter of 50 and inner diameter of 20.
cRingFigure *ring = new cRingFigure("ring");
ring->setBounds(cFigure::Rectangle(100,100,50,50));
ring->setInnerRadius(10);
ring->setFilled(true);
ring->setFillColor(cFigure::YELLOW);

8.6.11.9 cPieSliceFigure¶
cPieSliceFigure displays a pie slice, that is, a section of an axis-aligned disc or filled ellipse. The outline of the pie slice consists of an arc and two radii. As with all shape figures, drawing of both the outline and the fill are optional.
Similar to an arc, a pie slice is determined by the bounding box of the full disc or ellipse, and a start and an end angle. They can be set with the setBounds(), setStartAngle() and setEndAngle() methods.
For angles, zero points east. Angles that go counterclockwise are positive, and those that go clockwise are negative.
- NOTE
Angles are in radians in the C++ API, but in degrees when the figure is defined in the NED file via @figure.
Line and fill color, and several other properties are inherited from cAbstractShapeFigure.
The following example draws pie slice that's one third of a whole pie:
cPieSliceFigure *pieslice = new cPieSliceFigure("pieslice");
pieslice->setBounds(cFigure::Rectangle(100,100,100,100));
pieslice->setStartAngle(0);
pieslice->setEndAngle(2*M_PI/3);
pieslice->setFilled(true);
pieslice->setLineColor(cFigure::BLUE);
pieslice->setFillColor(cFigure::YELLOW);
The result:

8.6.11.10 cPolygonFigure¶
The cPolygonFigure displays a closed polygon, which is determined by a sequence of points. The polygon can be smoothed. A smoothed polygon is drawn as a series of cubic Bezier curves, where the curves touch the midpoints of the sides, and the vertices serve as control points. Smoothing can be turned on/off using the setSmooth() method.
The points can be set using the setPoints() method, which takes a std::vector<Point>, or added one-by-one using the addPoint() method. Elements in the point list can be read and overwritten using the getPoint() and setPoint() methods. One can also insert and remove points using the insertPoint() and removePoint() methods.
Like all shape figures, the outline and the fill of the polygon can be optionally drawn. The drawing of filled self-intersecting polygons is controlled by the fill rule, which defaults to even-odd (FILL_EVENODD), and can be set using the setFillRule() method. The line join style can be set using the setJoinStyle() method.
Line and fill color, and several other properties are inherited from the cAbstractShapeFigure.
Here is an example of a smoothed polygon that also demonstrates the use of the setPoints() method:
cPolygonFigure *polygon = new cPolygonFigure("polygon");
std::vector<cFigure::Point> points;
points.push_back(cFigure::Point(0, 100));
points.push_back(cFigure::Point(50, 100));
points.push_back(cFigure::Point(100, 100));
points.push_back(cFigure::Point(50, 50));
polygon->setPoints(points);
polygon->setLineColor(cFigure::BLUE);
polygon->setLineWidth(3);
polygon->setSmooth(true);
The result, with both smooth=false and smooth=true:

8.6.11.11 cPathFigure¶
The cPathFigure displays a “path”, which is a complex shape or line modeled after SVG paths. A path may consist of any number of straight line segments, Bezier curves, and arcs. The path can be disjoint as well. Closed paths may be filled. The drawing of filled self-intersecting polygons is controlled by the fill rule property. Line and fill color, and several other properties are inherited from cAbstractShapeFigure.
A path, when given as a string, looks like this one that draws a triangle:
M 150 0 L 75 200 L 225 200 Z
It consists of a sequence of commands (M for moveto, L for lineto, etc.) that are each followed by numeric parameters (except Z). All commands can be expressed with lowercase letters, too. A capital letter means that the target point is given with absolute coordinates, while a lowercase letter means they are given relative to the target point of the previous command.
The cPathFigure can accept the path in string form (setPath()), or one can assemble the path with a series of method calls like addMoveTo(). The path can be cleared with the clearPath() method.
The commands with argument lists and the corresponding add methods are:
- M x y: move; addMoveTo(), addMoveRel()
- L x y: line; addLineTo(), addLineRel()
- H x: horizontal line; addHorizontalLineTo(), addHorizontalLineRel()
- V y: vertical line; addVerticalLineTo(), addVerticalLineRel()
- A rx ry phi largeArc sweep x y: arc; addArcTo(), addArcRel()
- Q x1 y1 x y: curve; addCurveTo(), addCurveRel()
- T x y: smooth curve; addSmoothCurveTo(), addSmoothCurveRel()
- C x1 y1 x2 y2 x y: cubic Bezier curve; addCubicBezierCurveTo(), addCubicBezierCurveRel()
- S x1 y1 x y: smooth cubic Bezier curve; addSmoothCubicBezierCurveTo(), addSmoothCubicBezierCurveRel()
- Z: close path; addClosePath()
In the parameter lists, (x,y) are the target points (substitute (dx,dy) for
the lowercase, relative versions.) For the Bezier curves, x1,y1 and
(x2,y2) are the control points. For the arc, rx and ry are the radii of the
ellipse, phi is a rotation angle in degrees for the ellipse, and
largeArc and sweep are both booleans (0 or 1) that select which portion
of the ellipse should be taken.
- [For more details, consult the SVG
specification.]
No matter how the path was created, the string form can be obtained with the getPath() method, and the parsed form with the getNumPathItems(), and getPathItem(k) methods. The latter returns a pointer to a cPathFigure::PathItem, which is a base class with subclasses for every item type.
The line join style, cap style (for open subpaths), and fill rule (for closed subpaths) can be set with the setJoinStyle(), setCapStyle(), and setFillRule() methods.
The cPathFigure has one more property, an (dx,dy) offset, which exists to simplify the implementation of the move() method. The offset causes the figure to be translated by the given amount for drawing. For other figure types, move() directly updates the coordinates, so it is effectively a wrapper for setPosition() or setBounds(). For path figures, implementing move() so that it updates every path item would be cumbersome and potentially also confusing for users. Instead, move() updates the offset. The offset can be set with setOffset().
In the first example, the path is given as a string:
cPathFigure *path = new cPathFigure("path");
path->setPath("M 0 150 L 50 50 Q 20 120 100 150 Z");
path->setFilled(true);
path->setLineColor(cFigure::BLUE);
path->setFillColor(cFigure::YELLOW);
The second example creates the equivalent path programmatically.
cPathFigure *path2 = new cPathFigure("path");
path2->addMoveTo(0,150);
path2->addLineTo(50,50);
path2->addCurveTo(20,120,100,150);
path2->addClosePath();
path2->setFilled(true);
path2->setLineColor(cFigure::BLUE);
path2->setFillColor(cFigure::YELLOW);
The result:

8.6.11.12 cAbstractTextFigure¶
The cAbstractTextFigure is an abstract base class for figures that display potentially multi-line text.
The location of the text on the canvas is determined jointly by a position and an anchor. The anchor tells how to place the text relative to the positioning point. For example, if the anchor is ANCHOR_CENTER, then the text is centered on the point; if the anchor is ANCHOR_N, then the text will be drawn so that its top center point is at the positioning point. The values ANCHOR_BASELINE_START, ANCHOR_BASELINE_MIDDLE, ANCHOR_BASELINE_END refer to the beginning, middle, and end of the baseline of the first line of the text as an anchor point. The member functions to set the positioning point and the anchor are setPosition() and setAnchor(). The anchor defaults to ANCHOR_CENTER.
The font can be set with the setFont() member function, which takes cFigure::Font, a class that encapsulates typeface, font style, and size. The color can be set with setColor(). The displayed text can also be partially transparent. This is controlled with the setOpacity() member function, which accepts a double in the range of [0,1], where 0 means fully transparent (invisible), and 1 means fully opaque.
It is also possible to have a partially transparent “halo” displayed around the text. The halo improves readability when the text is displayed over a background that has a similar color to the text or when it overlaps with other text items. The halo can be turned on with setHalo().
8.6.11.13 cTextFigure¶
The cTextFigure displays text which is affected by zooming and transformations. The font, color, position, anchoring, and other properties are inherited from cAbstractTextFigure.
The following example displays a text in dark blue with a font size of 12 points in bold Arial font.
cTextFigure *text = new cTextFigure("text");
text->setText("This is some text.");
text->setPosition(cFigure::Point(100,100));
text->setAnchor(cFigure::ANCHOR_BASELINE_MIDDLE);
text->setColor(cFigure::Color("#000040"));
text->setFont(cFigure::Font("Arial", 12, cFigure::FONT_BOLD));
The result:

8.6.11.14 cLabelFigure¶
The cLabelFigure displays text that is unaffected by zooming or transformations, except its position. The font, color, position, anchoring, and other properties are inherited from cAbstractTextFigure. The angle of the label can be set with the setAngle() method. A zero angle means horizontal (unrotated) text. Positive values rotate the text counterclockwise, while negative values rotate the text clockwise.
- NOTE
Angles are in radians in the C++ API but in degrees when the figure is defined in the NED file via @figure.
The following example displays a label in Courier New with the default size, slightly transparent.
cLabelFigure *label = new cLabelFigure("label");
label->setText("This is a label.");
label->setPosition(cFigure::Point(100,100));
label->setAnchor(cFigure::ANCHOR_NW);
label->setFont(cFigure::Font("Courier New"));
label->setOpacity(0.9);
The result:

8.6.11.15 cAbstractImageFigure¶
The cAbstractImageFigure is an abstract base class for image figures.
The location of the image on the canvas is determined jointly by a position and an anchor. The anchor tells how to place the image relative to the positioning point. For example, if the anchor is ANCHOR_CENTER, the image is centered on the point; if the anchor is ANCHOR_N, the image will be drawn so that its top center point is at the positioning point. The member functions to set the positioning point and the anchor are setPosition() and setAnchor(). The anchor defaults to ANCHOR_CENTER.
By default, the figure's width and height will be taken from the image's dimensions in pixels. This can be overridden with the setWidth() and setHeight() methods, causing the image to be scaled. Using setWidth(0) or setHeight(0) will reset the default (automatic) width and height.
One can choose from several interpolation modes that control how the image is rendered when it is not drawn in its natural size. The interpolation mode can be set with the setInterpolation() method, which defaults to INTERPOLATION_FAST.
Images can be tinted; this feature is controlled by a tint color and a tint amount, which is a real number in the range of [0,1]. They can be set with the setTintColor() and setTintAmount() methods, respectively.
Images may also be partially transparent, which is controlled by the opacity property, which is also a real number in the range of [0,1]. Opacity can be set with the setOpacity() method. The rendering process will combine this property with the transparency information contained within the image, i.e. the alpha channel.
8.6.11.16 cImageFigure¶
The cImageFigure displays an image, typically an icon or a background image, loaded from the OMNeT++ image path. Positioning and other properties are inherited from cAbstractImageFigure. Unlike cIconFigure, the cImageFigure fully obeys transforms and zoom.
The following example displays a map:
cImageFigure *image = new cImageFigure("map");
image->setPosition(cFigure::Point(0,0));
image->setAnchor(cFigure::ANCHOR_NW);
image->setImageName("maps/europe");
image->setWidth(600);
image->setHeight(500);
8.6.11.17 cIconFigure¶
The cIconFigure displays a non-zooming image, loaded from the OMNeT++ image path. Positioning and other properties are inherited from cAbstractImageFigure.
The cIconFigure is not affected by transforms or zoom, except its position. It can still be resized, though, via the setWidth() and setHeight() methods.
The following example displays an icon similar to the way the "i=block/sink,gold,30" display string tag would, and makes it slightly transparent:
cIconFigure *icon = new cIconFigure("icon");
icon->setPosition(cFigure::Point(100,100));
icon->setImageName("block/sink");
icon->setTintColor(cFigure::Color("gold"));
icon->setTintAmount(0.6);
icon->setOpacity(0.8);
The result:
8.6.11.18 cPixmapFigure¶
The cPixmapFigure displays a user-defined raster image. A pixmap figure may be used to display e.g. a heat map. Support for scaling and various interpolation modes are useful here. Positioning and other properties are inherited from cAbstractImageFigure.
A pixmap itself is represented by the cFigure::Pixmap class.
The cFigure::Pixmap stores a rectangular array of 32-bit RGBA pixels, and allows pixels to be manipulated directly. The size ($width x height$) as well as the default fill can be specified in the constructor. The pixmap can be resized (i.e. pixels added/removed at the right and/or bottom) using setSize(), and it can be filled with a color using fill(). Pixels can be directly accessed using pixel(x,y).
A pixel is returned as type cFigure::RGBA, which is a convenience struct that, in addition to having the four public uint8_t fields (red, green, blue, alpha), is augmented with several utility methods.
Many Pixmap and RGBA methods accept or return cFigure::Color and opacity, converting between them and RGBA. (Opacity is a [0,1] real number that is mapped to the 0..255 alpha channel. 0 means fully transparent, and 1 means fully opaque.)
One can set up and manipulate the image that cPixmapFigure displays in two ways. First, one can create and fill a cFigure::Pixmap separately, and set it on cPixmapFigure using setPixmap(). This will overwrite the figure's internal pixmap instance that it displays. The second way is to utilize cPixmapFigure's methods such as setPixmapSize(), fill(), setPixel(), setPixelColor(), setPixelOpacity(), etc. that delegate to the internal pixmap instance.
The following example displays a small heat map by manipulating the transparency of the pixels. The 9-by-9 pixel image is stretched to 100 units each direction on the screen.
cPixmapFigure *pixmapFigure = new cPixmapFigure("pixmap");
pixmapFigure->setPosition(cFigure::Point(100,100));
pixmapFigure->setSize(100, 100);
pixmapFigure->setPixmapSize(9, 9, cFigure::BLUE, 1);
for (int y = 0; y < pixmapFigure->getPixmapHeight(); y++) {
for (int x = 0; x < pixmapFigure->getPixmapWidth(); x++) {
double opacity = 1 - sqrt((x-4)*(x-4) + (y-4)*(y-4))/4;
if (opacity < 0) opacity = 0;
pixmapFigure->setPixelOpacity(x, y, opacity);
}
}
pixmapFigure->setInterpolation(cFigure::INTERPOLATION_FAST);
The result, both with interpolation=NONE and interpolation=FAST:
8.6.11.19 cGroupFigure¶
The cGroupFigure is for the sole purpose of grouping its children. It has no visual appearance. The usefulness of a group figure comes from the fact that elements of a group can be hidden or shown together, and also transformations are inherited from parent to child. Thus, children of a group can be moved, scaled, rotated, etc. together by updating the group's transformation matrix.
The following example creates a group with two subfigures, then moves and rotates them as one unit.
cGroupFigure *group = new cGroupFigure("group");
cRectangleFigure *rect = new cRectangleFigure("rect");
rect->setBounds(cFigure::Rectangle(-50,0,100,40));
rect->setCornerRadius(5);
rect->setFilled(true);
rect->setFillColor(cFigure::YELLOW);
cLineFigure *line = new cLineFigure("line");
line->setStart(cFigure::Point(-80,50));
line->setEnd(cFigure::Point(80,50));
line->setLineWidth(3);
group->addFigure(rect);
group->addFigure(line);
group->translate(100, 100);
group->rotate(M_PI/6, 100, 100);
The result:

8.6.11.20 cPanelFigure¶
The cPanelFigure is similar to cGroupFigure in that it is also intended for grouping its children and has no visual appearance of its own. However, it has a special behavior regarding transformations and especially zooming.
The cPanelFigure sets up an axis-aligned, unscaled coordinate system for its children, canceling the effect of any transformation (scaling, rotation, etc.) inherited from ancestor figures. This allows for pixel-based positioning of children and makes them immune to zooming.
Unlike cGroupFigure, which has its own position attribute, cPanelFigure uses two points for positioning, a position and an anchor point. The position is interpreted in the coordinate system of the panel figure's parent, while the anchor point is interpreted in the coordinate system of the panel figure itself. To place the panel figure on the canvas, the panel's anchor point is mapped to the position in the parent.
Setting a transformation on the panel figure itself allows for rotation, scaling, and skewing of its children. The anchor point is also affected by this transformation.
The following example demonstrates the cPanelFigure behavior. It creates a normal group figure as the parent for the panel and sets up a skewed coordinate system on it. A reference image is also added to it, to make the effect of skew visible. The panel figure is also added to it as a child. The panel contains an image (showing the same icon as the reference image) and a border around it.
cGroupFigure *layer = new cGroupFigure("parent");
layer->skewx(-0.3);
cImageFigure *referenceImg = new cImageFigure("ref");
referenceImg->setImageName("block/broadcast");
referenceImg->setPosition(cFigure::Point(200,200));
referenceImg->setOpacity(0.3);
layer->addFigure(referenceImg);
cPanelFigure *panel = new cPanelFigure("panel");
cImageFigure *img = new cImageFigure("img");
img->setImageName("block/broadcast");
img->setPosition(cFigure::Point(0,0));
panel->addFigure(img);
cRectangleFigure *border = new cRectangleFigure("border");
border->setBounds(cFigure::Rectangle(-25,-25,50,50));
border->setLineWidth(3);
panel->addFigure(border);
layer->addFigure(panel);
panel->setAnchorPoint(cFigure::Point(0,0));
panel->setPosition(cFigure::Point(210,200));
The screenshot shows the result at an approximate 4x zoom level. The large semi-transparent image is the reference image, and the smaller one is the image within the panel figure. Note that neither the skew nor the zoom has affected the panel figure's children.

8.6.12 Compound Figures¶
Any graphics can be built using primitive (i.e., elementary) figures alone. However, when the graphical presentation of a simulation grows complex, it is often convenient to be able to group certain figures and treat them as a single unit. For example, although a bar chart can be displayed using several independent rectangles, lines, and text items, there are clear benefits to being able to handle them together as a single bar chart object.
Compound figures are cFigure subclasses that are made up of several figures themselves, but can be instantiated and manipulated as a single figure. Compound figure classes can be used from C++ code like normal figures, and can also be instantiated from @figure properties.
Compound figure classes usually subclass from cGroupFigure. The class would typically maintain pointers to its subfigures in class members and have methods (getters, setters, etc.) that operate on the subfigures.
To enable the new C++ class to be used with @figure, it needs to be registered using the Register_Figure() macro. The macro takes two arguments: the type name by which the figure is known to @figure (the string to be used with the type property key), and the C++ class name. For example, if you want to instantiate a class named FooFigure with @figure[...](type=foo;...), you need to add the following line to the C++ source:
Register_Figure("foo", FooFigure);
If the figure should be able to take values from @figure properties, the class needs to override the parse(cProperty*) method, and possibly also getAllowedPropertyKeys(). We recommend examining the code of the figure classes built into OMNeT++ for implementation hints.
8.6.13 Self-Refreshing Figures¶
Most figures are entirely passive objects. When they need to be moved or updated during the course of the simulation, there must be an active component in the simulation that does it for them. Usually, it is the refreshDisplay() method of some simple module (or modules) that contain the code that updates various properties of the figures.
However, certain figures can benefit from being able to refresh themselves during the simulation. For example, consider a compound figure (see previous section) that displays a line chart, which is continually updated with new data as the simulation progresses. The LineChartFigure class may contain an addDataPoint(x,y) method, which is called from other parts of the simulation to add new data to the chart. The question is when to update the subfigures that make up the chart: the lines, axis ticks and labels, etc. It is clearly not very efficient to do it in every addDataPoint(x,y) call, especially when the simulation is running in Express mode when the screen is not refreshed very often. Luckily, our hypothetical LineChartFigure class can do better and only refresh its subfigures when it matters, i.e., when the result can actually be seen in the GUI. To do that, the class needs to override cFigure's refreshDisplay() method and place the subfigure updating code there.
Figure classes that override refreshDisplay() to refresh their own contents are called self-refreshing figures. Self-refreshing figures as a feature are available since OMNeT++ version 5.1.
refreshDisplay() is declared in cFigure as:
virtual void refreshDisplay();
The default implementation does nothing.
Like cModule's refreshDisplay(), cFigure's refreshDisplay() is invoked only under graphical user interfaces (Qtenv), and right before display updates. However, it is only invoked for figures on canvases that are currently displayed. This makes it possible for canvases that are never viewed to have zero refresh overhead.
Since cFigure's refreshDisplay() is only invoked when the canvas is visible, it should only be used to update local state, i.e. only local members and local subfigures. The code should certainly not access other canvases, let alone change the state of the simulation.
8.6.14 Figures with Custom Renderers¶
In rare cases, it might be necessary to create figure types where the rendering is entirely custom and not based on already existing figures. The difficulty arises from the point that figures are only data storage classes. Actual drawing takes place in the GUI library such as Qtenv. Thus, in addition to writing the new figure class, one also needs to extend Qtenv with the corresponding rendering code. We won't go into full details on how to extend Qtenv here, just give you a few pointers in case you need it.
In Qtenv, rendering is done with the help of figure renderer classes that have a class hierarchy roughly parallel to the cFigure inheritance tree. The base classes are incidentally called FigureRenderer. How figure renderers do their job may be different in various graphical runtime interfaces. In Qtenv, they create and manipulate QGraphicsItems on a QGraphicsView. To render a new figure type, one needs to create the appropriate figure renderer classes for Qtenv.
The names of the renderer classes are provided by the figures themselves, by their getRendererClassName() methods. For example, cLineFigure's getRendererClassName() returns LineFigureRenderer. Qtenv qualifies that with its own namespace and looks for a registered class named omnetpp::qtenv::LineFigureRenderer. If such a class exists and is a Qtenv figure renderer (the appropriate dynamic_cast succeeds), an instance of that class will be used to render the figure. Otherwise, an error message will be issued.
8.7 3D Visualization¶
8.7.1 Introduction¶
OMNeT++ enables advanced 3D visualization for simulation models. 3D visualization is useful for a wide range of simulations, including mobile wireless networks, transportation models, factory floorplan simulations, and more. It allows users to visualize terrain, roads, urban street networks, indoor environments, satellites, and more. The 3D scene can also be augmented with various annotations. For wireless network simulations, for example, users can create a scene that displays not only the faithful representation of the physical world, but also the transmission range of wireless nodes, their connectivity graph, various statistics, individual wireless transmissions, and traffic intensity.
In OMNeT++, 3D visualization is completely separate from display string-based and canvas-based visualization. The scene appears on a separate GUI area.
OMNeT++'s 3D visualization is based on the open-source OpenSceneGraph and osgEarth libraries. These libraries provide high-level functionality, such as the ability to use 3D model files directly, access and render online map and satellite imagery data sources, and more.
8.7.1.1 OpenSceneGraph and osgEarth¶
OpenSceneGraph (openscenegraph.org), or OSG for short, is the base library. According to their website:
“OpenSceneGraph is an open-source high-performance 3D graphics toolkit used by application developers in fields such as visual simulation, games, virtual reality, scientific visualization, and modeling. Written entirely in standard C++ and OpenGL, it runs on all Windows platforms, OS X, GNU/Linux, IRIX, Solaris, HP-UX, AIX, and FreeBSD operating systems. OpenSceneGraph is now well established as the world-leading scene graph technology, used widely in the vis-sim, space, scientific, oil-gas, games, and virtual reality industries.”
On the other hand, osgEarth (osgearth.org) is a geospatial SDK and terrain engine built on top of OpenSceneGraph, not unlike Google Earth. It has many attractive features:
- It can use various street map providers, satellite imaging providers, and elevation data sources, both online and offline.
- Data from online sources can be exported into a file suitable for offline use.
- The scene can be annotated with various types of graphical objects.
- It includes conversion between various geographical coordinate systems.
In OMNeT++, osgEarth can be very useful for simulations involving maps, terrain, or satellites.
8.7.2 The OMNeT++ API for OpenSceneGraph¶
For 3D visualization, OMNeT++ essentially exposes the OpenSceneGraph API. Users need to assemble an OSG scene graph in the model and give it to OMNeT++ for display. The scene graph can be updated at runtime, and any changes will be reflected in the display.
- NOTE
What is a scene graph? A scene graph is a tree-like directed graph data structure that describes a 3D scene. The root node represents the entire virtual world. The world is then broken down into a hierarchy of nodes representing spatial groupings of objects, settings of the position of objects, animations of objects, or definitions of logical relationships between objects. The leaves of the graph represent the physical objects themselves, the drawable geometry, and their material properties.
Once a scene graph has been built by the simulation model, it needs to be given to a cOsgCanvas object to let the OMNeT++ GUI know about it. cOsgCanvas wraps a scene graph, along with hints for the GUI on how to best display the scene, such as the default camera position. In the GUI, users can use the mouse to manipulate the camera to view the scene from various angles and distances, look at various parts of the scene, and so on.
It is important to note that the simulation model can only manipulate the scene graph and cannot directly access the viewer in the GUI. This is due to a technical reason. The viewer may not even exist or may be displaying a different scene graph when the model tries to access it. The model may even be running under a non-GUI user interface (e.g., Cmdenv) where a viewer is not part of the program. The viewer can only be influenced through viewer hints in cOsgCanvas.
8.7.2.1 Creating and Accessing cOsgCanvas Objects¶
Every module has a built-in (default) cOsgCanvas, which can be accessed using the getOsgCanvas() method of cModule. For example, a toplevel submodule can get the network's OSG canvas using the following line:
cOsgCanvas *osgCanvas = getParentModule()->getOsgCanvas();
Additional cOsgCanvas instances can be created using the new keyword:
cOsgCanvas *osgCanvas = new cOsgCanvas("scene2");
8.7.2.2 cOsgCanvas and Scene Graphs¶
Once a scene graph has been assembled, it can be set on the cOsgCanvas using the setScene() method.
osg::Node *scene = ... osgCanvas->setScene(scene);
Subsequent changes in the scene graph will be automatically reflected in the visualization. There is no need to call setScene() again or let OMNeT++ know about the changes in any other way.
8.7.2.3 Viewer Hints¶
There are several hints that the 3D viewer can take into account when displaying the scene graph. It is important to note that these hints are only suggestions and the viewer may choose to ignore them. Additionally, users can interactively override these hints using the mouse, context menu, hotkeys, or any other means.
- Viewer style: The viewer style can be set using the
setViewerStyle() method. It determines the default hints for a
scene. The choices are STYLE_GENERIC, which should be set for generic
(non-osgEarth) scenes (default), and STYLE_EARTH for osgEarth scenes.
As a rule of thumb, STYLE_EARTH should only be used when the model is
loading .earth files.
- Camera manipulators: The OSG viewer makes use of camera
manipulators, which map mouse and keyboard gestures to camera movement.
Users can specify a manipulator using the setCameraManipulatorType()
method. Several camera manipulators are available: CAM_TERRAIN, which
is suitable for flying above an object or terrain; CAM_OVERVIEW, which
is similar to the terrain manipulator but does not allow rolling or looking
up (users can only see the object from above); CAM_TRACKBALL, which
allows unrestricted movement centered around an object; and CAM_EARTH,
which should be used when viewing the whole Earth is useful (e.g., modeling
satellites). By default, the manipulator is automatically chosen
(CAM_AUTO) based on the viewer style (CAM_OVERVIEW or
CAM_EARTH).
- Scene rendering: Users can set the default background color for
non-osgEarth scenes using the setClearColor() method. It is also
possible to set the distances of the near and far clipping planes using the
setZNear() and setZFar() methods. These distances determine
the range within which objects in the scene will be displayed. Everything in the
scene will be truncated to fit between these two planes. If parts of
objects are being clipped away from the scene, users can try adjusting these
values.
- [OSG renders the scene using a Z-buffer, which
compares the depth (i.e., distance from the camera) of each pixel to the
last drawn pixel in the same position. If the new pixel is closer, its color
will be updated, otherwise, it will be ignored. The limited precision of the
depth values can cause some pixels to be considered equidistant from the
camera even if they are not, resulting in visual glitches (flashing objects) called
Z-fighting. zNear and zFar should be chosen such that no
important objects are left out of the rendering, and to minimize Z-fighting,
the zFar/zNear ratio should not exceed about 10,000, regardless of their absolute value.]
- Viewpoint and field of view: Users can set default viewpoints using the setGenericViewpoint() method by specifying the camera position, focal point, and “up” direction as parameters. For osgEarth scenarios, users can use the setEarthViewpoint() method to set the location of the observer and focal point using geographic coordinates. It is also possible to set the camera's field of view angle using the setFieldOfViewAngle() method.
Here is an example code fragment that sets some viewer hints:
osgCanvas->setViewerStyle(cOsgCanvas::STYLE_GENERIC);
osgCanvas->setCameraManipulatorType(cOsgCanvas::CAM_OVERVIEW);
osgCanvas->setClearColor(cOsgCanvas::Color("skyblue"));
osgCanvas->setGenericViewpoint(cOsgCanvas::Viewpoint(
cOsgCanvas::Vec3d(20, -30, 30), // observer
cOsgCanvas::Vec3d(30, 20, 0), // focal point
cOsgCanvas::Vec3d(0, 0, 1))); // UP
8.7.2.4 Making Nodes Selectable¶
If a 3D object in the scene represents a C++ object in the simulation, it would often be convenient to select that object for inspection by clicking on it with the mouse.
OMNeT++ provides a wrapper node, cObjectOsgNode, that associates its children with a particular OMNeT++ object (a descendant of cObject), making them selectable in the 3D viewer. To use cObjectOsgNode, create a new instance and add your node(s) as children:
auto objectNode = new cObjectOsgNode(myModule); objectNode->addChild(myNode);
- NOTE
It is important to ensure that the OMNeT++ object exists as long as the wrapper node exists. Otherwise, clicking child nodes with the mouse may result in a crash.
8.7.2.5 Finding Resources¶
Often, 3D visualizations need to load external resources from disk, such as images or 3D models. By default, OSG tries to load these files from the current working directory unless an absolute path is given. However, it is often more convenient to load files from the folder of the current OMNeT++ module, the folder of the ini file, or the image path. To accomplish this, OMNeT++ provides a resolveResourcePath() method.
The resolveResourcePath() method of modules and channels accepts a file name (or relative path) as input and looks into a number of convenient locations to find the file. The search folders include the current working directory, the folder of the main ini file, and the folder of the NED file that defined the module or channel. If the resource is found, the function returns the full path; otherwise, it returns an empty string.
The function also looks into folders on the NED path and the image path, i.e., the roots of the NED and image folder trees. These search locations allow users to load files using full NED package names (but using slashes instead of dots), or access an icon with its full name (e.g., block/sink).
Here is an example that attempts to load a car.osgb model file:
std::string fileLoc = resolveResourcePath("car.osgb");
if (fileLoc == "")
throw cRuntimeError("car.osgb not found");
auto node = osgDB::readNodeFile(fileLoc); // use the resolved path
8.7.2.6 Conditional Compilation¶
OSG and osgEarth are optional in OMNeT++ and may not be available in all installations. However, simulation models should still compile even if the particular OMNeT++ installation does not contain the OSG and osgEarth libraries. This can be achieved using conditional compilation.
OMNeT++ detects the OSG and osgEarth libraries and defines the WITH_OSG macro if they are present. OSG-specific code should be surrounded by #ifdef WITH_OSG.
Here is an example:
...
#ifdef WITH_OSG
#include <osgDB/ReadFile>
#endif
void DemoModule::initialize()
{
#ifdef WITH_OSG
cOsgCanvas *osgCanvas = getParentModule()->getOsgCanvas();
osg::Node *scene = ... // assemble scene graph here
osgCanvas->setScene(scene);
osgCanvas->setClearColor(cOsgCanvas::Color(0,0,64)); // hint
#endif
}
8.7.2.7 Using Additional Libraries¶
OSG and osgEarth consist of several libraries. By default, OMNeT++ links simulations with only a subset of these libraries, including osg, osgGA, osgViewer, osgQt, osgEarth, and osgEarthUtil. If additional OSG and osgEarth libraries are needed, they must be linked to the model as well. To link these libraries, add the following code fragment to the makefrag file of the project:
ifneq ($(OSG_LIBS),) LIBS += $(OSG_LIBS) -losgDB -losgAnimation ... # additional OSG libs endif ifneq ($(OSGEARTH_LIBS),) LIBS += $(OSGEARTH_LIBS) -losgEarthFeatures -losgEarthSymbology ... endif
The ifneq() statements ensure that LIBS is only updated if OMNeT++ has detected the presence of OSG/osgEarth.
8.7.3 Using OSG¶
OpenScenegraph is a large library with 16+ namespaces and 40+ osg::Node subclasses. Due to size constraints, it is not possible to fully document it here. Instead, we have provided some practical advice and useful code snippets to help users get started. For more information, please refer to the openscenegraph.org website, dedicated OpenSceneGraph books (some of which are freely available), and other online resources. We have included a list of OSG-related resources at the end of this chapter.
8.7.3.1 Loading Models¶
To display a 3D model in the canvas of a compound module, an osg::Node must be provided as the root of the scene.
One method of obtaining such a Node is to load it from a file containing the model. This can be done using the osgDB::readNodeFile() method (or one of its variants). The method takes a string as an argument and, based on the protocol specification and extensions, finds a suitable loader for the file. It then loads the file and returns a pointer to the newly created osg::Node instance.
The returned node can be set as the scene of the canvas for display using the setScene() method. Here is an example:
osg::Node *model = osgDB::readNodeFile("model.osgb");
getParentModule()->getOsgCanvas()->setScene(model);
- NOTE
Where to get model files: While OpenSceneGraph recognizes and can load a wide range of formats, many 3D modeling tools can export the edited scene or part of it in OSG's native file format (osgt) with the help of exporter plugins. One such plugin for Blender has been used to develop some of the OSG demos for OMNeT++, and it has proven to be reliable.
OSG also provides support for “pseudo loaders” that allow for basic operations to be performed on loaded models. These operations are specified by appending parameters to the file name upon loading. For example:
*.cow[*].modelURL = "cow.osgb.2.scale.0,0,90.rot.0,0,-15e-1.trans"
This line scales the original cow model in cow.osgb to 200%, rotates it 90 degrees around the Z-axis, and translates it 1.5 units downwards. The floating-point values are represented in scientific notation to prevent the decimal points or commas from causing conflicts with operator or parameter separators.
Note that these modifiers operate directly on the model data and are independent of any subsequent dynamic transformations applied to the node when it is placed in the scene. For further information, refer to the OSG knowledge base.
8.7.3.2 Creating Shapes¶
Shapes can also be built programmatically using the osg::Geode, osg::ShapeDrawable, and osg::Shape classes.
To create a shape, start by creating an osg::Shape. The osg::Shape class is abstract and has several subclasses, such as osg::Box, osg::Sphere, osg::Cone, osg::Cylinder, and osg::Capsule. This object represents the abstract definition of the shape and cannot be rendered on its own. To render the shape, create an osg::ShapeDrawable for it. However, an osg::ShapeDrawable by itself cannot be added to the scene as it is not an osg::Node. To add it to the scene, the osg::ShapeDrawable must be added to an osg::Geode (a “geometry node”). Finally, add the osg::Geode to the scene.
For example, to create a cone shape and add it to the scene:
auto cone = new osg::Cone(osg::Vec3(0, 0, -coneRadius*0.75),
coneHeight, coneRadius);
auto coneDrawable = new osg::ShapeDrawable(cone);
auto coneGeode = new osg::Geode;
coneGeode->addDrawable(coneDrawable);
locatorNode->addChild(coneGeode);
Note that the same osg::Shape instance can be used to create multiple osg::ShapeDrawables, and a single osg::ShapeDrawable can be added to multiple osg::Geodes to display it in multiple places or sizes in the scene. This can improve rendering performance.
8.7.3.3 Placing and Orienting Models in a Scene¶
Models can be positioned and oriented by making them children of an osg::PositionAttitudeTransform. This node provides methods to set the position, orientation, and scale of its children. Orientation is done using quaternions (osg::Quat). To construct a quaternion, specify an axis of rotation and a rotation angle around the axis.
For example, to position and orient a node:
osg::Node *objectNode = ...; auto transformNode = new osg::PositionAttitudeTransform(); transformNode->addChild(objectNode); transformNode->setPosition(osg::Vec3d(x, y, z)); double heading = ...; // in radians transformNode->setAttitude(osg::Quat(heading, osg::Vec3d(0, 0, 1)));
8.7.3.4 Adding Labels and Annotations¶
OSG allows the display of text or image labels in the scene. Labels are rotated to be always parallel to the screen and scaled to appear in a constant size. Here is an example of creating and displaying a label relative to a node:
First, create the label:
auto label = new osgText::Text();
label->setCharacterSize(18);
label->setBoundingBoxColor(osg::Vec4(1.0, 1.0, 1.0, 0.5)); // RGBA
label->setColor(osg::Vec4(0.0, 0.0, 0.0, 1.0)); // RGBA
label->setAlignment(osgText::Text::CENTER_BOTTOM);
label->setText("Hello World");
label->setDrawMode(osgText::Text::FILLEDBOUNDINGBOX | osgText::Text::TEXT);
Alternatively, a textured rectangle with an image can be used:
auto image = osgDB::readImageFile("myicon.png");
auto texture = new osg::Texture2D();
texture->setImage(image);
auto icon = osg::createTexturedQuadGeometry(osg::Vec3(0.0, 0.0, 0.0),
osg::Vec3(image->s(), 0.0, 0.0), osg::Vec3(0.0, image->t(), 0.0),
0.0, 0.0, 1.0, 1.0);
icon->getOrCreateStateSet()->setTextureAttributeAndModes(0, texture);
icon->getOrCreateStateSet()->setMode(GL_DEPTH_TEST, osg::StateAttribute::ON);
If the image has transparent parts, the following lines should be added:
- [These lines
enable blending, and places icon in the TRANSPARENT_BIN. Normally there are
two bins, opaque and transparent. When a scene is rendered, OSG first
renders the objects in the opaque bin, then the objects in the transparent bin. More bits
can be created, but that is rarely necessary.]
icon->getOrCreateStateSet()->setMode(GL_BLEND, osg::StateAttribute::ON); icon->getOrCreateStateSet()->setRenderingHint(osg::StateSet::TRANSPARENT_BIN);
The icon and/or label needs an osg::Geode to be placed in the scene. It is advisable to disable lighting for the label.
auto geode = new osg::Geode();
geode->getOrCreateStateSet()->setMode(GL_LIGHTING,
osg::StateAttribute::OFF | osg::StateAttribute::OVERRIDE);
double labelSpacing = 2;
label->setPosition(osg::Vec3(0.0, labelSpacing, 0.0));
geode->addDrawable(label);
geode->addDrawable(icon);
The osg::Geode should be made a child of an osg::AutoTransform, which applies the correct transformations for the desired label-like behavior:
auto autoTransform = new osg::AutoTransform(); autoTransform->setAutoScaleToScreen(true); autoTransform->setAutoRotateMode(osg::AutoTransform::ROTATE_TO_SCREEN); autoTransform->addChild(geode);
The autoTransform can now be made a child of the modelToTransform and moved with it. Alternatively, both can be added to a new osg::Group as siblings and handled together.
We want the label to appear relative to an object called modelNode. One way would be to make autoTransform the child of modelNode, but here we rather place both of them under an osg::Group. The group should be inserted
auto modelNode = ... ; auto group = new osg::Group(); group->addChild(modelNode); group->addChild(autoTransform);
To place the label above the object, we set its position to (0,0,z), where z is the radius of the object's bounding sphere.
auto boundingSphere = modelNode->getBound(); autoTransform->setPosition(osg::Vec3d(0.0, 0.0, boundingSphere.radius()));
8.7.3.5 Drawing Lines¶
To draw a line between two points in the scene, create a osg::Vec3Array to store the points, an osg::DrawArrays to specify the part of the array to be drawn, and an osg::Geometry to connect them.
auto vertices = new osg::Vec3Array(); vertices->push_back(osg::Vec3(begin_x, begin_y, begin_z)); vertices->push_back(osg::Vec3(end_x, end_y, end_z)); auto drawArrays = new osg::DrawArrays(osg::PrimitiveSet::LINE_STRIP); drawArrays->setFirst(0); drawArrays->setCount(vertices->size()); auto geometry = new osg::Geometry(); geometry->setVertexArray(vertices); geometry->addPrimitiveSet(drawArrays);
The resulting osg::Geometry must be added to an osg::Geode (geometry node), which makes it possible to add it to the scene.
auto geode = new osg::Geode(); geode->addDrawable(geometry);
To change the visual properties of the line, modify the osg::StateSet of the osg::Geometry. For example, to change the line width:
float width = ...; auto stateSet = geode->getOrCreateStateSet(); auto lineWidth = new osg::LineWidth(); lineWidth->setWidth(width); stateSet->setAttributeAndModes(lineWidth, osg::StateAttribute::ON);
Because of how osg::Geometry is rendered, the specified line width will always be constant on the screen (measured in pixels), and will not vary based on the distance from the camera. To achieve that effect, a long and thin osg::Cylinder could be used instead.
It is recommended to set an appropriate osg::Material to control the
color of the line. Additionally, disabling lighting is advisable to ensure
consistent colors regardless of the viewing angle.
- [Since no normals
were specified for the vertices upon creation, they are undefined
(and wouldn't make much sense for a one-dimensional object),
but still would be used for lighting.]
auto material = new osg::Material();
osg::Vec4 colorVec(red, green, blue, opacity); // RGBA, all between 0.0 and 1.0
material->setAmbient(Material::FRONT_AND_BACK, colorVec);
material->setDiffuse(Material::FRONT_AND_BACK, colorVec);
material->setAlpha(Material::FRONT_AND_BACK, opacity);
stateSet->setAttribute(material);
stateSet->setMode(GL_LIGHTING,
osg::StateAttribute::OFF | osg::StateAttribute::OVERRIDE);
8.7.3.6 How to Organize a Scene¶
Regardless of how the scene has been constructed, it is always important to keep track of the relationship between individual nodes in the scene graph. This is because any modification made to an osg::Node is by default propagated to all of its children, including transformations, render state variables, and other flags.
For simple scenes, having an osg::Group as the root node and making every other object a direct child of it can be sufficient. This simplifies the scene and avoids unexpected issues with state inheritance. However, for more complex scenes, it is advisable to follow the logical hierarchy of the displayed objects in the scene graph.
Once the desired object has been created and added to the scene, it can be easily moved and oriented to represent the state of the simulation by making it a child of an osg::PositionAttitudeTransform node.
8.7.3.7 Using Animations¶
If the node loaded by readNodeFile() contains animations (sometimes called actions), the osgAnimation module is capable of playing them back.In simple cases, when there is only a single animation, and it is set up to play in a loop automatically (like the walking man in the osg-indoor sample simulation), there is no need to explicitly control it (assuming it is the desired behavior).
Otherwise, the individual actions can be controlled by an osgAnimation::AnimationManager, with methods such as playAnimation(), stopAnimation(), isPlaying(), etc. Animation managers can be found among the descendants of the loaded osg::Nodes that are animated using a custom osg::NodeVisitor:
osg::Node *objectNode = osgDB::readNodeFile( ... );
struct AnimationManagerFinder : public osg::NodeVisitor {
osgAnimation::BasicAnimationManager *result = nullptr;
AnimationManagerFinder()
: osg::NodeVisitor(osg::NodeVisitor::TRAVERSE_ALL_CHILDREN) {}
void apply(osg::Node& node) {
if (result) return; // already found it
if (osgAnimation::AnimationManagerBase* b =
dynamic_cast<osgAnimation::AnimationManagerBase*>(
node.getUpdateCallback())) {
result = new osgAnimation::BasicAnimationManager(*b);
return;
}
traverse(node);
}
} finder;
objectNode->accept(finder);
animationManager = finder.result;
This visitor simply finds the first node in the subtree that has an update callback of type osgAnimation::AnimationManagerBase. Its result is a new osgAnimation::BasicAnimationManager created from the base.
This new animationManager must be set as an update callback on the objectNode to be able to drive the animations. Then, any animation in the list returned by getAnimationList() can be set up as needed and played.
objectNode->setUpdateCallback(animationManager); auto animation = animationManager->getAnimationList().front(); animation->setPlayMode(osgAnimation::Animation::STAY); animation->setDuration(2); animationManager->playAnimation(animation);
8.7.3.8 State Sets¶
Every osg::Drawable can have an osg::StateSet attached to it. An easy way to access it is via the getOrCreateStateSet() method of the drawable node. An osg::StateSet encapsulates a subset of the OpenGL state and can be used to modify various rendering parameters, such as the used textures, shader programs and their parameters, color and material, face culling, depth and stencil options, and many more osg::StateAttributes.
The following example enables blending for a node and sets up a transparent, colored material to be used for rendering it through its osg::StateSet.
auto stateSet = node->getOrCreateStateSet(); stateSet->setMode(GL_BLEND, osg::StateAttribute::ON); auto matColor = osg::Vec4(red, green, blue, alpha); // all between 0.0 and 1.0 auto material = new osg::Material; material->setEmission(osg::Material::FRONT, matColor); material->setDiffuse(osg::Material::FRONT, matColor); material->setAmbient(osg::Material::FRONT, matColor); material->setAlpha(osg::Material::FRONT, alpha); stateSet->setAttributeAndModes(material, osg::StateAttribute::OVERRIDE);
To help OSG correctly render objects with transparency, they should be placed in the TRANSPARENT_BIN by setting a rendering hint on their osg::StateSet. This ensures that they will be drawn after all fully opaque objects, and in decreasing order of their distance from the camera. When multiple transparent objects intersect each other in the scene (like the transmission “bubbles” in the BostonPark configuration of the osg-earth sample simulation), there is no correct order in which they would appear. One solution for these cases is to disable writing to the depth buffer during their rendering using the osg::Depth attribute.
stateSet->setRenderingHint(osg::StateSet::TRANSPARENT_BIN); osg::Depth* depth = new osg::Depth; depth->setWriteMask(false); stateSet->setAttributeAndModes(depth, osg::StateAttribute::ON);
Please note that this still does not guarantee a completely physically accurate look, as that is a much harder problem to solve, but it at least minimizes obvious visual artifacts. Also, using too many transparent objects might decrease performance, so it is best to avoid excessive use of them.
8.7.4 Using osgEarth¶
osgEarth is a cross-platform terrain and mapping SDK built on top of OpenSceneGraph. The most visible feature of osgEarth is that it adds support for loading .earth files to osgDB::readNodeFile(). An .earth file specifies the content and appearance of the displayed globe. This can be as simple as a single image textured over a sphere or as complex as realistic terrain data and satellite images complete with street and building information dynamically streamed over the internet from a publicly available provider, thanks to the flexibility of osgEarth. osgEarth also defines additional APIs to help with coordinate conversions and other tasks. Other than that, OSG knowledge can also be applied when building osgEarth scenes.
The following sections contain some tips and code fragments to help the reader get started with osgEarth. There are also numerous other sources of information, both in print and online, that can provide more details if needed.
8.7.4.1 Earth Files¶
When using the osgEarth plugin to display a map as the visual environment of the simulation, its appearance can be described in an .earth file.
It can be loaded using the osgDB::readNodeFile() method, just like any other regular model. The resulting osg::Node will contain a node with a type of osgEarth::MapNode, which can be easily found using the osgEarth::MapNode::findMapNode() function. This node serves as the data model that contains all the data specified in the .earth file.
auto earth = osgDB::readNodeFile("example.earth");
auto mapNode = osgEarth::MapNode::findMapNode(earth);
An .earth file can specify a wide variety of options. The type attribute of the map tag (which is always the root of the document) lets the user select whether the terrain should be projected onto a flat plane (projected) or rendered as a geoid (geocentric).
The source of the terrain's texture is specified by image tags. Many different kinds of sources are supported, including local files and popular online map sources with open access like MapQuest or OpenStreetMap. These can display different kinds of graphics, such as satellite imagery, street or terrain maps, or other features provided by the given online service.
The following example .earth file will set up a spherical rendering of Earth with textures from openstreetmap.org:
<map name="OpenStreetMap" type="geocentric" version="2" >
<image name="osm_mapnik" driver="xyz" >
<url>http://[abc].tile.openstreetmap.org/z/x/y.png</url>
</image>
</map>
Elevation data can also be acquired in a similarly simple fashion using the elevation tag. The next snippet demonstrates this:
<map name="readymap.org" type="geocentric" version="2" >
<image name="readymap_imagery" driver="tms" >
<url>http://readymap.org/readymap/tiles/1.0.0/7/</url>
</image>
<elevation name="readymap_elevation" driver="tms" >
<url>http://readymap.org/readymap/tiles/1.0.0/9/</url>
</elevation>
</map>
For a detailed description of the available image and elevation source drivers, refer to the online references of osgEarth or use one of the sample .earth files included with it.
The following partial .earth file places a label over Los Angeles, an extruded ellipse (a hollow cylinder) next to it, and a big red flag nearby.
<map ... >
...
<external>
<annotations>
<label text="Los Angeles" >
<position lat="34.051" long="-117.974" alt="100" mode="relative"/>
</label>
<ellipse name="ellipse extruded" >
<position lat="32.73" long="-119.0"/>
<radius_major value="50" units="km"/>
<radius_minor value="20" units="km"/>
<style type="text/css" >
fill: #ff7f007f;
stroke: #ff0000ff;
extrusion-height: 5000;
</style>
</ellipse>
<model name="flag model" >
<url>flag.osg.18000.scale</url>
<position lat="33" long="-117.75" hat="0"/>
</model>
</annotations>
</external>
</map>
8.7.4.2 Creating Offline Tile Packages¶
Although using online map providers is convenient, there are times when it is more desirable to use an offline map resource. By doing so, the simulation can be used without internet access, map loading is faster, and the simulation is not affected by changes in the online environment (such as availability, content, and configuration changes of map servers).
There are two ways to obtain map data from the local disk: caching and using a self-contained offline map package. In this section, we will cover the latter and show how to create an offline map package from online sources using the command line tool called osgearth_package. The resulting package, unlike map cache, will also be redistributable.
With the appropriate arguments, osgearth_package can download the tiles that make up the map and arrange them in a standardized, self-contained package. It also creates a corresponding .earth file that can be used later, just like any other.
For example, the osg-earth sample simulation uses a tile package that has been created with a command similar to the following:
$ osgearth_package --tms boston.earth --out offline-tiles \
--bounds -71.0705566406 42.350425122434 -71.05957031 42.358543917497 \
--max-level 18 --out-earth boston_offline.earth --mt --concurrency 8
The --tms boston.earth arguments indicate that we want to create a package in TMS format from the input file boston.earth. The --out offline-tiles argument specifies the output directory.
The --bounds argument specifies the rectangular area of the map to include in the package, using the xmin ymin xmax ymax format in standard WGS84 datum (longitude/latitude). These example coordinates include the Boston Common area used in some samples. The size of this rectangle has a significant impact on the size of the resulting package.
The --max-level 18 argument sets the maximum level of detail to be saved. This allows adjusting the tradeoff between quality and required disk space. Values between 15 and 20 are generally suitable, depending on the size of the target area and the available storage capacity.
The --out-earth boston_offline.earth option instructs the utility to generate an .earth file with the given name in the output directory that references the prepared tile package as an image source.
The --mt --concurrency 8 arguments run the process in multithreaded mode using 8 threads, potentially speeding it up.
The tool also has a few more options for controlling the image format and compression mode, among others. Refer to the documentation for details or use the -h switch for a brief usage help.
- HINT
There is also a GUI frontend for osgearth_package called osgearth_package_qt. This tool provides an easy way to select the bounding rectangle on the actual map using the mouse. It allows the user to choose the input and output files, export options, and performs the exporting without requiring the use of a command line interface.
8.7.4.3 Placing Objects on a Map¶
To easily position a part of the scene together at a specific geographical location, an osgEarth::GeoTransform is very helpful. It takes geographic coordinates (longitude/latitude/altitude) and creates a simple Cartesian coordinate system centered on the given location. All of its children can be positioned within this local system without worrying about further coordinate transformations between Cartesian and geographic systems. The osg::PositionAttitudeTransform can be used to move and orient the children within this local system.
osgEarth::GeoTransform *geoTransform = new osgEarth::GeoTransform(); osg::PositionAttitudeTransform *localTransform = new osg::PositionAttitudeTransform(); mapNode->getModelLayerGroup()->addChild(geoTransform); geoTransform->addChild(localTransform); localTransform->addChild(objectNode); geoTransform->setPosition(osgEarth::GeoPoint(mapNode->getMapSRS(), longitude, latitude, altitude)); localTransform->setAttitude(osg::Quat(heading, osg::Vec3d(0, 0, 1)));
8.7.4.4 Adding Annotations on a Map¶
To display additional information on top of the terrain, annotations can be used. These are special objects that can adapt to the shape of the surface. Annotations can take many forms, such as simple geometric shapes like circles, ellipses, rectangles, lines, and polygons (which can be extruded upwards to create solids); texts or labels; arbitrary 3D models; or images projected onto the surface.
All annotations that can be created declaratively from an .earth file can also be programmatically generated at runtime.
This example shows how the circular transmission ranges of the cows in the osg-earth sample are created as a osgEarth::Annotation::CircleNode annotation. Some basic styling is applied to it using an osgEarth::Style, and the rendering technique is also specified.
auto scene = ...;
auto mapNode = osgEarth::MapNode::findMapNode(scene);
auto geoSRS = mapNode->getMapSRS()->getGeographicSRS();
osgEarth::Style rangeStyle;
rangeStyle.getOrCreate<PolygonSymbol>()->fill()->color() =
osgEarth::Color(rangeColor);
rangeStyle.getOrCreate<AltitudeSymbol>()->clamping() =
AltitudeSymbol::CLAMP_TO_TERRAIN;
rangeStyle.getOrCreate<AltitudeSymbol>()->technique() =
AltitudeSymbol::TECHNIQUE_DRAPE;
rangeNode = new osgEarth::Annotation::CircleNode(mapNode.get(),
osgEarth::GeoPoint(geoSRS, longitude, latitude),
osgEarth::Linear(radius, osgEarth::Units::METERS), rangeStyle);
mapNode->getModelLayerGroup()->addChild(rangeNode);
8.7.5 OpenSceneGraph/osgEarth Programming Resources¶
8.7.5.1 Online resources¶
Loading and manipulating OSG models:
- http://trac.openscenegraph.org/projects/osg/wiki/Support/UserGuides/Plugins
- http://trac.openscenegraph.org/projects/osg/wiki/Support/Tutorials/FileLoadingAndTransforms
- http://trac.openscenegraph.org/projects/osg/wiki/Support/KnowledgeBase/PseudoLoader
Creating 3D models for OpenSceneGraph using Blender:
- https://github.com/cedricpinson/osgexport
osgEarth online documentation:
- http://docs.osgearth.org/en/latest/references/earthfile.html
- http://docs.osgearth.org/en/latest/index.html
8.7.5.2 Sample code¶
Make sure to check the samples that come with the OpenSceneGraph installation, as they contain valuable information.
- https://github.com/openscenegraph/osg/tree/master/examples
- https://github.com/openscenegraph/osg-data
8.7.5.3 Books¶
The following books can be useful for more complex visualization tasks:
- OpenSceneGraph Quick Start Guide by Paul Martz.
This book is a concise introduction to the OpenSceneGraph API. It can be purchased from http://www.osgbooks.com and is also available as a free PDF download.
- OpenSceneGraph 3.0: Beginners Guide by Wang Rui. Packt Publishing, 2010.
This book is a concise introduction to the main features of OpenSceneGraph that leads the reader into the fundamentals of developing virtual reality applications. Practical instructions and explanations accompany every step.
- OpenSceneGraph 3.0 Cookbook by Wang Rui and Qian Xuelei. Packt Publishing, 2010.
This book contains 100 recipes in 9 chapters, focusing on different fields including installation, nodes, geometries, camera manipulation, animations, effects, terrain building, data management, and GUI integration.
9 Building Simulation Programs¶
9.1 Overview¶
This chapter describes the process and tools for building executable simulation models from their source code.
As described in the previous chapters, the source of an OMNeT++ model usually contains the following files:
- C++ (.cc and .h) files, containing simple module implementations and other code;
- Message (.msg) files, containing message definitions to be translated into C++ classes;
- NED (.ned) files with component declarations and topology descriptions;
- Configuration (.ini) files with model parameter assignments and other settings.
The process to turn the source into an executable form is this, in a nutshell:
- Message files are translated into C++ using the message compiler, opp_msgc
- C++ sources are compiled into object form (.o files)
- Object files are linked with the simulation kernel and other libraries to get an executable or a shared library
Note that apart from the first step, the process is the same as building any C/C++ program. Also, note that NED and ini files do not play a part in this process, as they are loaded by the simulation program at runtime.
One needs to link with the following libraries:
- The simulation kernel and class library (the oppsim library) and its dependencies (oppenvir, oppcommon, oppnedxml, etc).
- Optionally, one or more user interface libraries (oppqtenv, oppcmdenv). Note that these libraries themselves may depend on other libraries.
The exact file names of libraries depend on the platform and a number of
additional factors.
- [On Unix-like platforms, file names are
prefixed with lib. For debug versions, a d is appended to the
name. Static libraries have the .a suffix (except on Windows where
the file extension is .lib). Shared libraries end in .so on
Unix-like platforms (but .dylib on OS X), and .dll on Windows.]
Figure below shows an overview of the process of building (and running) simulation programs.

You can see that the build process is not complicated. Tools such as make and opp_makemake, to be described in the rest of the chapter, are primarily needed to optimize rebuilds (if a message file has been translated already, there is no need to repeat the translation for every build unless the file has changed) and for automation.
9.2 Using opp_makemake and Makefiles¶
There are several tools available for managing the build of C/C++ programs. OMNeT++ uses the traditional way, Makefiles. Writing a Makefile is usually a tedious task. However, OMNeT++ provides a tool that can generate the Makefile for the user, saving manual labor.
opp_makemake can automatically generate a Makefile for simulation programs, based on the source files in the current directory and (optionally) in subdirectories.
9.2.1 Command-line Options¶
The most important options accepted by opp_makemake are:
- -f, --force: Force overwriting an existing Makefile.
- -o <filename>: Name of the simulation executable or library to be built.
- -O <directory>, --out <directory>: Specifies the name of the output directory tree for out-of-directory build.
- --deep: Generates a “deep” Makefile. A deep Makefile will cover the whole source tree under the make directory, not just files in that directory.
- -r, --recurse: Causes make to recursively descend into all subdirectories; subdirectories are expected to contain Makefiles themselves.
- -X <directory>, -X<directory>, --except <directory>: With -r or --deep: ignore the given directory.
- -d<subdir>, -d <subdir>, --subdir <subdir>: Causes make to switch to the given directory and invoke a Makefile in that directory.
- -n, --nolink: Produce object files but do not create an executable or library.
- -s, --make-so: Build a shared library (.so, .dll, or .dylib).
- -a, --make-lib: Create a static library (.a or .lib).
- -I<dir>: Add the given directory to the C++ include path.
- -D<name>[=<value>], -D <name>[=<value>], --define <name>[=<value>]: Define the given symbol in the C++ compiler.
- -L<dir>: Add the given directory to the library path.
- -l<library>: Additional library to link against.
There are several other options; run opp_makemake -h to see the complete list.
9.2.2 Basic Use¶
Assuming the source files (*.ned, *.msg, *.cc, *.h) are located in a single directory, one can change to that directory and type:
$ opp_makemake
This will create a file named Makefile. Now, running the make program will build a simulation executable.
$ make
- IMPORTANT
The generated Makefile will contain the names of the source files, so you need to re-run opp_makemake every time new files are added to or removed from the project.
To regenerate an existing Makefile, add the -f option to the command line, otherwise opp_makemake will refuse to overwrite it.
$ opp_makemake -f
The name of the output file will be derived from the name of the project directory (see later). It can be overridden with the -o option:
$ opp_makemake -f -o aloha
The generated Makefile supports the following targets:
- all: Builds the simulation; this is also the default target.
- clean: Deletes files that were produced by the make process.
9.2.3 Debug and Release Builds¶
opp_makemake generates a Makefile that can create both release and debug builds. By default, it creates a release version, but it is easy to override this behavior by defining the MODE variable on the make command line.
$ make MODE=debug
It is also possible to generate a Makefile that defaults to debug builds. This can be achieved by adding the --mode option to the opp_makemake command line.
$ opp_makemake --mode debug
9.2.4 Debugging the Makefile¶
opp_makemake generates a Makefile that prints only minimal information during the build process (only the name of the compiled file). To see the full compiler commands executed by the Makefile, add the V=1 parameter to the make command line.
$ make V=1
9.2.5 Using External C/C++ Libraries¶
If the simulation model relies on an external library, the following opp_makemake options can be used to make the simulation link with the library.
- Use the -I<dir> option to specify the location of the header files. The directory will be added to the compiler's include path. This option is not needed if the header files are at a standard location, e.g. installed under /usr/include on Linux.
- Use the -L<dir> to specify the location of the binaries (static or shared library files). Again, this option is not needed if the binaries are at a standard place, e.g., under /usr/lib.
- Use the -l<libname> to specify the name of the library. The name is normally the file name without the lib prefix and the file name extension (e.g., .a, .so, .dylib).
For example, linking with a hypothetical Foo library installed under /opt might require the following additional opp_makemake options: -I/opt/foo/include -L/opt/foo/lib -lfoo.
9.2.6 Building Directory Trees¶
It is possible to build a whole source directory tree with a single Makefile. A source tree will generate a single output file (executable or library). A source directory tree will always have a Makefile in its root, and source files may be placed anywhere in the tree.
To turn on this option, use the opp_makemake --deep option. opp_makemake will collect all .cc and .msg files from the whole subdirectory tree and generate a Makefile that covers all. To exclude a specific directory, use the -X exclude/dir/path option. (Multiple -X options are accepted.)
An example:
$ opp_makemake -f --deep -X experimental -X obsolete
In the C++ code, include statements should contain the location of the file
relative to the Makefile's location.
- [
Support for deep includes (automatically adding each subdirectory
to the include path so that includes can be written without specifying
the location of the file) has been dropped in OMNeT++ version 5.1, due to
being error-prone in large projects and having limited usefulness for
small projects.]
#include "utils/common/Foo.h"
9.2.7 Dependency Handling¶
The make program can utilize dependency information in the Makefile to shorten build times by omitting build steps whose input has not changed since the last build. Dependency information is automatically created and kept up-to-date during the build process.
Dependency information is kept in .d files in the output directory.
9.2.8 Out-of-Directory Build¶
The build system creates object and executable files in a separate directory, called the output directory. By default, the output directory is out/<configname>, where the <configname> part depends on the compiler toolchain and build mode settings. (For example, the result of a debug build with GCC will be placed in out/gcc-debug.) The subdirectory tree inside the output directory will mirror the source directory structure.
- NOTE
Generated source files (i.e. those created by opp_msgc) will be placed in the source tree rather than the output directory.
By default, the out directory is placed in the project root directory. This location can be changed with opp_makemake's -O option.
$ opp_makemake -O ../tmp/obj
- NOTE
The project directory is identified as the first ancestor of the current directory that contains a .project file.
9.2.9 Building Shared and Static Libraries¶
By default, the Makefile will create an executable file, but it is also possible to build shared or static libraries. Shared libraries are usually a better choice.
Use --make-so to create shared libraries, and --make-lib to build static libraries. The --nolink option completely omits the linking step, which is useful for top-level Makefiles that only invoke other Makefiles, or when custom linking commands are needed.
9.2.10 Recursive Builds¶
The --recurse option enables recursive make; when you build the simulation, make descends into the subdirectories and runs make in them too. By default, --recurse descends into all subdirectories; the -X <dir> option can be used to ignore certain subdirectories. This option is especially useful for top-level Makefiles.
The --recurse option automatically discovers subdirectories, but this is sometimes inconvenient. Your source directory tree may contain parts that need their own hand-written Makefile. This can happen if you include source files from another non-OMNeT++ project. With the -d <dir> or --subdir <dir> option, you can explicitly specify which directories to recurse into, and also, the directories need not be direct children of the current directory.
The recursive make options (--recurse, -d, --subdir) imply -X, that is, the directories recursed into will be automatically excluded from deep Makefiles.
You can control the order of traversal by adding dependencies into the makefrag file (see [9.2.11])
- NOTE
With -d, it is also possible to create infinite recursions. opp_makemake cannot detect them, it is your responsibility that cycles do not occur.
Motivation for recursive builds:
- Top-level Makefile.
- Integrating sources that have their own Makefile.
9.2.11 Customizing the Makefile¶
It is possible to add rules or otherwise customize the generated Makefile by providing a makefrag file. When you run opp_makemake, it will automatically insert the content of the makefrag file into the resulting Makefile. With the -i option, you can also name other files to be included in the Makefile.
makefrag will be inserted after the definitions but before the first rule, so it is possible to override existing definitions and add new ones, and also to override the default target.
makefrag can be useful if some of your source files are generated from other files (for example, you use generated NED files), or you need additional targets in your Makefile or just simply want to override the default target in the Makefile.
- NOTE
If you change the content of the makefrag file, you must recreate the Makefile using the opp_makemake command.
9.2.12 Projects with Multiple Source Trees¶
In the case of a large project, your source files may be spread across several directories and your project may generate more than one executable file (i.e., several shared libraries, examples, etc.).
Once you have created your Makefiles with opp_makemake in every source directory tree, you will need a top-level Makefile. The top-level Makefile usually calls only the Makefiles recursively in the source directory trees.
9.2.13 A Multi-Directory Example¶
For a complex example of using opp_makemake, we will show how to create the Makefiles for a large project. First, take a look at the project's directory structure and find the directories that should be used as source trees:
project/
doc/
images/
simulations/
contrib/ <-- source tree (build libmfcontrib.so from this dir)
core/ <-- source tree (build libmfcore.so from this dir)
test/ <-- source tree (build testSuite executable from this dir)
Additionally, there are dependencies between these output files: mfcontrib requires mfcore and testSuite requires mfcontrib (and indirectly mfcore).
First, we create the Makefile for the core directory. The Makefile will build a shared library from all .cc files in the core subtree and will name it mfcore:
$ cd core && opp_makemake -f --deep --make-so -o mfcore -O out
The contrib directory depends on mfcore, so we use the -L and -l options to specify the library we should link with.
$ cd contrib && opp_makemake -f --deep --make-so -o mfcontrib -O out \ -I../core -L../out/\$\(CONFIGNAME\)/core -lmfcore
The testSuite will be created as an executable file that depends on both mfcontrib and mfcore.
$ cd test && opp_makemake -f --deep -o testSuite -O out \
-I../core -I../contrib -L../out/\$\(CONFIGNAME\)/contrib -lmfcontrib
Now, let us specify the dependencies among the above directories. Add the lines below to the makefrag file in the project root directory.
contrib_dir: core_dir test_dir: contrib_dir
Now the last step is to create a top-level Makefile in the root of the project that calls the previously created Makefiles in the correct order. We will use the --nolink option, exclude every subdirectory from the build (-X.), and explicitly call the above Makefiles using -d <dir>. opp_makemake will automatically include the above created makefrag file.
$ opp_makemake -f --nolink -O out -d test -d core -d contrib -X.
9.3 Project Features¶
Long compile times are often an inconvenience when working with large OMNeT++-based model frameworks. OMNeT++ has a facility named project features that lets you reduce build times by excluding or disabling parts of a large model library. For example, you can disable modules that you do not use for the current simulation study. The word feature refers to a piece of the project's codebase that can be turned off as a whole.
Additional benefits of project features include enforcing cleaner separation of unrelated parts in the model framework, being able to exclude code written for other platforms, and a less cluttered model palette in the NED editor.
- NOTE
Modularization could also be achieved by breaking up the model framework into several smaller projects, but that would cause other kinds of inconveniences for model developers and users alike.
Project features can be enabled/disabled from both the IDE and the command line. It is possible to query the list of enabled project features and use this information in creating a Makefile for the project.
9.3.1 What is a Project Feature¶
Features can be defined per project. As already mentioned, a feature is a piece of the project's codebase that can be turned off as a whole, that is, excluded from the C++ sources (and thus from the build) and also from NED. Feature definitions are typically written and distributed by the author of the project; end users are only presented with the option of enabling/disabling those features. A feature definition contains:
- Feature name; for example "UDP" or "Mobility examples".
- Feature description; This is a few sentences of text describing what the feature is or does; for example "Implementation of the UDP protocol".
- Labels; This is a list of labels or keywords that facilitate grouping or finding features.
- Initially enabled. This is a boolean flag that determines the initial enablement of the feature.
- Required features. Some features may be built on top of others; for example, an HMIPv6 protocol implementation relies on MIPv6, which in turn relies on IPv6. Thus, HMIPv6 can only be enabled if MIPv6 and IPv6 are enabled as well.
- NED packages; This is a list of NED package names that identify the code that implements the feature. When you disable the feature, NED types defined in those packages and their subpackages will be excluded; also, C++ code in the folders that correspond to the packages (i.e. in the same folders as excluded NED files) will also be excluded.
- Extra C++ source folders; If the feature contains C++ code that lives outside NED source folders (non-typical), those folders are listed here.
- Compile options. When the feature is enabled, the compiler options listed here are added to the compiler command line of all C++ files in the project. Defines (-D options) are treated somewhat specially: the project can be set up so that defines go into a generated header file as #define lines instead of being added to the compiler command line. It is customary for each feature to have a corresponding symbol (WITH_FOO for a feature called Foo), so that other parts of the code can contain conditional blocks that are only compiled in when the given feature is enabled (or disabled).
- Linker options. When the feature is enabled, the linker options listed here are added to the linker command line. A typical use of this field is linking with additional libraries that the feature's code requires, for example libavcodec. Currently only the -l option (link with library) is supported here.
9.3.2 The opp_featuretool Program¶
Project features can be queried and manipulated using the opp_featuretool program. The first argument to the program must be a command; the most frequently used ones are list, enable and disable. The operation of commands can be refined with further options. One can obtain the full list of commands and options using the -h option.
Here are some examples of using the program.
Listing all features in the project:
$ opp_featuretool list
Listing all enabled features in the project:
$ opp_featuretool list -e
Enabling all features:
$ opp_featuretool enable all
Disabling a specific feature:
$ opp_featuretool disable Foo
The following command prints the command line options that should be used with opp_makemake to create a Makefile that builds the project with the currently enabled features:
$ opp_featuretool options
The easiest way to pass the output of the above command to opp_makemake is the $(...) shell construct:
$ opp_makemake --deep $(opp_featuretool options)
Often it is convenient to put feature defines (e.g. WITH_FOO) into a header file instead of passing them to the compiler via -D options. This makes it easier to detect feature enablements from derived projects, and also makes it easier for C++ code editors to correctly highlight conditional code blocks that depend on project features.
The header file can be generated with opp_featuretool using the following command:
$ opp_featuretool defines >feature_defines.h
At the same time, -D options must be removed from the compiler command line. opp_featuretool options has switches to filter them out. The modified command for Makefile generation:
$ opp_makemake --deep $(opp_featuretool options -fl)
It is advisable to create a Makefile rule that regenerates the header file when feature enablements change:
feature_defines.h: $(wildcard .oppfeaturestate) .oppfeatures
opp_featuretool defines >feature_defines.h
9.3.3 The .oppfeatures File¶
Project features are defined in the .oppfeatures file in your project's root directory. This is an XML file, and it has to be written by hand (there is no specialized editor for it).
The root element is <features>, and it may have several <feature> child elements, each defining a project feature. The fields of a feature are represented with XML attributes; attribute names are id, name, description, initiallyEnabled, requires, labels, nedPackages, extraSourceFolders, compileFlags and linkerFlags. Items within attributes that represent lists (requires, labels, etc.) are separated by spaces.
Here is an example feature from the INET Framework:
<feature
id="TCP_common"
name="TCP Common"
description = "The common part of TCP implementations"
initiallyEnabled = "true"
requires = "IPv4"
labels = "Transport"
nedPackages = "inet.transport.tcp_common
inet.applications.tcpapp
inet.util.headerserializers.tcp"
extraSourceFolders = ""
compileFlags = "-DWITH_TCP_COMMON"
linkerFlags = ""
/>
Project feature enablements are stored in the .featurestate file.
9.3.4 How to Introduce a Project Feature¶
If you plan to introduce a project feature in your project, here's what you'll need to do:
- Isolate the code that implements the feature into a separate source directory
(or several directories). This is because only whole folders can be
declared as part of a feature, individual source files cannot.
- Check the remainder of the project. If you find source lines that reference
code from the new feature, use conditional compilation (#ifdef WITH_YOURFEATURE)
to make sure that the code compiles (and either works sensibly or throws an error)
when the new feature is disabled. (Your feature should define the WITH_YOURFEATURE
symbol, i.e. -DWITH_YOURFEATURE will need to be added to the feature compile flags.)
- Add the feature description into the .oppfeatures file of your project.
- Test. A rudimentary test is to verify that the project compiles at all, both with the new feature enabled and disabled. For projects with many features, automated build tests that compile the project using various feature configurations can be very useful. Such build tests can be written on top of opp_featuretool.
10 Configuring Simulations¶
10.1 The Configuration File¶
Configuration and input data for the simulation are in a configuration file usually called omnetpp.ini.
10.1.1 An Example¶
For a start, let us see a simple omnetpp.ini file which can be used to run the Fifo example simulation.
[General] network = FifoNet sim-time-limit = 100h cpu-time-limit = 300s #debug-on-errors = true #record-eventlog = true [Config Fifo1] description = "low job arrival rate" **.gen.sendIaTime = exponential(0.2s) **.gen.msgLength = 100b **.fifo.bitsPerSec = 1000bps [Config Fifo2] description = "high job arrival rate" **.gen.sendIaTime = exponential(0.01s) **.gen.msgLength = 10b **.fifo.bitsPerSec = 1000bps
The file is grouped into sections named [General], [Config Fifo1] and [Config Fifo2], each containing several entries.
10.1.2 File Syntax¶
An OMNeT++ configuration file is a line-oriented text file. The encoding is primarily ASCII, but non-ASCII characters are permitted in comments and string literals. This allows for using encodings that are a superset of ASCII, for example ISO 8859-1 and UTF-8. There is no limit on the file size or on the line length.
Comments may be placed at the end of any line after a hash mark, “#”. Comments extend to the end of the line and are ignored during processing. Blank lines are also allowed and are ignored.
Long lines can be broken into multiple lines in two ways: using the traditional trailing backslash notation also found in C/C++, or alternatively, by indenting the continuation lines.
When using the former method, the rule is that if the last character of a line is “\”, it will be joined with the next line after removing the backslash and the newline. (Potential leading whitespace on the second line is preserved.) Note that this allows breaking the line even in the middle of a name, number or string constant.
When using the latter method, a line can be broken between any two tokens by inserting a newline and indenting the next line. An indented line is interpreted as a continuation of the previous line. The first line and indented lines that follow it are then parsed as a single multi-line unit. Consequently, this method does not allow breaking a line in the middle of a word or inside string constants.
The two ways of breaking lines can be freely combined.
There are three types of lines: section heading lines, key-value lines, and directive lines:
- Section heading lines contain a section name enclosed in square brackets.
- Key-value lines have the <key>=<value> syntax; spaces are allowed (but not required) on both sides of the equal sign. If a line contains more than one equal sign, the leftmost one is taken as the key-value separator.
- Currently there is only one kind of directive line, include. An include line starts with the include word, followed by the name of the file to be included.
Key-value lines may not occur above the first section heading line (except in included files, see later).
Keys may be further classified based on syntax alone:
- Keys that do not contain dots represent global or per-run configuration options.
- If a key contains a dot, its last component (substring after the last dot) is considered. If the last component contains a hyphen or is equal to typename, the key represents a per-object configuration option.
- Otherwise, the key represents a parameter assignment. Thus, parameter assignment keys contain a dot and no hyphen after the last dot.
An example:
# This is a comment line [General] # section heading network = Foo # configuration option debug-on-errors = false # another configuration option **.vector-recording = false # per-object configuration option **.app*.typename = "HttpClient" # per-object configuration option **.app*.interval = 3s # parameter value **.app*.requestURL = "http://www.example.com/this-is-a-very-very-very-very\ -very-long-url?q=123456789" # a two-line parameter value
10.1.3 File Inclusion¶
OMNeT++ supports including an ini file in another, via the include keyword. This feature allows one to partition a large ini file into logical units, fixed and varying parts, etc.
An example:
# omnetpp.ini ... include params1.ini include params2.ini include ../common/config.ini ...
One can also include files from other directories. If the included ini file further includes other files, their path names will be understood as relative to the location of the file which contains the reference, rather than relative to the current working directory of the simulation.
This rule also applies to other file names occurring in ini files (such as the load-libs, output-vector-file, output-scalar-file, etc. options, and xmldoc() module parameter values.)
In included files, it is allowed to have key-value lines without first having a section heading line. File inclusion is conceptually handled as text substitution, except that a section heading in an included file will not change the current section of the main file. The following example illustrates the rules:
# incl.ini foo1 = 1 # no preceding section heading: these lines will go into foo2 = 2 # whichever section the file is included into [Config Bar] bar = 3 # this will always go into [Config Bar]
# omnetpp.ini [General] include incl.ini # adds foo1/foo2 to [General], and defines [Config Bar] w/ bar baz1 = 4 # include files don't change the current section, so these baz2 = 4 # lines still belong to [General]
- NOTE
The concept of file inclusion implies that include files may not make sense on their own. Thus, when an included ini file is opened in the ini editor in the IDE, file contents may be flagged with errors and warnings. These errors/warnings disappear when the file is viewed as part of its main file.
10.2 Sections¶
An ini file may contain a [General] section, and several [<configname>] or [Config <configname>] sections. The use of the Config prefix is optional, i.e. [Foo] and [Config Foo] are equivalent.
The order of the sections is not significant.
10.2.1 The [General] Section¶
The most commonly used options of the [General] section are the following.
- The network option selects the model to be set up and run.
- The length of the simulation can be set with the sim-time-limit and the cpu-time-limit options (the usual time units such as ms, s, m, h, etc. can be used).
Note that the NED files loaded by the simulation may contain several networks, and any of them may be specified in the network option.
10.2.2 Named Configurations¶
Named configurations are in sections of the form [Config <configname>] or [<configname>] (the Config word is optional), where <configname> is by convention a camel-case string that starts with a capital letter: Config1, WirelessPing, OverloadedFifo, etc. For example, omnetpp.ini for an Aloha simulation might have the following skeleton:
[General] ... [Config PureAloha] ... [Config SlottedAloha1] ... [Config SlottedAloha2] ...
Some configuration options (such as user interface selection) are only accepted in the [General] section, but most of them can go into Config sections as well.
When a simulation is run, one needs to select one of the configurations to be activated. In Cmdenv, this is done with the -c command-line option:
$ aloha -c PureAloha
The simulation will then use the contents of the [Config PureAloha] section to set up the simulation. (Qtenv, of course, lets the user choose the configuration from a dialog.)
10.2.3 Section Inheritance¶
When the PureAloha configuration is activated, the contents of the [General] section will also be taken into account: if some configuration option or parameter value is not found in [Config PureAloha], then the search will continue in the [General] section. In other words, lookups in [Config PureAloha] will fall back to [General]. The [General] section itself is optional; when it is absent, it is treated like an empty [General] section.
All named configurations fall back to [General] by default. However, for each configuration it is possible to specify the fallback section or a list of fallback sections explicitly, using the extends key. Consider the following ini file skeleton:
[General] ... [Config SlottedAlohaBase] ... [Config LowTrafficSettings] ... [Config HighTrafficSettings] ... [Config SlottedAloha1] extends = SlottedAlohaBase, LowTrafficSettings ... [Config SlottedAloha2] extends = SlottedAlohaBase, HighTrafficSettings ... [Config SlottedAloha2a] extends = SlottedAloha2 ... [Config SlottedAloha2b] extends = SlottedAloha2 ...
When SlottedAloha2b is activated, lookups will consider sections in the following order (this is also called the section fallback chain): SlottedAloha2b, SlottedAloha2, SlottedAlohaBase, HighTrafficSettings, General.
The effect is the same as if the contents of the sections SlottedAloha2b, SlottedAloha2, SlottedAlohaBase, HighTrafficSettings and General were copied together into one section, one after another, [Config SlottedAloha2b] being at the top, and [General] at the bottom. Lookups always start at the top, and stop at the first matching entry.
The order of the sections in the fallback chain is computed using the C3 linearization algorithm ([Barrett1996]):
The fallback chain of a configuration A is
- if A does not have an extends key then A, General
- otherwise the merge of the configurations enumerated in the extends key, and all of their fallback section chains. The merge is monotonic: if some configuration X precedes configuration Y in one of the input chains, it will precede it in the output chain too.
The section fallback chain can be printed by the -X option of the command line of the simulation program:
$ aloha -X SlottedAloha2b OMNeT++ Discrete Event Simulation ... Config SlottedAloha2b Config SlottedAloha2 Config SlottedAlohaBase Config HighTrafficSettings General
The section fallback concept is similar to multiple inheritance in object-oriented languages, and the benefits are similar too; one can factor out the common parts of several configurations into a “base” configuration, and additionally, one can reuse existing configurations without copying, by using them as a base. In practice, one will often have “abstract” configurations too (in the C++/Java sense), which assign only a subset of parameters and leave the others open, to be assigned in derived configurations.
When experimenting with a lot of different parameter settings for a simulation model, file inclusion and section inheritance can make it much easier to manage ini files.
10.3 Assigning Module Parameters¶
Simulations receive input via module parameters, which can be assigned a value in NED files or in omnetpp.ini -- in this order. Since parameters assigned in NED files cannot be overridden in omnetpp.ini, one can think of them as being “hardcoded”. In contrast, it is easier and more flexible to maintain module parameter settings in omnetpp.ini.
In omnetpp.ini, module parameters are referred to by their full paths (hierarchical names). This name consists of the dot-separated list of the module names (from the top-level module down to the module containing the parameter), plus the parameter name (see section [7.1.2.2]).
An example omnetpp.ini which sets the numHosts parameter of the top-level module and the transactionsPerSecond parameter of the server module:
[General] Network.numHosts = 15 Network.server.transactionsPerSecond = 100
Typename pattern assignments are also accepted:
[General] Network.host[*].app.typename = "PingApp"
10.3.1 Using Wildcard Patterns¶
Models can have a large number of parameters to be configured, and it would be tedious to set them one-by-one in omnetpp.ini. OMNeT++ supports wildcard patterns which allow setting several model parameters at once. The same pattern syntax is used for per-object configuration options; for example <object-path-pattern>.record-scalar, or <module-path-pattern>.rng-<N>.
The pattern syntax is a variation on Unix glob-style patterns. The most apparent differences from globbing rules are the distinction between * and **, and that character ranges should be written with curly braces instead of square brackets, i.e., any-letter is expressed as {a-zA-Z} and not as [a-zA-Z], because square brackets are reserved for the notation of module vector indices.
Pattern syntax:
- ? : matches any character except dot (.)
- * : matches zero or more characters except dot (.)
- ** : matches zero or more characters (any character)
- {a-f} : set: matches a character in the range a-f
- {^a-f}: negated set: matches a character NOT in the range a-f
- {38..150} : numeric range: any number (i.e., sequence of digits) in the range 38..150, inclusive; both limits are optional
- [38..150] : index range: any number in square brackets in the range 38..150, inclusive; both limits are optional
- backslash (\) : takes away the special meaning of the subsequent character
10.3.1.1 Precedence¶
The order of entries is very important with wildcards. When a key matches several wildcard patterns, the first matching occurrence is used. This means that one needs to list specific settings first, and more general ones later. Catch-all settings should come last.
An example ini file:
[General] *.host[0].waitTime = 5ms # specifics come first *.host[3].waitTime = 6ms *.host[*].waitTime = 10ms # catch-all comes last
10.3.1.2 Asterisk vs Double Asterisk¶
The * wildcard is for matching a single module or parameter name in the path name, while ** can be used to match several components in the path. For example, **.queue*.bufSize matches the bufSize parameter of any module whose name begins with queue in the model, while *.queue*.bufSize or net.queue*.bufSize selects only queues immediately on the network level. Also note that **.queue**.bufSize would match net.queue1.foo.bar.bufSize as well!
10.3.1.3 Sets, Negated Sets¶
Sets and negated sets can contain several character ranges and also enumerations of characters. For example, {_a-zA-Z0-9} matches any letter or digit, plus the underscore; {xyzc-f} matches any of the characters x, y, z, c, d, e, f. To include '-' in the set, put it in a position where it cannot be interpreted as a character range, for example: {a-z-} or {-a-z}. To include '}' in the set, it must be the first character: {}a-z}, or as a negated set: {^}a-z}. A backslash is always taken as a literal backslash (and not as an escape character) within set definitions.
10.3.1.4 Numeric Ranges and Index Ranges¶
Only nonnegative integers can be matched. The start or the end of the range (or both) can be omitted: {10..}, {..99} or {..} are valid numeric ranges (the last one matches any number). The specification must use exactly two dots. Caveat: *{17..19} will match a17, 117 and 963217 as well, because the * can also match digits!
An example of numeric ranges:
[General] *.*.queue[3..5].bufSize = 10 *.*.queue[12..].bufSize = 18 *.*.queue[*].bufSize = 6 # this will only affect queues 0,1,2 and 6..11
10.3.2 Using the Default Values¶
It is also possible to utilize the default values specified in the NED files. The <parameter-fullpath>=default setting assigns the default value to a parameter if it has one.
The <parameter-fullpath>=ask setting will try to get the parameter value interactively from the user.
If a parameter was not set but has a default value, that value will be assigned. This is like having a **=default line at the bottom of the [General] section.
If a parameter was not set and has no default value, that will either cause an error or will be interactively prompted for, depending on the particular user interface.
- NOTE
In Cmdenv, one must explicitly enable interactive mode with the --cmdenv-interactive=true option, otherwise the simulation program will stop with an error in the setup phase.
More precisely, parameter resolution takes place as follows:
- If the parameter is assigned in NED, it cannot be overridden in the configuration. The value is applied and the process finishes.
- If the first match is a value line (matches <parameter-fullpath>=<value>), the value is applied and the process finishes.
- If the first match is a <parameter-fullpath>=default line, the default value is applied and the process finishes.
- If the first match is a <parameter-fullpath>=ask line, the parameter will be asked from the user interactively (UI dependent).
- If there was no match and the parameter has a default value, it is applied and the process finishes.
- Otherwise, the parameter is declared unassigned, and handled accordingly by the user interface. It may be reported as an error, or may be asked from the user interactively.
10.4 Parameter Studies¶
It is quite common in simulation studies that the simulation model is run several times with different parameter settings, and the results are analyzed in relation to the input parameters. OMNeT++ 3.x had no direct support for batch runs, and users had to resort to writing shell (or Python, Ruby, etc.) scripts that iterated over the required parameter space, to generate a (partial) ini file and run the simulation program in each iteration.
OMNeT++ 4.x largely automates this process and eliminates the need for writing batch execution scripts. It is the ini file where the user can specify iterations over various parameter settings. Here is an example:
[Config AlohaStudy]
*.numHosts = ${1, 2, 5, 10..50 step 10}
**.host[*].generationInterval = exponential(${0.2, 0.4, 0.6}s)
This parameter study expands to 8*3 = 24 simulation runs, where the number of hosts iterates over the numbers 1, 2, 5, 10, 20, 30, 40, 50, and for each host count three simulation runs will be conducted, with the generation interval being exponential(0.2), exponential(0.4), and exponential(0.6).
How can it be used? First of all, running the simulation program with the -q numruns option will print how many simulation runs a given configuration expands to.
$ ./aloha -c AlohaStudy -q numruns OMNeT++ Discrete Event Simulation ... Config: AlohaStudy Number of runs: 24
When -q runs is used instead, the program will print the list of runs, with the values of the iteration variables for each run. (Use -q rundetails to get even more info.) Note that the parameter study actually maps to nested loops, with the last ${...} becoming the innermost loop. The iteration variables are just named $0 and $1 -- we'll see that it is possible to give meaningful names to them. Please ignore the $repetition=0 part in the printout for now.
$ ./aloha -c AlohaStudy -q runs OMNeT++ Discrete Event Simulation ... Config: AlohaStudy Number of runs: 24 Run 0: $0=1, $1=0.2, $repetition=0 Run 1: $0=1, $1=0.4, $repetition=0 Run 2: $0=1, $1=0.6, $repetition=0 Run 3: $0=2, $1=0.2, $repetition=0 Run 4: $0=2, $1=0.4, $repetition=0 Run 5: $0=2, $1=0.6, $repetition=0 Run 6: $0=5, $1=0.2, $repetition=0 Run 7: $0=5, $1=0.4, $repetition=0 ... Run 19: $0=40, $1=0.4, $repetition=0 Run 20: $0=40, $1=0.6, $repetition=0 Run 21: $0=50, $1=0.2, $repetition=0 Run 22: $0=50, $1=0.4, $repetition=0 Run 23: $0=50, $1=0.6, $repetition=0
Any of these runs can be executed by passing the -r <runnumber> option to Cmdenv. So, the task is now to run the simulation program 24 times, with -r running from 0 through 23:
$ ./aloha -u Cmdenv -c AlohaStudy -r 0 $ ./aloha -u Cmdenv -c AlohaStudy -r 1 $ ./aloha -u Cmdenv -c AlohaStudy -r 2 ... $ ./aloha -u Cmdenv -c AlohaStudy -r 23
This batch can be executed either from the OMNeT++ IDE (where you are prompted to pick an executable and an ini file, choose the configuration from a list, and just click Run), or using a little command-line batch execution tool (opp_runall) supplied with OMNeT++.
Actually, it is also possible to make Cmdenv execute all runs in one go, by simply omitting the -r option.
$ ./aloha -u Cmdenv -c AlohaStudy OMNeT++ Discrete Event Simulation Preparing for running configuration AlohaStudy, run #0... ... Preparing for running configuration AlohaStudy, run #1... ... ... Preparing for running configuration AlohaStudy, run #23...
However, this approach is not recommended, because it is more susceptible to C++ programming errors in the model. (For example, if any of the runs crashes, the whole batch stops -- which may not be what the user wants.)
10.4.1 Iterations¶
Let us return to the example ini file in the previous section:
[Config AlohaStudy]
*.numHosts = ${1, 2, 5, 10..50 step 10}
**.host[*].generationInterval = exponential( ${0.2, 0.4, 0.6}s )
The ${...} syntax specifies an iteration. It is sort of a macro: at each run, the whole ${...} string is textually replaced with the current iteration value. The values to iterate over do not need to be numbers (although the "a..b" and "a..b step c" forms only work on numbers), and the substitution takes place even inside string constants. So, the following examples are all valid (note that textual substitution is used):
*.param = 1 + ${1e-6, 1/3, sin(0.5)}
==> *.param = 1 + 1e-6
*.param = 1 + 1/3
*.param = 1 + sin(0.5)
*.greeting = "We will simulate ${1,2,5} host(s)."
==> *.greeting = "We will simulate 1 host(s)."
*.greeting = "We will simulate 2 host(s)."
*.greeting = "We will simulate 5 host(s)."
To write a literal ${..} inside a string constant, quote the left brace with a backslash: $\{..}.
- NOTE
Inside ${..}, the values are separated with commas. However, not every comma is taken as a value separator because the parser tries to be smart about what is meant. Commas inside (nested) parentheses, brackets or curly braces are ignored so that ${uniform(0,3)} is parsed as one value and not as uniform(0 plus 3). Commas, curly braces and other characters inside double-quoted string literals are also ignored, so ${"Hello, world"} yields a single "Hello, world" string and not "Hello plus world". It is assumed that string literals use backslash as an escape character, like in C/C++ and NED.
To include a literal comma or close-brace inside a value, one needs to escape it with a backslash: ${foo\,bar\}baz} will parse as a single value, foo,bar}baz. Backslashes themselves must be doubled. As the above examples illustrate, the parser removes one level of backslashes, except inside string literals where they are left intact.
10.4.2 Named Iteration Variables¶
One can assign names to iteration variables, which has the advantage that meaningful names will be displayed in the Cmdenv output instead of $0 and $1, and also lets one reference iteration variables at other places in the ini file. The syntax is ${<varname>=<iteration>}, and variables can be referred to simply as ${<varname>}:
[Config Aloha]
*.numHosts = ${N=1, 2, 5, 10..50 step 10}
**.host[*].generationInterval = exponential( ${mean=0.2, 0.4, 0.6}s )
**.greeting = "There are ${N} hosts"
The scope of the variable name is the section that defines it, plus sections based on that section (via extends).
10.4.2.1 Referencing Other Iteration Variables¶
Iterations may refer to other iteration variables, using the dollar syntax ($var) or the dollar-brace syntax (${var}).
This feature makes it possible to have loops where the inner iteration range depends on the outer one. An example:
**.foo = ${i=1..10} # outer loop
**.bar = ${j=1..$i} # inner loop depends on $i
When needed, the default top-down nesting order of iteration loops is modified (loops are reordered) to ensure that expressions only refer to more outer loop variables, but not to inner ones. When this is not possible, an error is generated with the “circular dependency” message.
For instance, in the following example the loops will be nested in k - i - j order, k being the outermost and j the innermost loop:
**.foo = ${i=0..$k} # must be inner to $k
**.bar = ${j=$i..$k} # must be inner to both $i and $k
**.baz = ${k=1..10} # may be the outermost loop
And the next example will stop with an error because there is no “good” ordering:
**.foo = ${i=0..$j}
**.bar = ${j=0..$k}
**.baz = ${k=0..$i} # --> error: circular references
Variables are substituted textually, and the result is normally not evaluated as an arithmetic expression. The result of the substitution is only evaluated where needed, namely in the three arguments of iteration ranges (from, to, step), and in the value of the constraint configuration option.
To illustrate textual substitution, consider the following contorted example:
**.foo = ${i=1..3, 1s+, -}001s
Here, the foo NED parameter will receive the following values in subsequent runs: 1001s, 2001s, 3001s, 1s+001s, -001s.
- CAUTION
Due to textual substitution, variables in arithmetic expressions should be protected with parentheses -- just like in C/C++ function-style macros. Consider the following example:
**.foo = ${i=10}
**.bar = ${j=$i+5}
**.baz = ${k=2*$j} # bogus! $j should be written as ($j)
constraint = $i+50 < 2*$j # ditto: should use ($i) and ($j)
Here, the baz parameter will receive the string 2*10+5 after the substitutions and hence evaluate to 25 instead of the correct 2*(10+5)=30; the constraint expression is similarly wrong. Mind the parens!
Substitution also works inside string constants within iterations (${..}).
**.foo = "${i=Jo}" # -> Jo
**.bar = ${"Hi $i", "Hi ${i}hn"} # -> Hi Jo /John
However, outside iterations the plain dollar syntax is not understood, only the dollar-brace syntax is:
**.foo = "${i=Day}"
**.baz = "Good $i" # -> remains "Good $i"
**.baz = "Good ${i}" # -> becomes "Good Day"
- Rationale
The text substitution model was chosen for greater flexibility as well as the ability to produce more consistent semantics. The advantages outweigh the inconvenience of having to parenthesize variable references in arithmetic expressions.
10.4.3 Parallel Iteration¶
The body of an iteration may end in an exclamation mark followed by the name of another iteration variable. This syntax denotes a parallel iteration. A parallel iteration does not define a loop of its own, but rather, the sequence is advanced in lockstep with the variable after the “!”. In other words, the “!” syntax chooses the kth value from the iteration, where k is the position (iteration count) of the iteration variable after the “!”.
An example:
**.plan = ${plan= "A", "B", "C", "D"}
**.numHosts = ${hosts= 10, 20, 50, 100 ! plan}
**.load = ${load= 0.2, 0.3, 0.3, 0.4 ! plan}
In the above example, the only loop is defined by the first line, the plan variable. The other two iterations, hosts and load just follow it; for the first value of plan the first values of hosts and load are selected, and so on.
10.4.4 Predefined Variables, Run ID¶
There are a number of predefined variables: ${configname} and ${runnumber} with the obvious meanings; ${network} is the name of the network that is simulated; ${processid} and ${datetime} expand to the OS process id of the simulation and the time it was started; and there are some more: ${runid}, ${iterationvars} and ${repetition}.
${runid} holds the run ID. When a simulation is run, a run ID is assigned that uniquely identifies that instance of running the simulation: every subsequent run of the same simulation will produce a different run ID. The run ID is generated as the concatenation of several variables like ${configname}, ${runnumber}, ${datetime} and ${processid}. This yields an identifier that is unique “enough” for all practical purposes, yet it is meaningful for humans. The run ID is recorded into result files written during the simulation, and can be used to match vectors and scalars written by the same simulation run.
10.4.5 Constraint Expression¶
In cases when not all combinations of the iteration variables make sense or need to be simulated, it is possible to specify an additional constraint expression. This expression is interpreted as a conditional (an “if” statement) within the innermost loop, and it must evaluate to true for the variable combination to generate a run. The expression should be given with the constraint configuration option. An example:
*.numNodes = ${n=10..100 step 10}
**.numNeighbors = ${m=2..10 step 2}
constraint = ($m) <= sqrt($n) # note: parens needed due to textual substitution
The expression syntax supports most C language operators including boolean, conditional and binary shift operations, and most <math.h> functions; data types are boolean, double and string. The expression must evaluate to a boolean.
- NOTE
Remember that variables are substituted textually into the expression, so they must be protected with parentheses to preserve evaluation order.
10.4.6 Repeating Runs with Different Seeds¶
It is directly supported to perform several runs with the same parameters but different random number seeds. There are two configuration options related to this: repeat and seed-set. The first one simply specifies how many times a run needs to be repeated. For example,
repeat = 10
causes every combination of iteration variables to be repeated 10 times, and the ${repetition} predefined variable holds the loop counter. Indeed, repeat=10 is equivalent to adding ${repetition=0..9} to the ini file. The ${repetition} loop always becomes the innermost loop.
The seed-set configuration key affects seed selection. Every simulation uses one or more random number generators (as configured by the num-rngs key), for which the simulation kernel can automatically generate seeds. The first simulation run may use one set of seeds (seed set 0), the second run may use a second set (seed set 1), and so on. Each set contains as many seeds as there are RNGs configured. All automatic seeds generate random number sequences that are far apart in the RNG's cycle, so they will never overlap during simulations.
- NOTE
Mersenne Twister, the default RNG of OMNeT++ has a cycle length of 219937, which is more than enough for any conceivable purpose.
The seed-set key tells the simulation kernel which seed set to use. It can be set to a concrete number (such as seed-set=0), but it usually does not make sense as it would cause every simulation to run with exactly the same seeds. It is more practical to set it to either ${runnumber} or to ${repetition}. The default setting is ${runnumber}:
seed-set = ${runnumber} # this is the default
This causes every simulation run to execute with a unique seed set. The second option is:
seed-set = ${repetition}
where all $repetition=0 runs will use the same seeds (seed set 0), all $repetition=1 runs use another seed set, $repetition=2 a third seed set, etc.
To perform runs with manually selected seed sets, one needs to define an iteration for the seed-set key:
seed-set = ${5,6,8..11}
In this case, the repeat key should be left out, as seed-set already defines an iteration and there is no need for an extra loop.
It is of course also possible to manually specify individual seeds for simulations. The parallel iteration feature is very convenient here:
repeat = 4
seed-1-mt = ${53542, 45732, 47853, 33434 ! repetition}
seed-2-mt = ${75335, 35463, 24674, 56673 ! repetition}
seed-3-mt = ${34542, 67563, 96433, 23567 ! repetition}
The meaning of the above is this: in the first repetition, the first column of seeds is chosen, for the second repetition, the second column, etc. The "!" syntax chooses the kth value from the iteration, where k is the position (iteration count) of the iteration variable after the "!". Thus, the above example is equivalent to the following:
# no repeat= line!
seed-1-mt = ${seed1 = 53542, 45732, 47853, 33434}
seed-2-mt = ${ 75335, 35463, 24674, 56673 ! seed1}
seed-3-mt = ${ 34542, 67563, 96433, 23567 ! seed1}
That is, the iterators of seed-2-mt and seed-3-mt are advanced in lockstep with the seed1 iteration.
10.4.7 Experiment-Measurement-Replication¶
We have introduced three concepts that are useful for organizing simulation results generated by batch executions or several batches of executions.
During a simulation study, a user prepares several experiments. The purpose of an experiment is to find out the answer to questions like "how does the number of nodes affect response times in the network?" For an experiment, several measurements are performed on the simulation model, and each measurement runs the simulation model with a different set of parameters. To eliminate the bias introduced by the particular random number stream used for the simulation, several replications of every measurement are run with different random number seeds, and the results are averaged.
OMNeT++ result analysis tools can take advantage of the experiment, measurement and replication labels recorded into result files, and display simulation runs and recorded results accordingly on the user interface.
These labels can be explicitly specified in the ini file using the experiment-label, measurement-label and replication-label config options. If they are missing, the default is the following:
experiment-label = "${configname}"
measurement-label = "${iterationvars}"
replication-label = "#${repetition},seed-set=<seedset>"
That is, the default experiment label is the configuration name; the measurement label is concatenated from the iteration variables; and the replication label contains the repeat loop variable and seed-set. Thus, for our first example the experiment-measurement-replication tree would look like this:
"PureAloha"--experiment
$N=1,$mean=0.2 -- measurement
#0, seed-set=0 -- replication
#1, seed-set=1
#2, seed-set=2
#3, seed-set=3
#4, seed-set=4
$N=1,$mean=0.4
#0, seed-set=5
#1, seed-set=6
...
#4, seed-set=9
$N=1,$mean=0.6
#0, seed-set=10
#1, seed-set=11
...
#4, seed-set=14
$N=2,$mean=0.2
...
$N=2,$mean=0.4
...
...
The experiment-measurement-replication labels should be enough to reproduce the same simulation results, given of course that the ini files and the model (NED files and C++ code) haven't changed.
Every instance of running the simulation gets a unique run ID. We can illustrate this by listing the corresponding run IDs under each repetition in the tree. For example:
"PureAloha"
$N=1,$mean=0.2
#0, seed-set=0
PureAloha-0-20070704-11:38:21-3241
PureAloha-0-20070704-11:53:47-3884
PureAloha-0-20070704-16:50:44-4612
#1, seed-set=1
PureAloha-1-20070704-16:50:55-4613
#2, seed-set=2
PureAloha-2-20070704-11:55:23-3892
PureAloha-2-20070704-16:51:17-4615
...
The tree shows that ("PureAloha", "$N=1,$mean=0.2", "#0, seed-set=0") was run three times. The results produced by these three executions should be identical, unless, for example, some parameter was modified in the ini file, or a bug got fixed in the C++ code.
The default way of generating the experiment/measurement/replication labels is useful and sufficient for the majority of simulation studies. However, it can be customized if needed. For example, here is a way to join two configurations into one experiment:
[Config PureAloha_Part1] experiment-label = "PureAloha" ... [Config PureAloha_Part2] experiment-label = "PureAloha" ...
Measurement and replication labels can be customized in a similar way, making use of named iteration variables, ${repetition}, ${runnumber} and other predefined variables. One possible benefit is to customize the generated measurement and replication labels. For example:
[Config PureAloha_Part1]
measurement = "${N} hosts, exponential(${mean}) packet generation interval"
One should be careful with the above technique though, because if some iteration variables are left out of the measurement labels, runs with all values of those variables will be grouped together to the same replications.
10.5 Configuring the Random Number Generators¶
The random number architecture of OMNeT++ was already outlined in section [7.3]. Here we'll cover the configuration of RNGs in omnetpp.ini.
10.5.1 Number of RNGs¶
The num-rngs configuration option sets the number of random number generator instances (i.e., random number streams) available for the simulation model (see [7.3]). Referencing an RNG number greater than or equal to this number (from a simple module or NED file) will cause a runtime error.
10.5.2 RNG Choice¶
The rng-class configuration option sets the random number generator class to be used. It defaults to "cMersenneTwister", the Mersenne Twister RNG. Other available classes are "cLCG32" (the "legacy" RNG of OMNeT++ 2.3 and earlier versions, with a cycle length of 231-2), and "cAkaroaRNG" (Akaroa's random number generator, see section [11.20]).
10.5.3 RNG Mapping¶
The RNG numbers used in simple modules may be arbitrarily mapped to the actual random number streams (actual RNG instances) from omnetpp.ini. The mapping allows for great flexibility in RNG usage and random number stream configuration -- even for simulation models that were not written with RNG awareness.
RNG mapping may be specified in omnetpp.ini. The syntax of configuration entries is the following.
[General] <modulepath>.rng-N = M # where N and M are numeric, M < num-rngs
This maps module-local RNG N to physical RNG M. The following example maps all gen module's default (N=0) RNG to physical RNG 1, and all noisychannel module's default (N=0) RNG to physical RNG 2.
[General] num-rngs = 3 **.gen[*].rng-0 = 1 **.noisychannel[*].rng-0 = 2
The value also allows expressions, including those containing index, parentIndex, and ancestorIndex(level). This allows things like assigning a separate RNG to each element of a module vector.
This mapping allows variance reduction techniques to be applied to OMNeT++ models, without any model change or recompilation.
10.5.4 Automatic Seed Selection¶
Automatic seed selection is used for an RNG if one does not explicitly specify seeds in omnetpp.ini. Automatic and manual seed selection can co-exist; for a particular simulation, some RNGs can be configured manually, and some automatically.
The automatic seed selection mechanism uses two inputs: the run number and the RNG number. For the same run number and RNG number, OMNeT++ always selects the same seed value for any simulation model. If the run number or the RNG number is different, OMNeT++ does its best to choose different seeds which are also sufficiently separated in the RNG's sequence so that the generated sequences don't overlap.
The run number can be specified either in omnetpp.ini (e.g. via the cmdenv-runs-to-execute option) or on the command line:
$ ./mysim -r 1 $ ./mysim -r 2 $ ./mysim -r 3
For the cMersenneTwister random number generator, selecting seeds
so that the generated sequences don't overlap is easy,
due to the extremely long sequence of the RNG.
The RNG is initialized from the 32-bit seed value seed = runNumber*numRngs + rngNumber.
(This implies that simulation runs participating in the study should have
the same number of RNGs set).
- [While (to our knowledge) no one has proven that the seeds 0,1,2,...
are well apart in the sequence, this is probably true, due to the extremely
long sequence of MT. The author would however be interested in papers
published about seed selection for MT.]
For the cLCG32 random number generator, the situation is more difficult, because the range of this RNG is rather short (231-1, about 2 billion). For this RNG, OMNeT++ uses a table of 256 pre-generated seeds, equally spaced in the RNG's sequence. Index into the table is calculated with the runNumber*numRngs + rngNumber formula. Care should be taken that one doesn't exceed 256 with the index, or it will wrap and the same seeds will be used again. It is best not to use the cLCG32 at all -- cMersenneTwister is superior in every respect.
10.5.5 Manual Seed Configuration¶
In some cases, one may want to manually configure seed values. The motivation for doing so may be the use of variance reduction techniques, or the intention to reuse the same seeds for several simulation runs.
To manually set seeds for the Mersenne Twister RNG, use the seed-k-mt option, where k is the RNG index. An example:
[General] num-rngs = 3 seed-0-mt = 12 seed-1-mt = 9 seed-2-mt = 7
For the now-obsolete cLCG32 RNG, the name of the corresponding option is seed-k-lcg32.
10.6 Logging¶
The OMNeT++ logging infrastructure provides a few configuration options that affect what is written to the log output. It supports configuring multiple filters: global compile-time, global runtime, and per-component runtime log level filters. For a log statement to actually produce output, it must pass each filter simultaneously. In addition, one can also specify a log prefix format string which determines the context information that is written before each log line. In the following sections, we look at how to configure logging.
10.6.1 Compile-Time Filtering¶
The COMPILETIME_LOGLEVEL macro determines which log statements are compiled into the executable. Any log statement which uses a log level below the specified compile-time log level is omitted. In other words, no matter how the runtime log levels are configured, such log statements are not even executed. This is mainly useful to avoid the performance penalty paid for log statements which are not needed.
#define COMPILETIME_LOGLEVEL LOGLEVEL_INFO EV_INFO << "Packet received successfully" << endl; EV_DEBUG << "CRC check successful" << endl;
In the above example, the output of the second log statement is omitted:
[INFO] Packet received successfully
If simulation performance is critical, and if there are lots of log statements in the code, it might be useful to omit all log statements from the executable. This can be very simply achieved by putting the following macro into effect for the compilation of all source files.
#define COMPILETIME_LOGLEVEL LOGLEVEL_OFF
On the other hand, if there's some hard-to-track-down issue, it might be useful to just do the opposite. Compiling with the lowest log level ensures that the log output contains as much information as possible.
#define COMPILETIME_LOGLEVEL LOGLEVEL_TRACE
By default, the COMPILETIME_LOGLEVEL macro is set to LOGLEVEL_TRACE if the code is compiled in debug mode (NDEBUG is not set). However, it is set to LOGLEVEL_DETAIL if the code is compiled in release mode (NDEBUG is set).
In fact, the COMPILETIME_LOG_PREDICATE macro is the most generic compile time predicate that determines which log statements are compiled into the executable. Mostly, there's no need to redefine this macro, but it can be useful sometimes. For example, one can do compile-time filtering for log categories by redefining this macro. By default, the COMPILETIME_LOG_PREDICATE macro is defined as follows:
#define COMPILETIME_LOG_PREDICATE(object, loglevel, category) \
(loglevel >= COMPILETIME_LOGLEVEL)
10.6.2 Runtime Filtering¶
The cLog::logLevel variable restricts during runtime which log statements produce output. By default, the global runtime log level doesn't filter logging, it is set to LOGLEVEL_TRACE. Although due to its global nature it's not really modular, nevertheless it's still allowed to change the value of this variable. It is mainly used in interactive user interfaces to implement efficient global filtering, but it may also be useful for various debugging purposes.
In addition to the global variable, there's also a per-component runtime log level which only restricts the output of a particular component of the simulation. By default, the runtime log level of all components is set to LOGLEVEL_TRACE. Programmatically, these log levels can be retrieved with cComponent::getLogLevel() and changed with cComponent::setLogLevel().
In general, any log statement which uses a log level below the specified global runtime log level, or below the specified per-component runtime log level, is omitted. If the log statement appears in a module source, then the module's per-component runtime log level is checked. In any other C++ code, the context module's per-component runtime log level is checked.
In fact, the cLog::noncomponentLogPredicate and the cLog::componentLogPredicate are the most generic runtime predicates that determine which log statements are executed. Mostly, there's no need to redefine these predicates, but it can be useful sometimes. For example, one can do runtime filtering for log categories by redefining them. To cite a real example, the cLog::componentLogPredicate function contains the following runtime checks:
return statementLogLevel >= cLog::loglevel &&
statementLogLevel >= sourceComponent->getLogLevel() &&
getEnvir()->isLoggingEnabled(); // for express mode
10.6.3 Log Prefix Format¶
The log prefix format is a string which determines the log prefix that is written before each log line. The format string contains constant parts interleaved with special format directives. The latter always start with the % character followed by another character that identifies the format directive. Constant parts are simply written to the output, while format directives are substituted at runtime with the corresponding data that is captured by the log statement.
The following is the list of predefined log prefix format directives. They are organized into groups based on what kind of information they provide.
Log statement related format directives:
- %l log level name
- %c log category
Current simulation state related format directives:
- %e current event number
- %t current simulation time
- %g current fingerprint if fingerprint verification is enabled in the configuration, otherwise empty
- %v current message or event name
- %a current message or event class name
- %n module name of current event
- %m module path of current event
- %o module class name of current event
- %s simple NED type name of module of current event
- %q fully qualified NED type name of module of current event
- %N context component name
- %M context component path
- %O context component class name
- %S context component NED type simple name
- %Q context component NED type fully qualified name
Simulation run related format directives:
- %G config name
- %R run number
- %X network module class name
- %Y network module NED type simple name
- %Z network module NED type fully qualified name
C++ source related (where the log statement is) format directives:
- %p source object pointer
- %b source object name
- %d source object path
- %z source class name
- %u source function name
- %x source component NED type simple name
- %y source component NED type fully qualified
- %f source file name
- %i source line number
Operating system related format directives:
- %w user time in seconds
- %W human readable wall time
- %H host name
- %I process id
Compound field format directives:
- %E event object (class name, name)
- %U module of current event (NED type, full path)
- %C context component (NED type, full path)
- %K context component, if different from current module (NED type, full path)
- %J source component or object (NED type or class, full path or pointer)
- %L source component or object, if different from context component (NED type or class, full path or pointer)
Padding format directives:
- %[0-9]+ add spaces until specified column
- %| adaptive tabstop: add padding until longest prefix seen so far
- %> function call depth times 2-space indentation (see Enter_Method, Enter_Method_Silent)
- %< remove preceding whitespace characters
Conditional format directives:
- %? ignore the following constant part if the preceding directive didn't print anything (useful for separators)
Escaping the % character:
- %% one % character
10.6.4 Configuring Logging in Cmdenv¶
In Cmdenv, logging can be configured using omnetpp.ini configuration options. The configured settings remain in effect during the whole simulation run unless overridden programmatically.
- cmdenv-output-file redirects standard output to a file
- cmdenv-log-prefix determines the log prefix of each line
- <object-full-path>.cmdenv-log-level restricts output on a per-component basis
By default, the log is written to the standard output but it can be redirected to a file. The output can be completely disabled from omnetpp.ini, so that it doesn't slow down simulation when it is not needed. The per-component runtime log level option must match the full path of the targeted component. The supported values for this configuration option are the following:
- off completely disables log output
- fatal omits log output below LOGLEVEL_FATAL
- error omits log output below LOGLEVEL_ERROR
- warn omits log output below LOGLEVEL_WARN
- info omits log output below LOGLEVEL_INFO
- detail omits log output below LOGLEVEL_DETAIL
- debug omits log output below LOGLEVEL_DEBUG
- trace completely enables log output
By default, the log prefix format is set to "[%l]\t". The default setting is intentionally quite simple to avoid cluttered standard output, it produces similar log output:
[INFO] Packet received successfully [DEBUG] CRC check successful
The log messages are aligned vertically because there's a TAB character in the format string. Setting the log prefix format to an empty string disables writing a log prefix altogether. Finally, here is a more detailed format string: "[%l]\t%C for %E: %|", it produces similar output:
[INFO] (IPv4)host.ip for (ICMPMessage)ping0: Pending (IPv4Datagram)ping0 [INFO] (ARP)host.arp for (ICMPMessage)ping0: Starting ARP resolution [DEBUG] (ARP)host.arp for (ICMPMessage)ping0: Sending (ARPPacket)arpREQ [INFO] (Mac)host.wlan.mac for (ARPPacket)arpREQ: Enqueing (ARPPacket)arpREQ
In express mode, for performance reasons, log output is disabled during the whole simulation. However, during the simulation finish stage, logging is automatically re-enabled to allow writing statistical and other results to the log. One can completely disable all logging by adding the following configuration option at the beginning of omnetpp.ini:
[General] **.cmdenv-log-level = off
Finally, the following is a more complex example that sets the per-component runtime log levels for all PHY components to LOGLEVEL_WARN, except for all MAC modules where it is set to LOGLEVEL_DEBUG, and for all other modules it is set LOGLEVEL_OFF.
[General] **.phy.cmdenv-log-level = warn **.mac.cmdenv-log-level = debug **.cmdenv-log-level = off
10.6.5 Configuring Logging in Qtenv¶
The graphical user interface Qtenv provides its own configuration dialog where the user can configure logging. This dialog offers setting the global runtime log level and the log prefix format string. The per-component runtime log levels can be set from the context menu of components. As in Cmdenv, it's also possible to set the log levels to off, effectively disabling logging globally or for specific components only.
In contrast to Cmdenv, setting the runtime log levels is possible even if the simulation is already running. This feature allows continuous control over the level of detail of what is written to the log output. For obvious reasons, changing the log levels has no effect back in time, so already written log content in the log windows will not change.
By default, the log prefix format is set to "%l %C: ", it produces similar log output:
INFO Network.server.wlan[0].mac: Packet received successfully DEBUG Network.server.wlan[0].mac: CRC check successful
11 Running Simulations¶
11.1 Introduction¶
This chapter presents the process of running simulations. It includes information on basic usage, user interfaces, running simulation campaigns, and various other topics.
11.2 Simulation Executables vs Libraries¶
As we have seen in the Build chapter, simulations can be compiled into an executable or a shared library. When the build output is an executable, it can be run directly. For example, the Fifo example simulation can be executed with the following command:
$ ./fifo
Simulations compiled into a shared library can be run using the opp_run program. For example, if we compiled the Fifo simulation into a shared library on Linux, the build output would be a libfifo.so file that can be executed with the following command:
$ opp_run -l fifo
The -l option instructs opp_run to load the specified shared library. The -l option will be explained in detail in section [11.9].
- NOTE
Normal simulation executables, like the aforementioned fifo, are also able to load additional shared libraries in the same manner. Moreover, opp_run is essentially just a specially-named simulation executable that does not include any model code.
11.3 Command-Line Options¶
The above commands illustrate just the simplest case. Usually, you will need to add extra command-line options. For example, to specify which ini file(s) to use, which configuration to run, which user interface to activate, where to load NED files from, and so on. The rest of this chapter will cover these options.
To get a complete list of command-line options accepted by simulations, run the opp_run program (or any other simulation executable) with -h:
$ opp_run -h
Or:
$ ./fifo -h
11.4 Configuration Options on the Command Line¶
Configuration options can also be specified on the command line, not only in ini files. To do so, prefix the option name with a double dash and append the value with an equal sign. Make sure not to have spaces around the equal sign. If the value contains spaces or shell metacharacters, you'll need to protect the value (or the whole option) with quotes or apostrophes.
Example:
$ ./fifo --debug-on-errors=true
If an option is specified both on the command line and in an ini file, the command line takes precedence.
To get the list of all possible configuration options, use the -h config option. (The additional -s option below just makes the output less verbose.)
$ opp_run -s -h config Supported configuration options: **.bin-recording=<bool>, default:true; per-object setting check-signals=<bool>, default:true; per-run setting cmdenv-autoflush=<bool>, default:false; per-run setting cmdenv-config-name=<string>; global setting ...
To see the option descriptions as well, use -h configdetails.
$ opp_run -h configdetails
11.5 Specifying Ini Files¶
The default ini file is omnetpp.ini and is loaded if no other ini file is specified on the command line.
Ini files can be specified either as plain arguments or with the -f option. Therefore, the following two commands are equivalent:
$ ./fifo experiment.ini common.ini $ ./fifo -f experiment.ini -f common.ini
Multiple ini files can be provided, and their contents will be merged. This allows for partitioning the configuration into separate files, such as simulation options, module parameters, and result recording options.
11.6 Specifying the NED Path¶
NED files are loaded from directories listed on the NED path. More precisely, they are loaded from the listed directories and their entire subdirectory trees. Directories are separated with a semicolon (;).
- NOTE
A semicolon is used as a separator on both Unix and Windows.
The NED path can be specified in several ways:
- by using the NEDPATH environment variable
- by using the -n command-line option
- in ini files, with the ned-path configuration option
The NED path resolution rules are as follows:
- OMNeT++ checks for the NED path specified on the command line with the -n option
- If not found on the command line, it checks for the NEDPATH environment variable
- The ned-path option value from the ini file is appended to the result of the above steps
- If the result is still empty, it falls back to "." (the current directory)
11.7 Selecting a User Interface¶
OMNeT++ simulations can be run under different user interfaces, also known as runtime environments. Currently, the following user interfaces are supported:
- Qtenv: Qt-based graphical user interface, available since OMNeT++ 5.0
- Cmdenv: command-line user interface for batch execution
You would typically test and debug your simulation under Qtenv, then run actual simulation experiments from the command line or shell script, using Cmdenv. Qtenv is also better suited for educational and demonstration purposes.
User interfaces are provided in the form of libraries that can be linked statically,
dynamically, or loaded at runtime.
- [Via the -l
option, see section [11.9]]
You can explicitly select a user interface on the command line with the -u option (specify Qtenv or Cmdenv as its argument), or by adding the user-interface option to the configuration. If both the config option and the command line option are present, the command line option takes precedence.
Since the graphical interfaces are the default (have higher priority), the most common use of the -u option is to select Cmdenv, e.g., for batch execution. The following example performs all runs of the Aloha example simulation using Cmdenv:
$ ./aloha -c PureAlohaExperiment -u Cmdenv
11.8 Selecting Configurations and Runs¶
All user interfaces support the -c <configname> and -r <runfilter> options for selecting which simulation(s) to run.
The -c option expects the name of an ini file configuration as an argument. The -r option may be needed when the configuration expands to multiple simulation runs. That is the case when the configuration defines a parameter study (see section [10.4]), or when it contains a repeat configuration option that prescribes multiple repetitions with different RNG seeds (see section [10.4.6]). The -r option can then be used to select a subset of all runs (or one specific run, for that matter). A missing -r option selects all runs in the given configuration.
It depends on the particular user interface how it interprets the -c and -r options. Cmdenv performs all selected simulation runs (optionally stopping after the first one that finishes with an error). GUI interfaces like Qtenv may use this information to fill the run selection dialog (or to set up the simulation automatically if there is only one matching run.)
11.8.1 Run Filter Syntax¶
The run filter accepts two syntaxes: a comma-separated list of run numbers or run number ranges (for example 1,2,5-10), or an arithmetic expression. The arithmetic expression is similar to constraint expressions in the configuration (see section [10.4.5]). It may refer to iteration variables and to the repeat counter with the dollar syntax: $numHosts, $repetition. An example: $numHosts>10 && $mean==2.
Note that due to the presence of the dollar sign (and spaces), the expression should be protected against shell expansion, e.g. using apostrophes:
$ ./aloha -c PureAlohaExperiment -r '$numHosts>10 && $mean<2'
Or, with double quotes:
$ ./aloha -c PureAlohaExperiment -r "\$numHosts>10 && \$mean<2"
11.8.2 The Query Option¶
The -q (query) option complements -c and -r, and allows one to list the runs matched by the run filter. -q expects an argument that defines the format and verbosity of the output. Several formats are available: numruns, runnumbers, runs, rundetails, runconfig. Use opp_run -h to get a complete list.
-q runs prints one line of information with the iteration variables about each run that the run filter matches. An example:
$ ./aloha -s -c PureAlohaExperiment -r '$numHosts>10 && $mean<2' -q runs Run 14: $numHosts=15, $mean=1, $repetition=0 Run 15: $numHosts=15, $mean=1, $repetition=1 Run 28: $numHosts=20, $mean=1, $repetition=0 Run 29: $numHosts=20, $mean=1, $repetition=1
The -s option just makes the output less verbose.
If you need more information, use -q rundetails or -q runconfig. rundetails is like numruns, but it also prints the values of the iteration variables and a summary of the configuration (the expanded values of configuration entries that contain iteration variables) for each matching run:
$ ./aloha -s -c PureAlohaExperiment -r '$numHosts>10 && $mean<2' -q rundetails
Run 14: $numHosts=15, $mean=1, $repetition=0
Aloha.numHosts = 15
Aloha.host[*].iaTime = exponential(1s)
Run 15: $numHosts=15, $mean=1, $repetition=1
Aloha.numHosts = 15
Aloha.host[*].iaTime = exponential(1s)
...
The numruns and runnumbers formats are mainly intended for use in scripts. They just print the number of matching runs and the plain run number list, respectively.
$ ./aloha -s -c PureAlohaExperiment -r '$numHosts>10 && $mean<2' -q numruns 4 $ ./aloha -s -c PureAlohaExperiment -r '$numHosts>10 && $mean<2' -q runnumbers 14 15 28 29
The -q option encapsulates some unrelated functionality, as well: -q sectioninheritance ignores -r, and prints the inheritance chain of the inifile sections (the inheritance graph after linearization) for the configuration denoted by -c.
11.9 Loading Extra Libraries¶
OMNeT++ allows you to load shared libraries at runtime. These shared libraries may contain model code (e.g. simple module implementation classes), dynamically registered classes that extend the simulator's functionality (for example, NED functions, result filters/recorders, figure types, schedulers, output vector/scalar writers, Qtenv inspectors, or even custom user interfaces), or other code.
- HINT
Building shared libraries and loading them dynamically has several advantages over static linking or building executables. Advantages include modularity, reduced build times (compared to statically linking a huge executable), and better reuse (being able to use the same library in several projects without changing it).
Libraries can be specified with the -l <libraryname> command line option (there can be several -l's on the command line), or with the load-libs configuration option. The values from the command line and the config file will be merged.
The prefix and suffix from the library name can be omitted (the extensions .dll, .so, .dylib, and also the common lib prefix on Unix systems). This means that you can specify the library name in a platform-independent way: if you specify -l foo, then OMNeT++ will look for foo.dll, libfoo.dll, libfoo.so, or libfoo.dylib, depending on the platform.
OMNeT++ will use the dlopen() or LoadLibrary() system call to load the library. To ensure that the system call finds the file, either specify the library name with a full path (pre- and postfixes of the library file name can still be omitted), or adjust the shared library path environment variable of your OS: PATH on Windows, LD_LIBRARY_PATH on Unix, and DYLD_LIBRARY_PATH on Mac OS X.
- NOTE
Runtime loading is not needed if your executable or shared lib was already linked against the library in question. In that case, the platform's dynamic loader will automatically load the library.
11.10 Stopping Condition¶
The most common way of specifying when to finish the simulation is to set a time limit. There are several time limits that can be set with the following configuration options:
- sim-time-limit : Limits the duration for which the simulation should run (in simulation time).
- cpu-time-limit : Limits the maximum CPU time that the simulation can use.
- real-time-limit : Limits the actual duration of the simulation (in real time).
- NOTE
Although cpu-time-limit and real-time-limit may appear similar, in practice, cpu-time-limit is almost always needed. Its alternative, real-time-limit, simply measures elapsed time (wall-clock interval) and does not indicate how many cycles the CPU has spent running the simulation. On a heavily overloaded system where the CPU is shared among a number of computationally intensive jobs, real-time-limit may prematurely stop your simulation.
Here is an example:
$ ./fifo --sim-time-limit=500s
If multiple time limits are set simultaneously, the simulation will stop when the first one is reached.
If necessary, the simulation can also be stopped programmatically, for example when the results of a steady-state simulation have reached the desired accuracy. This can be achieved by calling the endSimulation() method.
11.11 Controlling the Output¶
The following options can be used to enable/disable the creation of various output files during simulation.
- record-eventlog : Turns on the recording of simulator
events into an event log file. The resulting .elog file can be
analyzed later in the IDE with the Sequence Chart tool.
- scalar-recording : This option is originally a
per-object setting, intended for selectively turning on or off the
recording of certain scalar results. However, when it is specified
globally to turn off all scalars, no output scalar file
(.sca) will be created either.
- vector-recording : Similar to scalar-recording,
this option can be used to turn off creating an output vector file
(.vec).
- cmdenv-redirect-output : This is a Cmdenv-specific option, only mentioned here for completeness. It tells Cmdenv to save its standard output to files, one file per run. This option is mainly helpful when running simulation batches.
These configuration options, like any others, can be specified both in ini files and on the command line. An example:
$ ./fifo --record-eventlog=true --scalar-recording=false --vector-recording=false
11.12 Debugging¶
Debugging is a task that arises often during model development. The following configuration options are related to C++ debugging:
- debug-on-errors : If the runtime detects any errors, it will
trigger a debugger trap (programmatic breakpoint) so you will be able to check
the location and context of the problem in your debugger. This option does not
start a debugger; the simulation must already have been launched under a
debugger.
- debugger-attach-on-error : Controls just-in-time debugging.
When this option is enabled and an error occurs during simulation, the
simulation program will launch an external debugger and have it attached to
the simulation process. Related configuration options are
debugger-attach-on-startup, debugger-attach-command and
debugger-attach-wait-time.
- HINT
Just-in-time debugging is useful when trying to debug a rarely occurring crash in a large simulation batch or in cases where the simulation is started from a script or another program that cannot be easily modified to start the simulation in a debugger.
An example that launches the simulation under the gdb debugger:
$ gdb --args ./aloha --debug-on-errors=true
11.13 Debugging Leaked Messages¶
The most common cause of memory leaks in OMNeT++ simulations is forgetting to delete messages. When this happens, the simulation process will continually grow in size as the simulation progresses, and when left to run long enough, it will eventually cause an out-of-memory condition.
Luckily, this problem is easy to identify, as all user interfaces display the number of message objects currently in the system. Take a look at the following example Cmdenv output:
...
** Event #1908736 t=58914.051870113485 Elapsed: 2.000s (0m 02s)
Speed: ev/sec=954368 simsec/sec=29457 ev/simsec=32.3987
Messages: created: 561611 `\tbf{present:\ 21}` in FES: 34
** Event #3433472 t=106067.401570204991 Elapsed: 4.000s (0m 04s)
Speed: ev/sec=762368 simsec/sec=23576.7 ev/simsec=32.3357
Messages: created: 1010142 `\tbf{present:\ 354}` in FES: 27
** Event #5338880 t=165025.763387178965 Elapsed: 6.000s (0m 06s)
Speed: ev/sec=952704 simsec/sec=29479.2 ev/simsec=32.3179
Messages: created: 1570675 `\tbf{present:\ 596}` in FES: 21
** Event #6850304 t=211763.433233042017 Elapsed: 8.000s (0m 08s)
Speed: ev/sec=755712 simsec/sec=23368.8 ev/simsec=32.3385
Messages: created: 2015318 `\tbf{present:\ 732}` in FES: 38
** Event #8753920 t=270587.781554343184 Elapsed: 10.000s (0m 10s)
Speed: ev/sec=951808 simsec/sec=29412.2 ev/simsec=32.361
Messages: created: 2575634 `\tbf{present:\ 937}` in FES: 32
** Event #10270208 t=317495.244698246477 Elapsed: 12.000s (0m 12s)
Speed: ev/sec=758144 simsec/sec=23453.7 ev/simsec=32.3251
Messages: created: 3021646 `\tbf{present:\ 1213}` in FES: 20
...
The interesting parts are in bold font. The steadily increasing numbers are an indication that the simulation model, i.e. one or more modules in it, are missing some delete msg calls. It is best to use Qtenv to narrow down the issue to specific modules and/or message types.
Qtenv is also able to display the number of messages currently in the simulation. The numbers are displayed on the status bar. If you find that the number of messages is steadily increasing, you need to find where the message objects are located. This can be done with the help of the Find/Inspect Objects dialog.
If the simulation is leaking objects derived from cOwnedObject, these can also be located using the Find/Inspect Objects dialog. For other types of memory leaks, Qtenv cannot help in identifying the source of the issue.
11.14 Debugging Other Memory Problems¶
Technically, memory leaks are only a subset of problems associated with memory allocations, i.e., the usage of new and delete in C++.
- Memory leaks, which means forgetting to delete objects or memory blocks no longer used, usually just prevent the user from being able to run the simulation program long enough.
- Dereferencing dangling pointers, i.e., accessing an already deleted object or memory block (or trying to delete one for a second time), usually results in a crash.
- Heap corruption, caused by e.g., writing past the end of an allocated array, usually also results in a crash.
There are specialized tools that can help track down memory allocation problems (memory leak, double-deletion, referencing deleted blocks, etc.). Some of these tools are listed below.
- Valgrind: This tool continues to be a widely used tool for memory debugging, profiling, and leak detection on Linux platforms. It is based on CPU emulation.
- AddressSanitizer, LeakSanitizer, and several other sanitizer tools are part of the LLVM/Clang project. AddressSanitizer is a fast memory error detector that addresses memory leaks, out-of-bounds accesses, and use-after-free bugs. LeakSanitizer specializes in memory leak detection and can be used alongside AddressSanitizer or independently. These tools are based on code instrumentation, meaning that to enable them, the codebase must be compiled with special options. OMNeT++ makefiles offer a compile mode (MODE=sanitize) that builds the OMNeT++ libraries and simulations with a selected subset of these tools enabled.
- There are several commercial offerings as well, e.g., IBM Rational PurifyPlus and Insure++.
11.15 Profiling¶
When a simulation runs correctly but is too slow, you might want to profile it. Profiling basically means collecting runtime information about how much time is spent at various parts of the program, in order to find places where optimizing the code would have the most impact.
However, there are a few other options you can try before resorting to profiling and optimizing. First, verify that it is the simulation itself that is slow. Make sure features like eventlog recording are not accidentally turned on. Run the simulation under Cmdenv to eliminate any possible overhead from Qtenv. If you must run the simulation under Qtenv, you can still gain speed by disabling animation features, closing all inspectors, hiding UI elements like the timeline, and so on.
Also, compile your code in release mode (with make MODE=release, see [9.2.3]) instead of debug. That can make a huge difference, especially with heavily templated code.
- HINT
If you decide to optimize the program, we recommend that you don't skip the profiling step. Even for experienced programmers, a profiling session is often full of surprises, and CPU time is spent in other places than one would expect.
Some profiling software:
- Debuggers: A simple but effective method of profiling involves the use of debuggers for manual statistical profiling. This technique includes periodically stopping the program in a debugger to examine the stack trace and identifying frequent stopping points which may indicate performance bottlenecks.
- Sysprof: An effective system profiler for Linux that captures and analyzes system-wide profiles to help identify system activity and performance bottlenecks. The user interface allows filtering for specific processes, such as the simulation process to be profiled.
- Valgrind/KCachegrind: KCachegrind visualizes traces generated by Valgrind and its Callgrind tool on Linux. These tools are free and open-source, commonly included in Linux distributions.
- Intel VTune Profiler: Offers advanced profiling capabilities across different platforms, aiding in application performance, system performance, and configuration optimization.
- gprof: The GNU profiler, which analyzes performance of C and C++ programs by collecting and visualizing data on function call frequencies and execution times.
- Commercial C/C++ Profilers: Relevant commercial software products include IBM Rational PurifyPlus and Parasoft C/C++test.
11.16 Checkpointing¶
Debugging long-running simulations can be challenging as it often requires running the simulation for extended periods before reaching the point of failure and commencing debugging.
Checkpointing can significantly simplify the debugging process by enabling the creation of snapshots of the program's state, allowing for the resumption of execution from these checkpoints, even multiple times. Unfortunately, OMNeT++ does not natively include checkpointing functionality. However, this capability is available through external tools. It should be noted that restoring GUI windows is typically not supported by these tools.
Currently, the dominant and actively maintained checkpointing software on Linux
is CRIU (Checkpoint/Restore In Userspace). CRIU offers a user-space
checkpointing library, which has gained widespread adoption due to its
reliability and continued development.
- [Other checkpointing packages
include BLCR (Berkeley Lab Checkpoint/Restart) and DMTCP (Distributed
MultiThreaded Checkpointing), but these tools have become obsolete and have not
received updates for several years.]
Furthermore, it is worth mentioning that Docker and its underlying technologies also incorporate a checkpoint and restore mechanism, providing additional options for checkpointing long-running applications.
An example session with CRIU:
$ ./aloha -u Cmdenv -c PureAloha2 --cmdenv-redirect-output=true & $ pid=$! # remember process ID ... ... $ mkdir checkpoint1 $ sudo criu --shell-job dump -t $pid -D ./checkpoint1 ... ... $ sudo criu --shell-job restore -D ./checkpoint1
11.17 Using Cmdenv¶
Cmdenv is a lightweight, command line user interface that compiles and runs on all platforms. Cmdenv is primarily designed for batch execution.
Cmdenv simply executes one or more simulation runs that are described in the configuration file. The runs to be executed can be passed via command-line arguments or configuration options.
Cmdenv runs simulations in the same process. This means that if one simulation run writes to a global variable, subsequent runs will also see the change. This is one reason why the use of global variables in models is strongly discouraged.
11.17.1 Sample Output¶
When you run the Fifo example under Cmdenv, you should see something like this:
$ ./fifo -u Cmdenv -c Fifo1
OMNeT++ Discrete Event Simulation (C) 1992-2017 Andras Varga, OpenSim Ltd.
Version: 5.0, edition: Academic Public License -- NOT FOR COMMERCIAL USE
See the license for distribution terms and warranty disclaimer
Setting up Cmdenv...
Loading NED files from .: 5
Preparing for running configuration Fifo1, run #0...
Scenario: $repetition=0
Assigned runID=Fifo1-0-20090104-12:23:25-5792
Setting up network 'FifoNet'...
Initializing...
Initializing module FifoNet, stage 0
Initializing module FifoNet.gen, stage 0
Initializing module FifoNet.fifo, stage 0
Initializing module FifoNet.sink, stage 0
Running simulation...
** Event #1 t=0 Elapsed: 0.000s (0m 00s) 0% completed
Speed: ev/sec=0 simsec/sec=0 ev/simsec=0
Messages: created: 2 present: 2 in FES: 1
** Event #232448 t=11719.051014922336 Elapsed: 2.003s (0m 02s) 3% completed
Speed: ev/sec=116050 simsec/sec=5850.75 ev/simsec=19.8351
Messages: created: 58114 present: 3 in FES: 2
...
** Event #7206882 t=360000.52066583684 Elapsed: 78.282s (1m 18s) 100% completed
Speed: ev/sec=118860 simsec/sec=5911.9 ev/simsec=20.1053
Messages: created: 1801723 present: 3 in FES: 2
<!> Simulation time limit reached -- simulation stopped.
Calling finish() at the end of Run #0...
End.
As Cmdenv runs the simulation, it periodically prints the sequence number of the current event, the simulation time, the elapsed (real) time, and the performance of the simulation (how many events are processed per second). The first two values are 0 because there wasn't enough data for them to calculate yet. At the end of the simulation, the finish() methods of the simple modules are executed, and the outputs from them are displayed.
11.17.2 Selecting Runs, Batch Operation¶
The most important command-line options for Cmdenv are -c and -r, which are used to select which simulations to perform. (These options were described in section [11.8].) There are also equivalent configuration options that can be written in files: cmdenv-config-name and cmdenv-runs-to-execute.
Another configuration option, cmdenv-stop-batch-on-error, controls Cmdenv's behavior when performing multiple runs. It determines whether Cmdenv should stop after the first run that finishes with an error. By default, it does stop.
When performing multiple runs, Cmdenv prints run statistics at the end. Example output:
$ ./aloha -c PureAlohaExperiment -u Cmdenv ... Run statistics: total 42, successful 30, errors 1, skipped 11
11.17.3 Express Mode¶
Cmdenv can execute simulations in two modes:
- Normal (non-express) mode is for debugging. Detailed information will be written to the standard output (event banners, module log, etc).
- Express mode can be used for long simulation runs. Only periodic status updates are displayed about the progress of the simulation.
The default mode is Express. To turn off Express mode, specify false for the cmdenv-express-mode configuration option:
$ ./fifo -u Cmdenv -c Fifo1 --cmdenv-express-mode=false
There are several other options that also affect Express-mode and Normal-mode behavior:
- For Express mode: cmdenv-performance-display, cmdenv-status-frequency
- For Normal mode: cmdenv-event-banners, cmdenv-event-banner-details, cmdenv-log-level, cmdenv-log-prefix, etc.
See Appendix [27] for more information about these options.
11.17.3.1 Interpreting Express-Mode Output¶
When the simulation is running in Express mode with detailed performance display enabled (cmdenv-performance-display=true), Cmdenv periodically outputs a three-line status report about the progress of the simulation. The output looks like this:
...
** Event #250000 t=123.74354 ( 2m 3s) Elapsed: 0m 12s
Speed: ev/sec=19731.6 simsec/sec=9.80713 ev/simsec=2011.97
Messages: created: 55532 present: 6553 in FES: 8
** Event #300000 t=148.55496 ( 2m 28s) Elapsed: 0m 15s
Speed: ev/sec=19584.8 simsec/sec=9.64698 ev/simsec=2030.15
Messages: created: 66605 present: 7815 in FES: 7
...
The first line of the status display (beginning with **) contains:
- How many events have been processed so far
- The current simulation time (t)
- The elapsed time (wall clock time) since the beginning of the simulation run.
The second line displays simulation performance metrics:
- ev/sec indicates performance, i.e., how many events are processed in one real-time second. This value depends on the hardware (faster CPUs can process more events per second) and on the complexity (amount of calculations) associated with processing one event. For example, protocol simulations tend to require more processing per event than queueing networks, thus the latter produce higher ev/sec values. This value is largely independent of the size of the model, i.e., the number of modules in it.
- simsec/sec shows the relative speed of the simulation, i.e., how fast the simulation is progressing compared to real-time. It indicates how many simulated seconds can be processed in one real-second. This value virtually depends on everything: the hardware, the size of the simulation model, the complexity of events, and the average simulation time between events.
- ev/simsec is the event density, i.e., how many events are there per simulated second. Event density only depends on the simulation model, regardless of the hardware used to simulate it. For example, in a high-speed optical network simulation, this value will be very high (109), whereas in a call center simulation this value is probably well under 1. It also depends on the size of your model: if you double the number of modules in your model, you can expect the event density to double.
The third line displays the number of messages, which is an important indicator of the “health” of your simulation.
- Created: the total number of message objects created since the beginning of the simulation run. This does not mean that this many message objects actually exist because some (many) of them may have been deleted since then. It also does not mean that you created all those messages -- the simulation kernel also creates messages for its own use (e.g. to implement wait() in an activity() simple module).
- Present: the number of message objects currently present in the simulation model, i.e., the number of messages created (see above) minus the number of messages already deleted. This number includes the messages in the Future Event Set (FES).
- In FES: the number of messages currently scheduled in the Future Event Set.
The second value, the number of messages present, is more useful than perhaps initially thought. It can be an indicator of the “health” of the simulation. If it is steadily growing, then either you have a memory leak and are losing messages (which indicates a programming error), or the network you simulate is overloaded and the queues are steadily filling up (which might indicate wrong input parameters).
Of course, if the number of messages does not increase, it does not mean that you do not have a memory leak (other memory leaks are also possible). Nevertheless, the value is still useful because the most common way of leaking memory in a simulation is by not deleting messages.
11.17.4 Other Options¶
Cmdenv has more configuration options than mentioned in this section. See the options beginning with cmdenv- in Appendix [27] for the complete list.
11.18 The Qtenv Graphical User Interface¶
Qtenv is a graphical user interface for running simulations. Qtenv supports interactive simulation execution, animation, tracing, and debugging. Qtenv is recommended in the development stage of a simulation and for presentation purposes, as it allows one to obtain a detailed picture of the simulation state at any point of execution and to follow what happens inside the network. Note that 3D visualization support and smooth animation support are only available in Qtenv.
- NOTE
This section only covers the command-line and configuration options of Qtenv; the user interface is described in the Qtenv chapter of the OMNeT++ User Guide.
11.18.1 Command-Line and Configuration Options¶
Simulations running under Qtenv accept all general command-line and configuration options, including -c and -r. The configuration options specific to Qtenv include:
- qtenv-default-config: Specifies which config Qtenv should
automatically set up on startup. The default is to ask the user. This option
is equivalent to the -c command-line option.
- qtenv-default-run: Specifies which run (of the default config,
see qtenv-default-config) Qtenv should automatically set up on startup. The
default is to ask the user. This option is equivalent to the -r
command-line option.
- qtenv-extra-stack: Specifies the additional amount of stack that is reserved for each activity() simple module when the simulation is run under Qtenv.
Qtenv is also affected by the following option:
- image-path: Specifies the path for loading module icons.
See Appendix [27] for the list of possible configuration options.
11.19 Running Simulation Campaigns¶
Once your model works reliably, you will usually want to run several simulations, either to explore the parameter space via a parameter study (see section [10.4]) or to do multiple repetitions with different RNG seeds to increase the statistical accuracy of the results (see section [10.4.6]).
In this section, we will explore several ways to run batches of simulations efficiently.
11.19.1 The Naive Approach¶
Assume that you want to run the parameter study in the Aloha example simulation for the numHosts>15 cases.
The first idea is that Cmdenv is capable of running simulation batches. The following command will do the job:
$ ./aloha -u Cmdenv -c PureAlohaExperiment -r '$numHosts>15' ... Run statistics: total 14, successful 14 End.
This works fine. However, this approach has some drawbacks which become apparent when running hundreds or thousands of simulation runs.
- It uses only one CPU. In the age of multi-core CPUs, this is not very efficient.
- It is more prone to C++ programming errors in the model. A failure in a single run may abort execution (segfault) or corrupt the process state, possibly invalidating the results of subsequent runs.
To address the second drawback, we can execute each simulation run in its own Cmdenv instance.
$ ./aloha -c PureAlohaExperiment -r '$numHosts>15' -s -q runnumbers 28 29 30 31 32 33 34 35 36 37 38 39 40 41 $ ./aloha -u Cmdenv -c PureAlohaExperiment -r 28 $ ./aloha -u Cmdenv -c PureAlohaExperiment -r 29 $ ./aloha -u Cmdenv -c PureAlohaExperiment -r 30 ... $ ./aloha -u Cmdenv -c PureAlohaExperiment -r 41
It's a lot of commands to issue manually, but luckily they can be automated with a shell script like this:
#! /bin/sh
RUNS=$(./aloha -c PureAlohaExperiment -r '$numHosts>15' -s -q runnumbers)
for i in $RUNS; do
./aloha -u Cmdenv -c PureAlohaExperiment -r $i
done
Save the above into a text file called runAloha. Then give it executable permission, and run it:
$ chmod +x runAloha $ ./runAloha
It will execute the simulations one-by-one, each in its own Cmdenv instance.
This approach involves a process start overhead for each simulation. Normally, this overhead is small compared to the time spent simulating. However, it may become more of a problem when running a large number of very short simulations (<<1s in CPU time). This effect may be mitigated by letting Cmdenv do several (e.g. 10) simulations in one go.
And then, the script still uses only one CPU. It would be better to keep all CPUs busy. For example, if you have 8 CPUs, there should be eight processes running all the time -- when one terminates, another would be launched in its place. You might notice that this behavior is similar to what GNU Make's -j<numJobs> option does. The opp_runall utility, to be covered in the next section, exploits GNU Make to schedule the running of simulations on multiple CPUs.
11.19.2 Using opp_runall¶
OMNeT++ has a utility program called opp_runall, which allows you to execute simulations using multiple CPUs and multiple processes.
opp_runall groups simulation runs into batches. Every batch corresponds to a Cmdenv process, that is, runs of a batch execute sequentially inside the same Cmdenv process. Batches (i.e. Cmdenv instances) are scheduled for running so that they keep all CPUs busy. The batch size as well as the number of CPUs to use have sensible defaults but can be overridden.
11.19.2.1 Command Line¶
opp_runall expects the normal simulation command in its argument list. The first positional (non-option) argument and all following arguments are treated as the simulation command (simulation program and its arguments).
Thus, to modify a normal Cmdenv simulation command to make use of multiple CPUs, simply prefix it with opp_runall:
$ opp_runall ./aloha -u Cmdenv -c PureAlohaExperiment -r '$numHosts>15'
Options intended for opp_runall should come before the simulation command. These options include -b<N> for specifying the batch size, and -j<N> to specify the number of CPUs to use.
$ opp_runall -j8 -b4 ./aloha -u Cmdenv -c PureAlohaExperiment -r '$numHosts>15'
11.19.2.2 How It Works¶
First, opp_runall invokes the simulation command with extra command arguments (-s -q runnumbers) to figure out the list of runs it needs to perform, and groups the run numbers into batches. Then it exploits GNU make and its -j<N> option to do the heavy lifting. Namely, it generates a temporary makefile that allows make to run batches in parallel, and invokes make with the appropriate -j option. It is also possible to export the makefile for inspection and/or running it manually.
To illustrate the above, here is the content of such a makefile:
#
# This makefile was generated with the following command:
# opp_runall -j2 -b4 -e tmp ./aloha -u Cmdenv -c PureAlohaExperiment -r $numHosts>15
#
SIMULATIONCMD = ./aloha -u Cmdenv -c PureAlohaExperiment -s \
--cmdenv-redirect-output=true
TARGETS = batch0 batch1 batch2 batch3
.PHONY: $(TARGETS)
all: $(TARGETS)
@echo All runs completed.
batch0:
$(SIMULATIONCMD) -r 28,29,30,31
batch1:
$(SIMULATIONCMD) -r 32,33,34,35
batch2:
$(SIMULATIONCMD) -r 36,37,38,39
batch3:
$(SIMULATIONCMD) -r 40,41
11.19.3 Exploiting Clusters¶
With large scale simulations, using one's own desktop computer might not be enough. The solution could be to run the simulation on remote machines, that is, to employ a computing cluster.
In simple setups, cross-mounting the file system that contains OMNeT++ and the model, and using ssh to run the simulations might already provide a good solution.
In other cases, submitting simulation jobs and harvesting the results might be done via batch-queuing, cluster computing or grid computing middleware. The following list contains some pointers to such software:
- HTCondor, previously called Condor, is an open source software package that enables High Throughput Computing (HTC) on large collections of distributively owned computing resources. HTCondor can manage a dedicated cluster of workstations, and it can also harness non-dedicated, preexisting resources under distributed ownership. A user can submit jobs to HTCondor. HTCondor finds an available machine on the network and begins running the job on that machine. HTCondor also supports checkpointing and migrating jobs.
- Open Grid Scheduler/Grid Engine is a commercially supported open-source batch-queuing system for distributed resource management. OGS/GE is based on Sun Grid Engine (SGE), and maintained by the same group of external (i.e. non-Sun) developers who started contributing code since 2001. There is also a commercial SGE successor, Univa Grid Engine, formerly called Oracle Grid Engine.
- Slurm Workload Manager, or Slurm, is a free and open-source job scheduler for Linux and Unix-like kernels, used by many of the world's supercomputers and computer clusters.
- Apple's Xgrid has unfortunately been removed from Mac OS X with the release of Mountain Lion (2012). Xgrid was distributed computing for the masses -- easy, plug and play, not complicated. You could network your Mac computers together, and use that power on one computer to do something that took a lot of computing power. Currently, Pooch is advertised as software providing the easiest way to assemble and operate a high-performance parallel computer from Macs.
11.20 Akaroa Support: Multiple Replications in Parallel¶
11.20.1 Introduction¶
Typical simulations are Monte-Carlo simulations: they use (pseudo-)random numbers to drive the simulation model. For the simulation to produce statistically reliable results, one has to carefully consider the following:
- When the initial transient is over, when can we start collecting data? Usually, we do not want to include the initial transient when the simulation is still “warming up”.
- When can we stop the simulation? We want to wait long enough so that the statistics we are collecting can “stabilize” or reach the required sample size to be statistically trustworthy.
Neither question is trivial to answer. One might suggest to wait "very long" or “long enough”. However, this is neither simple (how do you know what is “long enough”?) nor practical (even with today's high-speed processors, simulations of modest complexity can take hours, and one may not afford multiplying runtimes by, say, 10, “just to be safe”). If you need further convincing, please read [Pawlikowsky02] and be horrified.
A possible solution is to look at the statistics while the simulation is running and decide at runtime when enough data has been collected for the results to have reached the required accuracy. One possible criterion is given by the confidence level, more precisely, by its width relative to the mean. But ex ante, it is unknown how many observations have to be collected to achieve this level -- it must be determined at runtime.
11.20.2 What Is Akaroa¶
Akaroa [Akaroa99] addresses the above problem. According to its authors, Akaroa (Akaroa2) is a "fully automated simulation tool designed for running distributed stochastic simulations in MRIP scenarios" in a cluster computing environment.
MRIP stands for Multiple Replications in Parallel. In MRIP, the computers of the cluster run independent replications of the whole simulation process (i.e., with the same parameters but a different seed for the RNGs (random number generators)), generating statistically equivalent streams of simulation output data. These data streams are fed to a global data analyzer responsible for analysis of the final results and for stopping the simulation when the results reach a satisfactory accuracy.
The independent simulation processes run independently of one another and continuously send their observations to the central analyzer and control process. This process combines the independent data streams and calculates from these observations an overall estimate of the mean value of each parameter. Akaroa2 decides by a given confidence level and precision whether it has enough observations or not. When it judges that it has enough observations, it halts the simulation.
If n processors are used, the needed simulation execution time is usually n times smaller compared to a one-processor simulation (the required number of observations is produced sooner). Thus, the simulation would be sped up approximately in proportion to the number of processors used and sometimes even more.
Akaroa was designed at the University of Canterbury in Christchurch, New Zealand and can be used free of charge for teaching and non-profit research activities.
11.20.3 Using Akaroa with OMNeT++¶
11.20.3.1 Starting Akaroa¶
Before the simulation can be run in parallel under Akaroa, you have to start up the system:
- Start akmaster running in the background on some host.
- On each host where you want to run a simulation engine, start akslave in the background.
Each akslave establishes a connection with the akmaster.
Then you use akrun to start a simulation. akrun waits for the simulation to complete and writes a report of the results to the standard output. The basic usage of the akrun command is:
$ akrun -n num_hosts command [argument..]
where command is the name of the simulation you want to start. Parameters for Akaroa are read from the file named Akaroa in the working directory. Collected data from the processes is sent to the akmaster process, and when the required precision has been reached, akmaster tells the simulation processes to terminate. The results are written to the standard output.
The above description is not detailed enough to help you set up and successfully use Akaroa -- for that, you need to read the Akaroa manual.
11.20.3.2 Configuring OMNeT++ for Akaroa¶
First of all, you have to compile OMNeT++ with Akaroa support enabled.
The OMNeT++ simulation must be configured in omnetpp.ini so that it passes the observations to Akaroa. The simulation model itself does not need to be changed -- it continues to write the observations into output vectors (cOutVector objects, see chapter [7]). You can place some of the output vectors under Akaroa control.
You need to add the following to omnetpp.ini:
[General] rng-class = "cAkaroaRNG" outputvectormanager-class = "cAkOutputVectorManager"
These lines cause the simulation to obtain random numbers from Akaroa
and allow data written to selected output vectors to be passed to Akaroa's
global data analyzer.
- [For more details on the plugin mechanism these settings make use of,
see [17].]
Akaroa's RNG is a Combined Multiple Recursive pseudorandom number generator (CMRG) with a period of approximately 2191 random numbers and provides a unique stream of random numbers for every simulation engine.
- NOTE
It is vital that you obtain random numbers from Akaroa; otherwise, all simulation processes will run with the same RNG seeds and produce exactly the same results.
Then you need to specify which output vectors you want to be under Akaroa control (by default, none of them are). You can use the *, ** wildcards (see section [10.3.1]) to place certain vectors under Akaroa control.
<modulename>.<vectorname1>.with-akaroa = true <modulename>.<vectorname2>.with-akaroa = true
11.20.3.3 Using Shared File Systems¶
It is usually practical to have the same physical disk mounted (e.g., via NFS or Samba) on all computers in the cluster. However, because all OMNeT++ simulation processes run with the same settings, they would overwrite each other's output files. You can prevent this from happening using the fname-append-host ini file entry:
[General] fname-append-host = true
When turned on, it appends the host name to the names of the output files (output vector, output scalar, snapshot files).
12 Result Recording and Analysis¶
12.1 Result Recording¶
OMNeT++ offers built-in support for recording simulation results through output vectors and output scalars. Output vectors are time series data recorded from simple modules or channels. They can be used to record end-to-end delays, round-trip times of packets, queue lengths, queueing times, module state, link utilization, packet drops, etc. - anything that provides a comprehensive understanding of the model's behavior during the simulation.
Output scalars are summary results computed during the simulation and written out upon completion. A scalar result may be a (integer or real) number or a statistical summary comprised of several fields, such as count, mean, standard deviation, sum, minimum, maximum, etc., and optionally, histogram data.
Results can be collected and recorded in two ways:
- Based on the signal mechanism, using declared statistics;
- Directly from C++ code, using the simulation library
The second method has traditionally been used for result recording. The first method, based on signals and declared statistics, was introduced in OMNeT++ 4.1 and is preferable because it allows you to always record the results in the desired form without requiring extensive instrumentation or constant adjustments to the simulation model.
12.1.1 Using Signals and Declared Statistics¶
This approach combines the signal mechanism (see [4.14]) and NED properties (see [3.12]) to decouple the generation and recording of results, providing greater flexibility in deciding what to record and in which form. The details of the solution are described in section [4.15] in detail; here we provide a brief overview.
Statistics are declared in the NED files using the @statistic property, and modules emit values using the signal mechanism. The simulation framework records data by adding special result file writer listeners to the signals. By choosing which listeners to add, the user can control what gets recorded in the result files and what computations to apply before recording. The aforementioned section [4.15] also explains how to instrument simple modules and channels for signals-based result recording.
The signals approach allows for the calculation of aggregate statistics (such as the total number of packet drops in the network) and for implementing a warm-up period without requiring support from module code. It also allows you to write dedicated statistics collection modules for the simulation without modifying existing modules.
The same configuration options used to control result recording with cOutVector and recordScalar() also apply when using the signals approach, and extra configuration options are available to provide additional functionality.
12.1.2 Direct Result Recording¶
With this approach, scalar and statistical results are collected as class variables within modules and then recorded during the finalization phase using recordScalar() calls. Vectors are recorded using cOutVector objects. Use cStdDev to record summary statistics such as mean, standard deviation, minimum/maximum, and histogram-like classes (cHistogram, cPSquare, cKSplit) to record the distribution. These classes are described in sections [7.9] and [7.10]. Recording of individual vectors, scalars, and statistics can be enabled or disabled via the configuration (ini) file, where recording intervals for vectors can also be set.
The drawback of recording results directly from modules is that result recording is hardcoded in the modules, and even simple requirement changes (e.g., recording the average delay instead of each delay value, or vice versa) require either code modification or an excessive amount of result collection code within the modules.
12.2 Configuring Result Collection¶
12.2.1 Result File Names¶
Simulation results are recorded into output scalar files that also hold statistics results, and output vector files. The usual file extension for scalar files is .sca, and for vector files .vec.
Every simulation run generates a single scalar file and a vector file. The file names can be controlled with the output-vector-file and output-scalar-file options. These options rarely need to be used because the default values are usually sufficient. The defaults are:
output-vector-file = "${resultdir}/${configname}-${runnumber}.vec"
output-scalar-file = "${resultdir}/${configname}-${runnumber}.sca"
Here, ${resultdir} is the value of the result-dir configuration option which defaults to results/, and ${configname} and ${runnumber} are the names of the configuration name in the ini file (e.g., [Config PureAloha]), and the run number, respectively. Thus, the above defaults generate file names such as results/PureAloha-0.vec, results/PureAloha-1.vec, and so on.
12.2.2 Enabling/Disabling Result Items¶
The recording of simulation results can be enabled or disabled at multiple levels with various configuration options:
- All recording from a @statistic can be enabled or disabled together using the statistic-recording option.
- Recording of a scalar or a statistic object can be controlled with the scalar-recording option.
- Recording of an output vector can be controlled with the vector-recording option.
- Recording of the bins of a histogram object can be controlled with the bin-recording option.
All the above options are boolean per-object options; thus, they have similar syntaxes:
- <module-path>.<statistic-name>.statistic-recording = true/false
- <module-path>.<scalar-name>.scalar-recording = true/false
- <module-path>.<vector-name>.vector-recording = true/false
- <module-path>.<histogram-name>.bin-recording = true/false
For example, recording from the following statistic:
@statistic[queueLength](record=max,timeavg,vector);
can be disabled with this ini file line:
**.queueLength.statistic-recording = false
When a scalar, vector, or histogram is recorded using a @statistic, its name is derived from the statistic name by appending the recording mode after a semicolon. For example, the above statistic will generate the scalars named queueLength:max and queueLength:timeavg, and the vector named queueLength:vector. Their recording can be individually disabled with the following lines:
**.queueLength:max.scalar-recording = false **.queueLength:timeavg.scalar-recording = false **.queueLength:vector.vector-recording = false
The statistic, scalar, or vector name part in the key may also contain wildcards. This can be used, for example, to handle result items with similar names together or, by using * as the name, for filtering by module or to disable all recording. The following example turns off recording of all scalar results except those called latency and those produced by modules named tcp:
**.tcp.*.scalar-recording = true **.latency.scalar-recording = true **.scalar-recording = false
To disable all result recording, use the following three lines:
**.statistic-recording = false **.scalar-recording = false **.vector-recording = false
The first line is not strictly necessary. However, it may improve runtime performance because it causes result recorders not to be added instead of adding and then disabling them.
12.2.3 Selecting Recording Modes for Signal-Based Statistics¶
Signal-based statistics recording has been designed so that it can be easily configured to record a “default minimal” set of results, a “detailed” set of results, and a custom set of results (by modifying the previous ones or defining from scratch).
Recording can be tuned with the result-recording-modes per-object configuration option. The “object” here is the statistic, which is identified by the full path (hierarchical name) of the module or connection channel object in question, plus the name of the statistic (which is the “index” of @statistic property, i.e., the name in the square brackets). Thus, configuration keys have the syntax <module-path>.<statistic-name>.result-recording-modes=.
The result-recording-modes option accepts one or more items as a value, separated by a comma. An item may be a result recording mode and two words with a special meaning: default and all.
- A result recording mode refers to any item that may occur in the record key of the @statistic property; for example, count, sum, mean, vector((count-1)/2).
- default stands for the set of non-optional items from the @statistic property's record list, i.e., those without question marks.
- all means all items from the @statistic property's record list, including the ones with question marks.
The default value is default.
A lone “-” as the option value disables all recording modes.
Recording mode items in the list may be prefixed with “+” or “-” to add/remove them from the set of result recording modes. The initial set of result recording modes is default; if the first item is prefixed with “+” or “-”, then that and all subsequent items are understood as modifying the set; if the first item does not start with “+” or “-”, then it replaces the set, and further items are understood as modifying the set.
This may sound more complicated than it is, and an example will make it clear. Suppose we are configuring the following statistic:
@statistic[foo](record=count,mean,max?,vector?);
With the following ini file lines (see results in comments):
**.result-recording-modes = default # --> count, mean **.result-recording-modes = all # --> count, mean, max, vector **.result-recording-modes = - # --> none **.result-recording-modes = mean # --> only mean (disables 'default') **.result-recording-modes = default,-vector,+histogram # --> count,mean,histogram **.result-recording-modes = -vector,+histogram # --> same as the previous **.result-recording-modes = all,-vector,+histogram # --> count,mean,max,histogram
Here is another example that shows how to write a more specific option key. The following line applies to queueLength statistics of fifo[] submodule vectors anywhere in the network:
**.fifo[*].queueLength.result-recording-modes = +vector # default plus vector
In the result file, the recorded scalars will be suffixed with the recording mode; for example, the mean of queueingTime will be recorded as queueingTime:mean.
12.2.4 Warm-up Period¶
The warmup-period option specifies the length of the initial warm-up period. When set, results belonging to the first x seconds of the simulation will not be recorded into output vectors and will not be counted in the calculation of output scalars. This option is useful for steady-state simulations. The default is 0s (no warm-up period).
Example:
warmup-period = 20s
12.2.4.1 Refining Warm-up Period Handling¶
Warm-up period handling works by inserting a special filter, a warm-up period filter, into the filter/recorder chain if a warm-up period is requested. This filter acts like a timed switch: it discards values during the specified warm-up period and allows them to pass through afterwards.
OMNeT++ allows you to disable the automatic adding of warm-up filters by specifying autoWarmupFilter=false in the @statistic as an attribute and manually placing such filters (warmup) instead.
Why is this necessary? By default, the filter is inserted at the front of the filter/recorder chain of every statistic. However, the front is not always the correct place for the warm-up period filter. Consider, for example, computing the number of packets in a (compound) queue as the difference between the number of arrivals and departures from the queue. This can be achieved using @statistic as follows:
@signal[pkIn](type=cPacket); @signal[pkOut](type=cPacket); @statistic[queueLen](source=count(pkIn)-count(pkOut);record=vector);
When a warm-up period is configured, the necessary warm-up period filters are inserted right before the count filters. This can be expressed as the following expression for the statistic's source attribute:
count(warmup(pkIn)) - count(warmup(pkOut))
which is apparently incorrect because the count filters only start counting when the warm-up period is over. Thus, the measured queue length will start from zero when the warm-up period is over, even though the queue might not be empty! In fact, if the first event after the warm-up period is a departure, the measured queue length will even go negative.
The correct solution would be to put the warmup filter at the end like so:
warmup(count(pkIn)-count(pkOut))
Thus, the correct form of the queue length statistic is the following:
@statistic[queueLen](source=warmup(count(pkIn)-count(pkOut));
autoWarmupFilter=false;
record=vector);
12.2.4.2 Manual Result Recording¶
Results recorded via signal-based statistics automatically obey the warm-up period setting, but modules that compute and record scalar results manually (via recordScalar()) need to be modified so that they take the warm-up period into account.
- NOTE
When configuring a warm-up period, make sure that modules that compute and record scalar results manually via recordScalar() actually obey the warm-up period in the C++ code.
The warm-up period is available via the getWarmupPeriod() method of the simulation manager object, so the C++ code that updates the corresponding state variables needs to be surrounded with an if statement.
Old:
dropCount++;
New:
if (simTime() >= getSimulation()->getWarmupPeriod())
dropCount++;
12.2.5 Output Vectors Recording Intervals¶
The size of output vector files can easily reach several gigabytes, but very often, only some of the recorded statistics are interesting to the analyst. In addition to selecting which vectors to record, OMNeT++ also allows one to specify one or more collection intervals.
The latter can be configured with the vector-recording-intervals per-object option. The syntax of the configuration option is <module-path>.<vector-name>.vector-recording-intervals=<intervals>, where both <module-path> and <vector-name> may contain wildcards (see [10.3.1]). <vector-name> is the vector name or the name string of the cOutVector object. By default, all output vectors are enabled for the whole duration of the simulation.
One can specify one or more intervals in the <startTime>..<stopTime> syntax, separated by a comma. <startTime> or <stopTime> need to be given with measurement units, and both can be omitted to denote the beginning and the end of the simulation, respectively.
The following example limits all vectors to three intervals, except dropCount vectors which will be recorded during the whole simulation run:
**.dropCount.vector-recording-intervals = 0.. **.vector-recording-intervals = 0..1000s, 5000s..6000s, 9000s..
12.2.6 Recording Event Numbers in Output Vectors¶
A third per-vector configuration option is vector-record-eventnumbers,
which specifies whether to record event numbers for an output vector (simulation
time and value are always recorded).
- [Event numbers are needed
by the Sequence Chart Tool, for example.]
**.vector-record-eventnumbers = false
If the (default) cIndexedFileOutputVectorManager class is used to record output vectors, there are two more options to fine-tune its resource usage. output-vectors-memory-limit specifies the total memory that can be used for buffering output vectors. Larger values produce less-fragmented vector files (i.e., cause vector data to be grouped into larger chunks) and therefore allow more efficient processing later. vector-max-buffered-values specifies the maximum number of values to buffer per vector before writing out a block into the output vector file. The default is no per-vector limit (i.e., only the total memory limit is in effect).
12.2.7 Saving Parameters as Scalars¶
When running several simulations with different parameter settings, it is often useful to refer to selected input parameters in the result analysis as well. For example, when drawing a throughput (or response time) versus load (or network background traffic) plot, average throughput or response time numbers are saved into the output scalar files. Therefore, it is also useful for the input parameters to be saved into the same file.
For convenience, OMNeT++ automatically saves the iteration variables into the output scalar file if they have a numeric value so that they can be referred to during result analysis.
- WARNING
If an iteration variable has a non-numeric value, it will not be recorded automatically and cannot be used during analysis. This can unintentionally happen if you specify units inside an iteration variable list:
**.param = exponential( ${mean=0.2s, 0.4s, 0.6s} ) #WRONG!
**.param = exponential( ${mean=0.2, 0.4, 0.6}s ) #OK
Module parameters can also be saved, but this has to be requested by the user by configuring param-record-as-scalar=true for the parameters in question. The configuration key is a pattern that identifies the parameter plus .param-record-as-scalar. An example:
**.host[*].networkLoad.param-record-as-scalar = true
This looks simple enough, but there are three pitfalls: non-numeric parameters, too many matching parameters, and randomly valued volatile parameters.
First, the scalar file only holds numeric results, so non-numeric parameters cannot be recorded; otherwise, a runtime error will occur.
Second, if wildcards in the pattern match too many parameters, the size of the scalar file might unnecessarily increase. For example, if the host[] module vector size is 1000 in the example below, then the same value (3) will be saved 1000 times into the scalar file, once for each host.
**.host[*].startTime = 3 **.host[*].startTime.param-record-as-scalar = true # saves "3" once for each host
Third, recording a random-valued volatile parameter will save a random number from that distribution. This is rarely what you need, and the simulation kernel will also issue a warning if this happens.
**.interarrivalTime = exponential(1s) **.interarrivalTime.param-record-as-scalar = true # wrong: saves random values!
These pitfalls are quite common in practice, so it is usually better to rely on the iteration variables in the result analysis. That is, one can rewrite the above example as:
**.interarrivalTime = exponential( ${mean=1}s )
and refer to the $mean iteration variable instead of the interarrivalTime module parameter(s) during result analysis. param-record-as-scalar=true is not needed because iteration variables are automatically saved into the result files.
12.2.8 Recording Precision¶
Output scalar and output vector files are text files, and floating-point values (doubles) are recorded into them using the fprintf() function with the "%g" format. The number of significant digits can be configured using the output-scalar-precision and output-vector-precision configuration options.
The default precision is 12 digits. When setting a different value, the following considerations apply:
IEEE-754 doubles are 64-bit numbers. The mantissa is 52 bits, which is roughly equivalent to 16 decimal places (52*log(2)/log(10)). However, due to rounding errors, usually only 12 to 14 digits are correct, and the rest are essentially random garbage that should be ignored. Furthermore, when converting the decimal representation back into a double for result processing, an additional small error will occur because 0.1, 0.01, etc., cannot be accurately represented in binary. This conversion error is usually smaller than what the double variable already had before recording it into the file. However, if it is important, the recording precision can be set to 16 digits or more to eliminate this error (but again, be aware that the last digits are garbage). The practical upper limit is 17 digits; setting it higher does not make any difference in the output of fprintf(). Errors resulting from rounding and conversion can be eliminated by choosing an output vector/output scalar manager class that stores doubles in their native binary form. The appropriate configuration options are outputvectormanager-class and outputvectormanager-class. For example, cMySQLOutputScalarManager and cMySQLOutputScalarManager provided in samples/database fulfill this requirement.
However, before worrying too much about rounding and conversion errors, consider the real accuracy of your results:
- In real life, it is very difficult to measure quantities (weight, distance, even time) with more than a few digits of precision. What is the precision of your input data? For example, if you approximate inter-arrival time as exponential(0.153) when the mean is really 0.152601... and the distribution is not even exactly exponential, you are already starting out with a bigger error than rounding can cause.
- The simulation model itself is an approximation of real life. How much error do the (known and unknown) simplifications cause in the results?
12.3 Result Files¶
12.3.1 The OMNeT++ Result File Format¶
By default, OMNeT++ saves simulation results into textual, line-oriented files. The advantage of a text-based, line-oriented format is that it is highly accessible and easy to parse with a wide range of tools and languages, while still providing enough flexibility to represent the necessary data (in contrast to formats like CSV). This section provides an overview of these file formats (output vector and output scalar files); the precise specification is available in the Appendix ([28]). By default, each file contains data from only one run.
Result files start with a header that contains several attributes of the simulation run: a reasonably globally unique run ID, the network NED type name, the experiment-measurement-replication labels, the values of iteration variables and the repetition counter, the date and time, the host name, the process id of the simulation, random number seeds, configuration options, and so on. This data can be useful during result processing and increase the reproducibility of the results.
Vectors are recorded into a separate file for practical reasons: vector data usually consume several magnitudes more disk space than scalars.
12.3.1.1 Output Vector Files¶
All output vectors from a simulation run are recorded into the same file. The following sections describe the format of the file and how to process it.
An example file fragment (without header):
... vector 1 net.host[12] responseTime TV 1 12.895 2355.66 1 14.126 4577.66664666 vector 2 net.router[9].ppp[0] queueLength TV 2 16.960 2 1 23.086 2355.66666666 2 24.026 8 ...
There are two types of lines: vector declaration lines (beginning with the word vector) and data lines. A vector declaration line introduces a new output vector, and its columns are: vector Id, module of creation, name of cOutVector object, and multiplicity (usually 1). Actual data recorded in this vector are on data lines which begin with the vector Id. Further columns on data lines are the simulation time and the recorded value.
Since OMNeT++ 4.0, vector data has been recorded into the file clustered by output vectors, which, combined with index files, allows much more efficient processing. Using the index file, tools can extract particular vectors by reading only those parts of the file where the desired data are located, and they do not need to scan through the whole file linearly.
12.3.1.2 Scalar Result Files¶
Fragment of an output scalar file (without header):
... scalar "lan.hostA.mac" "frames sent" 99 scalar "lan.hostA.mac" "frames rcvd" 3088 scalar "lan.hostA.mac" "bytes sent" 64869 scalar "lan.hostA.mac" "bytes rcvd" 3529448 ...
Every scalar generates one scalar line in the file.
Statistics objects (cStatistic subclasses such as cStdDev) generate several lines: mean, standard deviation, etc.
12.3.2 SQLite Result Files¶
Starting from version 5.1, OMNeT++ contains experimental support for saving simulation results into SQLite database files. The perceived advantage of SQLite is its existing support in many existing tools and languages (no need to write custom parsers), and being able to use the power of the SQL language for queries. The latter is very useful for processing scalar results, and less so for vectors and histograms.
To enable a simulation to record its results in SQLite format, add the following configuration options to its omnetpp.ini:
outputvectormanager-class="omnetpp::envir::SqliteOutputVectorManager" outputscalarmanager-class="omnetpp::envir::SqliteOutputScalarManager"
- NOTE
Alternatively, to make SQLite the default format, recompile OMNeT++ with PREFER_SQLITE_RESULT_FILES=yes set in configure.user. (Don't forget to also run ./configure before make.)
The SQLite result files will be created with the same names as textual result files. The two formats also store exactly the same data, only in a different way (there is a one-to-one correspondence between them). The Simulation IDE and scavetool also understand both formats.
- HINT
If you want to get acquainted with the organization of SQLite result files, exploring one in a graphical tool such as SQLiteBrowser or SQLite Studio should be a good start.
The database schema can be found in Appendix [28].
12.3.3 Scavetool¶
OMNeT++'s opp_scavetool program is a command-line tool for exploring, filtering, and processing result files, and exporting the result in formats that are compatible with other tools.
12.3.3.1 Commands¶
opp_scavetool functionality is grouped under four commands: query, export, index, and help.
- query: Query the contents of result files. One can list runs, run attributes, result items, unique result names, unique module names, unique configuration names, etc. One can filter for result types (scalar/vector/histogram) and by run, module name, result name, and value, using match expressions. There are various options controlling the format of the output (group-by-runs; grep-friendly; suppress labels; several modes for identifying the run in the output, etc.)
- export: Export results in various formats. Results can be filtered by run, module name, result name, and more, using match expressions. Output vectors can be cropped to a time interval. Several output formats are available: CSV in two flavors (one for machine consumption, and a more informal one for human consumption via loading into spreadsheet programs), OMNeT++ output scalar/vector file (default), OMNeT++ SQLite result file, and JSON (again two flavors: one strictly adhering to the JSON rules, and another with slightly more relaxed rules but also more expressive). All exporters have multiple options for fine-tuning the output.
- index: Generate index files (.vci) for vector files. Note that this command is usually not needed, as other scavetool commands automatically create vector file indices if they are missing or out of date (unless indexing is explicitly disabled). This command can also be used to rebuild a vector file so that data are clustered by vectors for more efficient access.
- help: Prints help. The synopsys is opp_scavetool help <topic>, where any command name can be used as a topic, plus there are additional ones like patterns or filters. scavetool <command> -h also works.
The default command is query, so its name can be omitted on the command line.
12.3.3.2 Examples¶
The following example prints a one-line summary of the contents of result files in the current directory:
$ opp_scavetool *.sca *.vec runs: 42 scalars: 294 parameters: 7266 vectors: 22 statistics: 0 ...
Listing all results is possible using -l:
$ opp_scavetool -l *.sca *.vec PureAlohaExperiment-439-20161216-18:56:20-27607: scalar Aloha.server duration 26.3156 scalar Aloha.server collisionLength:mean 0.139814 vector Aloha.host[0] radioState:vector vectorId=2 count=3 mean=0.33 .. vector Aloha.host[1] radioState:vector vectorId=3 count=9 mean=0.44 .. vector Aloha.host[2] radioState:vector vectorId=4 count=5 mean=0.44 .. ...
To export all scalars in CSV, use the following command:
$ opp_scavetool export -F CSV-R -o x.csv *.sca Exported 294 scalars, 7266 parameters, 84 histograms
The next example writes the queueing and transmission time vectors of sink modules into a CSV file.
$ opp_scavetool export -f 'module=~**.sink AND ("queueing time" OR "tx time")'
-o out.csv -F CSV-R *.vec
Exported 15 vectors
12.4 Result Analysis¶
The recommended method for analyzing simulation results is using the Analysis Tool in the Simulation IDE. The Analysis Tool provides a user-friendly interface for selecting result files, browsing their contents, selecting desired results, and creating plots. The resulting plots and data can be exported in several formats, both individually and in batches. There are various chart types to choose from, and it is also possible to create custom charts.
Charts in the Analysis Tool utilize Python scripts. The Python scripts behind
the charts are open for the user to view and edit, enabling the implementation
of arbitrary logic and computations. Visualization can be done using the IDE's
native plotting widgets or with Matplotlib. Using Matplotlib offers virtually
limitless possibilities for visualization.
- [It is worth noting that
Matplotlib has extensions like Seaborn, Canopy, HoloViews, etc., which can also
be used in chart scripts, further expanding the set of possibilities.]
- NOTE
It is important to note the distinction in terminology. While the terms chart and plot are often used interchangeably in everyday speech, they carry related but distinct meanings in the context of OMNeT++ result analysis. When we refer to a chart, we essentially mean a Python script with associated metadata and parameterization that serves as a “recipe” for producing a plot. The term plot is used to refer to the graphics that appear as the result of running the chart script.
Chart scripts can also be used outside the IDE. The scripts saved as part of the IDE's analysis files (.anf) can be viewed or run using the opp_chartool command-line program. Additionally, the result processing capabilities can be utilized in standalone Python scripts. When chart scripts are run outside the IDE, the native plotting widgets are “emulated” using Matplotlib.
The Analysis Tool is thoroughly covered in the User Guide. The following sections focus on the programming API.
12.4.1 Python Packages¶
Chart scripts heavily rely on the following widely-used Python packages:
- NumPy: Utilized for efficient representation of numeric arrays and related operations.
- Pandas: Used for representing and manipulating simulation results through DataFrames.
- Matplotlib: Used for generating the actual plots.
The following packages are added by OMNeT++:
- omnetpp.scave.results: Provides access to the simulation results for the chart script. The results are returned as Pandas DataFrames in various formats.
- omnetpp.scave.chart: Provides access to the properties of the current chart for the chart script.
- omnetpp.scave.ideplot: This module is the interface for displaying plots with the IDE's native plotting widgets. The API closely resembles matplotlib.pyplot, facilitating the porting of scripts between the two APIs. When a chart script runs without the native plotting widget environment, such as when executed from opp_chartool, the functions are emulated using Matplotlib.
- omnetpp.scave.utils: A collection of utility functions for data manipulation and plotting, built on top of DataFrames and the chart and plot packages from omnetpp.scave.
- omnetpp.scave.vectorops: Contains operations that can be applied to output vectors.
In addition, there is an extra module:
- omnetpp.scave.analysis: Provides support for reading and writing analysis (anf) files from Python, and running chart scripts in them for display, image export, or data export.
These packages are thoroughly documented in Appendix [30].
12.4.2 An Example Chart Script¶
Since information on NumPy, Pandas, and Matplotlib can be found extensively online, and a reference for the omnetpp.scave.* Python packages is provided in Appendix [30], it is unnecessary to explain their functionality in depth here. Instead, this section will walk through an actual chart script to demonstrate its practical implementation.
The selected chart script is for the bar chart, which serves as a representative example. It will help readers understand other chart scripts, modify them to meet specific requirements, or even create their own. The script is relatively short and straightforward, making it easy to follow. The source code is provided below, along with explanations after certain lines.
from omnetpp.scave import results, chart, utils
The first lines import the required packages that will be used in the chart script. This step is necessary as no modules are automatically imported when the chart script starts.
It is worth noting that all imported modules are under the omnetpp.scave module, rather than being imported directly from the numpy, pandas, or matplotlib packages. This distinction exists because almost all necessary functionality is already contained within convenience methods in the utils and plot modules.
# get chart properties props = chart.get_properties()
In this part, the properties of the bar chart are obtained using the chart module. The props object is a Python dict that contains entries influenced by the chart properties dialog, acting as parameters for the chart script and the resulting plot.
Adding print(props) or for k,v in props.items(): print(repr(k), "=", repr(v)) to the code will output the following after the chart script runs:
'confidence_level' = '95\%' 'filter' = 'type =~ scalar AND name =~ channelUtilization:last' 'grid_show' = 'true' 'legend_prefer_result_titles' = 'true' 'title' = '' 'legend_show' = 'true' 'matplotlibrc' = '' ...
Many of the entries should look familiar, as most of them correspond directly to widgets in the Chart Properties dialog in the IDE. It is important to note that all values are strings.
utils.preconfigure_plot(props)
The preconfigure_plot() call is a mandatory part of a chart script. Its purpose is to ensure that visual properties take effect in the plot. It is worth mentioning that there will also be a postconfigure_plot() call since some properties need to be set before plotting, while others require configuration after the plotting stage.
# collect parameters for query filter_expression = props["filter"] include_fields = props["include_fields"] == "true"
In this part, the result query string is obtained from the properties. This query string selects the subset of results that will be used as input for the chart from the complete set of results loaded from the result files. The "filter" property is applicable to almost all chart types.
Since bar charts work with scalars, users are given the option to choose whether fields (such as :mean, :count, :sum, etc.) of vector, statistics, and histogram results should be included in the source dataset as scalars.
# query scalar data into dataframe
try:
df = results.get_scalars(filter_expression, include_fields=include_fields,
include_attrs=True, include_runattrs=True, include_itervars=True)
except ValueError as e:
raise chart.ChartScriptError("Error while querying results: " + str(e))
In this section, the results.get_scalars() function is used to acquire the data for the plot. It is the most significant part of the script. The function utilizes the results module to obtain the data. The resulting Pandas DataFrame contains one row for each scalar result. Columns include runID, which uniquely identifies the simulation run, module, name, and value referring to the scalar. It also includes various other columns representing metadata such as result attributes, iteration variables, and run attributes (iaMean, numHosts, configname, datetime, etc.).
By adding print(df) to the code, the contents of the dataframe can be printed. The output will resemble the following (for brevity, some less important columns are omitted and the name of the last column, repetition, is abbreviated):
module name value iaMean numHosts rep.
0 Aloha.server channelUtilization:last 0.156057 1 10 0
1 Aloha.server channelUtilization:last 0.156176 1 10 1
2 Aloha.server channelUtilization:last 0.196381 2 10 0
3 Aloha.server channelUtilization:last 0.193253 2 10 1
4 Aloha.server channelUtilization:last 0.176507 3 10 0
5 Aloha.server channelUtilization:last 0.176136 3 10 1
6 Aloha.server channelUtilization:last 0.152471 4 10 0
7 Aloha.server channelUtilization:last 0.154667 4 10 1
11 Aloha.server channelUtilization:last 0.108992 7 10 0
...
It's worth noting that try...except is used here to catch any exceptions (typically syntax errors in the query) and report them to the user in a more user-friendly manner instead of displaying a stack trace. Raising a chart.ChartScriptError displays the provided message in the plot area.
if df.empty:
raise chart.ChartScriptError("The result filter returned no data.")
If the query doesn't match any results, this line will raise an exception to inform the user instead of letting them discover it from the empty plot.
groups, series = utils.select_groups_series(df, props)
The Groups and Series fields in the Chart Properties dialog define how the bar chart will be organized. If these fields are populated with multiple variables (comma-separated), this step will split the values and convert them into lists.
If these fields are left empty, the script will attempt to find reasonable values for them. It will also detect various misconfigurations (such as non-existent column names or overlap between "groups" and "series" columns) and inform the user of any issues. Omitting these checks would likely lead to spurious Pandas exceptions later on, which often provide insufficient guidance to the user about the actual problem.
confidence_level = utils.get_confidence_level(props)
In this section, the requested confidence level is extracted from the properties. The user can select "none" from the combo box in the dialog to disable confidence interval computation.
valuedf, errorsdf, metadf =
utils.pivot_for_barchart(df, groups, series, confidence_level)
utils.plot_bars(valuedf, errorsdf, metadf, props)
Finally, the important part of the script is reached, which involves pivoting the data and plotting it. The function utils.pivot_for_barchart() is used for pivoting, and utils.plot_bars() is used for plotting.
If a print(valuedf) statement is added, the result of pivoting will be displayed:
numHosts 10 15 20 iaMean 1 0.156116 0.089539 0.046586 2 0.194817 0.178159 0.147564 3 0.176321 0.191571 0.183976 4 0.153569 0.182324 0.190452 5 0.136997 0.168780 0.183742 7 0.109281 0.141556 0.164038 9 0.089658 0.120800 0.142568
If the user didn't request a confidence interval (error bars), the value of errorsdf will be None.
In this case, the default 95% confidence level is used, resulting in the following output when printing errorsdf:
numHosts 10 15 20 iaMean 1 0.000117 0.001616 0.001968 2 0.003065 0.000619 0.002162 3 0.000364 0.001426 0.001704 4 0.002152 0.000918 0.002120 5 0.002391 0.000411 0.000625 7 0.000568 0.001729 0.002221 9 0.001621 0.002385 0.000259
This dataframe has the same structure (column and row headers) as valuedf, with different values. The values represent the half-length of the confidence interval corresponding to the selected confidence level, so it can be interpreted as a "+/-" range.
The third dataframe, metadf, contains various pieces of metadata about the results.
Here are a few columns from metadf:
measurement module title
iaMean
1 $numHosts=10, $iaMean=1, etc. Aloha.server channel utilization, last
2 $numHosts=10, $iaMean=2, etc. Aloha.server channel utilization, last
3 $numHosts=10, $iaMean=3, etc. Aloha.server channel utilization, last
4 $numHosts=10, $iaMean=4, etc. Aloha.server channel utilization, last
5 $numHosts=10, $iaMean=5, etc. Aloha.server channel utilization, last
7 $numHosts=10, $iaMean=7, etc. Aloha.server channel utilization, last
9 $numHosts=10, $iaMean=9, etc. Aloha.server channel utilization, last
This dataframe is used to create the legend labels for the series of bars on the plot. The row headers match those of valuedf, while the column headers represent the names of run and result attributes, as well as iteration variables. In cases where multiple different values are to be put into the same cell, only the first value is included, and "etc." is appended.
It should be noted that separating the results into separate dataframes like this is unnecessary for some other chart types (line charts, histogram charts, etc.), as those charts do not perform pivot operations on their results. The corresponding plots accept data formats that can store the metadata in the same dataframe as the main values to be plotted.
The resulting plot is shown in Figure below:

utils.postconfigure_plot(props)
This line applies the remaining visual properties to the plot.
utils.export_image_if_needed(props) utils.export_data_if_needed(df, props)
These lines perform image and data export. Exporting is accomplished by executing chart scripts with certain properties set to indicate the desire to export. utils.export_image_if_needed() and utils.export_data_if_needed() take those flag properties, as well as numerous other properties related to exporting. The latter saves the provided dataframe as a file.
12.5 Alternatives¶
Based on your personal preferences, you may choose to use a different environment, language, or tool than the IDE's Analysis tool for analyzing simulation results. Here are some of the possibilities:
- Use your favorite Python editor to write the analysis scripts, using the packages mentioned in the previous section.
- A Jupyter Notebook can also be used to write up the analysis steps, still using Python and the above packages.
- If your simulations produce a large amount of data, you might prefer using the SQLite result file format, which allows you to run queries without loading all data into memory. Python also has packages to access SQLite files, e.g. sqlite3.
- If you prefer GNU R over Python/Pandas, it is also a good option.
- You may also choose to use MATLAB or GNU Octave if you are more comfortable with them.
- Spreadsheet programs such as Microsoft Excel might be suitable if the amount of data allows it. One drawback of using spreadsheets is the manual work associated with preparing and reloading data every time simulations are rerun.
- A dedicated visual analytics environment such as Tableau might be a better choice than spreadsheets.
For environments where reading OMNeT++ result files or SQLite result files is not feasible, the easiest way to proceed is to export simulation results into CSV with opp_scavetool. CSV is a universal format that nearly all tools understand.
13 Eventlog¶
13.1 Introduction¶
The eventlog feature and related tools have been added to OMNeT++ with the aim of helping the user understand complex simulation models and correctly implement the desired component behaviors. By using these tools, one can examine the details of the recorded history of a simulation, focusing on the behavior rather than the statistical results.
The eventlog file is created automatically during a simulation run upon explicit request, which can be configured in the ini file. The resulting file can be viewed in the OMNeT++ IDE using the Sequence Chart and the Eventlog Table, or it can be processed by the command line Eventlog Tool. These tools support filtering the collected data to allow you to focus on events that are relevant to what you are looking for. They allow examining causality relationships and provide filtering based on simulation times, event numbers, modules, and messages.
The simulation kernel records, among other things, user-level messages, creation and deletion of modules, gates, and connections, scheduling of self-messages, sending of messages to other modules either through gates or directly, and processing of messages (that is, events). Optionally, detailed message data can also be automatically recorded based on a message filter. The result is an eventlog file that contains detailed information of the simulation run and can later be used for various purposes.
- NOTE
The eventlog file may become quite large for long-running simulations (often hundreds of megabytes, but occasionally several gigabytes), especially when message detail recording is turned on.
13.2 Configuration¶
To record an eventlog file during the simulation, insert the following line into the ini file:
record-eventlog = true
- NOTE
Eventlog recording is turned off by default because creating the eventlog file might significantly decrease the overall simulation performance.
13.2.1 File Name¶
The simulation kernel will write the eventlog file during the simulation into the file specified by the following ini file configuration entry (showing the default file name pattern here):
eventlog-file = ${resultdir}/${configname}-${runnumber}.elog
13.2.2 Recording Intervals¶
The size of an eventlog file is approximately proportional to the number of events it contains. To reduce the file size and speed up the simulation, it might be useful to record only certain events. The eventlog-recording-intervals configuration option instructs the kernel to record events only in the specified intervals. The syntax is similar to that of vector-recording-intervals.
An example:
eventlog-recording-intervals = ..10.2, 22.2..100, 233.3..
13.2.3 Recording Modules¶
Another factor that affects the size of an eventlog file is the number of modules for which the simulation kernel records events during the simulation. The module-eventlog-recording per-module configuration option instructs the kernel to record only the events that occurred in the matching modules. The default is to record events from all modules. This configuration option only applies to simple modules.
The following example records events from any of the routers whose index is between 10 and 20 and turns off recording for all other modules.
**.router[10..20].**.module-eventlog-recording = true **.module-eventlog-recording = false
13.2.4 Recording Message Data¶
Since recording message data dramatically increases the size of the eventlog file and also slows down the simulation, it is turned off by default, even if writing the eventlog is enabled. To turn on message data recording, supply a value for the eventlog-message-detail-pattern option in the ini file.
An example configuration for an IEEE 80211 model that records the encapsulationMsg field and all other fields whose name ends in Address, from messages whose class name ends with Frame, looks like this:
eventlog-message-detail-pattern = *Frame:encapsulatedMsg,*Address
An example configuration for a TCP/IP model that records the port and address fields in all network packets looks like the following:
eventlog-message-detail-pattern = PPPFrame:encapsulatedPacket|IPDatagram:encapsulatedPacket,*Address|TCPSegment:*Port
%
% eventlog-message-detail-pattern = WirelessFrame:declaredOn(WirelessFrame) or bitLength %
13.3 Eventlog Tool¶
The Eventlog Tool is a command-line tool for processing eventlog files. Invoking it without parameters will display usage information. The following are the most useful commands for users.
13.3.1 Filter¶
The eventlog tool provides offline filtering that is usually applied to the eventlog file after the simulation has finished and before actually opening it in the OMNeT++ IDE or processing it by any other means. Use the filter command and its various options to specify what should be present in the result file.
13.3.2 Echo¶
Since the eventlog file format is text-based and users are encouraged to implement their own filters, a way is needed to check whether an eventlog file is correct. The echo command provides a way to check this and helps users create custom filters. Anything not echoed back by the eventlog tool will not be taken into consideration by the other tools found in the OMNeT++ IDE.
- NOTE
Custom filter tools should only filter out whole events; otherwise, the consequences are undefined.
14 Documenting NED and Messages¶
14.1 Overview¶
OMNeT++ provides a tool that can generate HTML documentation from NED files and message definitions. Like Javadoc and Doxygen, the NED documentation tool uses source code comments. The generated HTML documentation lists all modules, channels, messages, etc., and presents their details including description, gates, parameters, assignable submodule parameters, and syntax-highlighted source code. The documentation also includes clickable network diagrams (exported from the graphical editor) and usage diagrams as well as inheritance diagrams.The documentation tool integrates with Doxygen, which means it can hyperlink simple modules and message classes to their C++ implementation classes in the Doxygen documentation. If the C++ documentation is generated with some Doxygen features turned on (such as inline-sources and referenced-by-relation, combined with extract-all, extract-private, and extract-static), the result is an easily browsable and highly informative presentation of the source code.
NED documentation generation is available as part of the OMNeT++ IDE and also as a command-line tool (opp_neddoc).
14.2 Documentation Comments¶
Documentation is embedded in normal comments. All // comments
that are in the “right place” (from the documentation tool's
point of view) will be included in the generated documentation.
- [In contrast, Javadoc and Doxygen use special comments (those
beginning with /**, ///, //< or a similar
marker) to distinguish documentation from “normal” comments in the
source code. In OMNeT++ there is no need for that: NED and the message
syntax is compact enough that practically all comments one would want to write
in them can serve documentation purposes.]
Example:
//
// An ad-hoc traffic generator to test the Ethernet models.
//
simple Gen
{
parameters:
string destAddress; // destination MAC address
int protocolId; // value for SSAP/DSAP in Ethernet frame
double waitMean @unit(s); // mean for exponential interarrival times
gates:
output out; // to Ethernet LLC
}
One can also place comments above parameters and gates, which is better suited for long explanations. Example:
//
// Deletes packets and optionally keeps statistics.
//
simple Sink
{
parameters:
// Turns statistics generation on/off. This is a very long
// comment because it has to be described what statistics
// are collected.
bool collectStatistics = default(true);
gates:
input in;
}
14.2.1 Private Comments¶
Lines that start with //# will not appear in the generated documentation. Such lines can be used to make “private” comments like FIXME or TODO, or to comment out unused code.
//
// An ad-hoc traffic generator to test the Ethernet models.
//# TODO above description needs to be refined
//
simple Gen
{
parameters:
string destAddress; // destination MAC address
int protocolId; // value for SSAP/DSAP in Ethernet frame
//# double burstiness; -- not yet supported
double waitMean @unit(s); // mean for exponential interarrival times
gates:
output out; // to Ethernet LLC
}
14.2.2 More on Comment Placement¶
Comments should be written where the tool will find them. This is a) immediately above the documented item, or b) after the documented item, on the same line.
In the former case, make sure there is no blank line left between the comment and the documented item. Blank lines detach the comment from the documented item.
Example:
// This is wrong! Because of the blank line, this comment is not
// associated with the following simple module!
simple Gen
{
...
}
Do not try to comment groups of parameters together. The result will be awkward.
14.3 Referring to Other NED and Message Types¶
One can reference other NED and message types by name in comments. There are two styles in which references can be written: automatic linking and tilde linking. The same style must be followed throughout the whole project, and the correct one must be selected in the documentation generator tool when it is run.
14.3.1 Automatic Linking¶
In the automatic linking style, words that match existing NED or message types are hyperlinked automatically. It is usually enough to write the simple name of the type (e.g. TCP), one does not need to spell out the fully qualified type (inet.transport.tcp.TCP), although that is also allowed.
Automatic hyperlinking is sometimes overly aggressive. For example, when the words IP address appear in a comment and the project contains an IP module, it will create a hyperlink to the module, which is not desirable. One can prevent hyperlinking of a word by inserting a backslash in front of it: \IP address. The backslash will not appear in the HTML output. The <nohtml> tag will also prevent hyperlinking words in the enclosed text: <nohtml>IP address</nohtml>. On the other hand, if a backslash needs to be printed immediately in front of a word (e.g. output “use \t to print a Tab”), use either two backslashes (use \\t...) or the <nohtml> tag (<nohtml>use \t...</nohtml>). Backslashes in other contexts (i.e. when not in front of a word) do not have a special meaning and are preserved in the output.
The detailed rules:
- Words matching a type name are automatically hyperlinked.
- A backslash immediately followed by an identifier (i.e. letter or underscore) prevents hyperlinking, and the backslash is removed from the output.
- A double backslash followed by an identifier produces a single backslash, plus the potentially hyperlinked identifier.
- Backslashes in any other contexts are not interpreted and preserved in the output.
- Tildes are not interpreted and preserved in the output.
- Inside <nohtml>, no backslash processing or hyperlinking takes place.
14.3.2 Tilde Linking¶
In the tilde style, only words that are explicitly marked with a tilde are subject to hyperlinking: ~TCP, ~inet.transport.tcp.TCP.
To produce a literal tilde followed by an identifier in the output (for example, to output “the ~TCP() destructor”), the tilde character needs to be doubled: the ~~TCP() destructor.
The detailed rules:
- Words matching a type name are not hyperlinked automatically.
- A tilde immediately followed by an identifier (i.e. letter or underscore) will be hyperlinked, and the tilde is removed from the output. It is considered an error if there is no type with that name.
- A double tilde followed by an identifier produces a single tilde plus the identifier.
- Tildes in any other contexts are not interpreted and preserved in the output.
- Backslashes are not interpreted and preserved in the output.
- Inside <nohtml>, no tilde processing or hyperlinking takes place.
14.4 Text Layout and Formatting¶
14.4.1 Paragraphs and Lists¶
When writing documentation comments longer than a few sentences, one often needs structuring and formatting facilities. NED provides paragraphs, bulleted and numbered lists, and basic formatting support. More sophisticated formatting can be achieved using HTML.
Paragraphs can be created by separating text by blank lines. Lines beginning with “-” will be turned into bulleted lists, and lines beginning with “-#” into numbered lists. An example:
// // Ethernet MAC layer. MAC performs transmission and reception of frames. // // Processing of frames received from higher layers: // - sends out frame to the network // - no encapsulation of frames -- this is done by higher layers. // - can send PAUSE message if requested by higher layers (PAUSE protocol, // used in switches). PAUSE is not implemented yet. // // Supported frame types: // -# IEEE 802.3 // -# Ethernet-II //
14.4.2 Special Tags¶
The documentation tool understands the following tags and will render them accordingly: @author, @date, @todo, @bug, @see, @since, @warning, @version. Example usage:
// // @author Jack Foo // @date 2005-02-11 //
14.4.3 Text Formatting Using HTML¶
Common HTML tags are understood as formatting commands. The most useful tags are: <i>..</i> (italic), <b>..</b> (bold), <tt>..</tt> (typewriter font), <sub>..</sub> (subscript), <sup>..</sup> (superscript), <br> (line break), <h3> (heading), <pre>..</pre> (preformatted text) and <a href=..>..</a> (link), as well as a few other tags used for table creation (see below). For example, <i>Hello</i> will be rendered as “Hello” (using an italic font).
The complete list of HTML tags interpreted by the documentation tool is: <a>, <b>, <body>, <br>, <center>, <caption>, <code>, <dd>, <dfn>, <dl>, <dt>, <em>, <form>, <font>, <hr>, <h1>, <h2>, <h3>, <i>, <input>, <img>, <li>, <meta>, <multicol>, <ol>, <p>, <small>, <span>, <strong>, <sub>, <sup>, <table>, <td>, <th>, <tr>, <tt>, <kbd>, <ul>, <var>.
Any tags not in the above list will not be interpreted as formatting commands but will be printed verbatim -- for example, <what>bar</what> will be rendered literally as “<what>bar</what>” (unlike HTML where unknown tags are simply ignored, i.e. HTML would display “bar”).
With links to external pages or web sites, it's useful to add the target="_blank" attribute to ensure pages come up in a new browser tab, and not in the current frame. Alternatively, one can use the target="_top" attribute which replaces all frames in the current browser.
Examples:
// // For more info on Ethernet and other LAN standards, see the // <a href="http://www.ieee802.org/" target="_blank">IEEE 802 // Committee's site</a>. //
One can also use the <a href=..> tag to create links within the page:
// // See the <a href="#resources">resources</a> in this page. // ... // <a name="resources"><b>Resources</b></a> // ... //
One can use the <pre>..</pre> HTML tag to insert source code examples into the documentation. Line breaks and indentation will be preserved, but HTML tags continue to be interpreted (they can be turned off with <nohtml>, see later).
Example:
// <pre>
// // my preferred way of indentation in C/C++ is this:
// <b>for</b> (<b>int</b> i = 0; i < 10; i++) {
// printf(<i>"%d\n"</i>, i);
// }
// </pre>
will be rendered as
// my preferred way of indentation in C/C++ is this:
for (int i = 0; i < 10; i++) {
printf("%d\n", i);
}
HTML is also the way to create tables. The example below
// // <table border="1"> // <tr> <th>#</th> <th>number</th> </tr> // <tr> <td>1</td> <td>one</td> </tr> // <tr> <td>2</td> <td>two</td> </tr> // <tr> <td>3</td> <td>three</td> </tr> // </table> //
will be rendered approximately as:
|
# | number |
| 1 | one |
| 2 | two |
| 3 | three |
14.4.4 Escaping HTML Tags¶
In some cases, one needs to turn off interpreting HTML tags (<i>, <b>, etc.) as formatting, and rather include them as literal text in the generated documentation. This can be achieved by surrounding the text with the <nohtml>...</nohtml> tag. For example,
// Use the <nohtml><i></nohtml> tag (like <tt><nohtml><i>this</i></nohtml><tt>) // to write in <i>italic</i>.
will be rendered as “Use the <i> tag (like <i>this</i>) to write in italic.”
<nohtml>...</nohtml> will also prevent opp_neddoc from hyperlinking words that are accidentally the same as an existing module or message name. Prefixing the word with a backslash will achieve the same. That is, either of the following will do:
// In <nohtml>IP</nohtml> networks, routing is...
// In \IP networks, routing is...
Both will prevent hyperlinking the word IP in case there is an IP module in the project.
14.5 Incorporating Extra Content¶
14.5.1 Adding a Custom Title Page¶
The title page is the one that appears in the main frame after opening the documentation in the browser. By default, it contains a boilerplate text with the title “OMNeT++ Model Documentation”. Model authors will probably want to customize that and change the title to be more specific.
A title page is defined with a @titlepage directive. It needs to appear in a file-level comment.
- NOTE
A file-level comment is one that appears at the top of an NED file and is separated from any other NED content by at least one blank line.
While one can place the title page definition into any NED or MSG file, it is probably a good idea to create a dedicated NED file for it. Lines up to the next @page line or the end of the comment (whichever comes first) are interpreted as part of the page.
The page should start with a title since the documentation tool doesn't add one. Use the <h1>..</h1> HTML tag for that.
Example:
// // @titlepage // <h1>Ethernet Model Documentation</h1> // // This document describes the Ethernet model created by David Wu and refined by Andras // Varga at CTIE, Monash University, Melbourne, Australia. //
14.5.2 Adding Extra Pages¶
One can add new pages to the documentation using the @page directive. @page may appear in any file-level comment and has the following syntax:
// @page filename.html, Title of the Page
Choose a file name that doesn't collide with other files generated by the documentation tool. If the file name does not end in .html, it will be appended. The page title will appear at the top of the page as well as in the page index.
The lines after the @page line up to the next @page line or the end of the comment will be used as the page body. One does not need to add a title because the documentation tool automatically inserts the one specified in the @page directive.
Example:
// // @page structure.html, Directory Structure // // The model core model files and the examples have been placed // into different directories. The <tt>examples/</tt> directory... // // // @page examples.html, Examples // ... //
One can create links to the generated pages using standard HTML, using the <a href="...">...</a> tag. All HTML files are placed in a single directory, so one doesn't have to worry about directories.
Example:
// // @titlepage // ... // The structure of the model is described <a href="structure.html">here</a>. //
14.5.3 Incorporating Externally Created Pages¶
The @externalpage directive allows one to add externally created pages into the generated documentation. @externalpage may appear in a file-level comment and has a similar syntax as @page:
// @externalpage filename.html, Title of the Page
The directive causes the page to appear in the page index. However, the documentation tool does not check if the page exists, and it is the user's responsibility to copy the file into the directory of the generated documentation.
External pages can be linked to from other pages using the <a href="...">...</a> tag.
14.5.4 File Inclusion¶
The @include directive allows one to include the content of a file into a documentation comment. @include expects a file name or path; if a relative path is given, it is interpreted as relative to the file that includes it.
The line of the @include directive will be replaced by the content of the file. The lines of the included file do not need to start with //, but otherwise, they are processed in the same way as the NED comments. They can include other files, but circular includes are not allowed.
// ... // @include ../copyright.txt // ...
14.5.5 Extending Type Pages with Extra Content¶
Sometimes it is useful to customize the generated documentation pages that describe NED and MSG types by adding extra content. It is possible to provide a documentation fragment file in XML format that can be used by the documentation tool to add it to the generated documentation.
The fragment file may contain multiple top-level <docfragment> elements in the XML file's root element. Each <docfragment> element must have one of the nedtype, msgtype, or filename attributes depending on which page it extends. Additionally, it must provide an anchor attribute to define a point in the page where the fragment's content should be inserted. The content of the fragment must be provided in a <![CDATA[]]> section.
<docfragments>
<docfragment nedtype="fully.qualified.NEDTypeName" anchor="after-signals">
<![CDATA[
<h3 class="subtitle">Doc fragment after the signals section</h3>
...
]]>
</docfragment>
<docfragment msgtype="fully.qualified.MSGType" anchor="top">
<![CDATA[
<h3 class="subtitle">Doc fragment at the top of the MSG type page</h3>
...
]]>
</docfragment>
<docfragment filename="project_relative_path/somefile.msg" anchor="bottom">
<![CDATA[
<h3 class="subtitle">Doc fragment at the end of the file listing page</h3>
...
]]>
</docfragment>
</docfragments>
Possible attribute values:
- nedtype: Fully qualified NED type name.
- msgtype: Fully qualified MSG type name.
- filename: Project relative file path of a NED or MSG source file. The fragment will be inserted on the file's source listing page.
- anchor: Specifies the place where the content should be inserted. Possible values for NED type: top, after-types, after-description, after-image, after-diagrams, after-usage, after-inheritance, after-parameters, after-properties, after-gates, after-signals, after-statistics, after-unassigned-parameters, bottom; for MSG type: top, after-description, after-diagrams, after-inheritance, after-fields, after-properties, bottom; for file listing: top, after-types, bottom
15 Testing¶
15.1 Overview¶
15.1.1 Verification, Validation¶
Correctness of the simulation model is a primary concern of the developers and users of the model, because they want to obtain credible simulation results. Verification and validation are activities conducted during the development of a simulation model with the ultimate goal of producing an accurate and credible model.
- Verification of a model is the process of confirming that it is implemented correctly according to the conceptual model. This means that it matches the specifications and assumptions deemed acceptable for the intended purpose of application. During verification, the model is tested to identify and fix errors in its implementation.
- Validation checks the accuracy of the model in representing the real system. Model validation is defined as the “substantiation that a computerized model within its domain of applicability possesses a satisfactory range of accuracy consistent with the intended application of the model”. A model should be constructed for a specific purpose or set of objectives, and its validity determined for that purpose.
Of the two, verification is essentially a software engineering issue, so it can be assisted with tools used for software quality assurance, for example testing tools. Validation, on the other hand, is not a software engineering issue.
15.1.2 Unit Testing, Regression Testing¶
As mentioned earlier, software testing techniques can significantly aid in model verification. Testing can also help ensure that a simulation model, once validated and verified, remains correct for an extended period.
Software testing is an independent discipline with various techniques and methodologies. Here, we will only mention two types that are relevant to us: regression testing and unit testing.
- Regression testing is a technique that aims to uncover new software bugs, or regressions, in existing areas of a system after changes such as enhancements, patches, or configuration changes have been made to them.
- Unit testing is a method in which individual units of source code are tested to determine if they are suitable for use. In an object-oriented environment, this is usually done at the class level.
The two may overlap; for example, unit tests are also useful for detecting regressions.
One way to perform regression testing on an OMNeT++ simulation model is to record the log produced during simulation and compare it to a pre-recorded log. However, code refactoring may change the log in nontrivial ways, making it impossible to compare it to the pre-recorded one. Alternatively, one can compare only the result files or certain simulation results, avoiding the effects of refactoring, but some regressions may go undetected. Such tradeoffs are typical in regression testing.
Unit testing of simulation models can be done at the class or module level. There are many open-source unit testing frameworks for C++, such as CppUnit, Boost Test, Google Test, and UnitTest++, to name a few. They are well-suited for class-level testing. However, applying them to module testing can be cumbersome due to the peculiarities of the domain (network simulation) and OMNeT++.
A test in an xUnit-type testing framework (a collective name for CppUnit-style frameworks) operates with various assertions to test function return values and object states. This approach is challenging to apply in the testing of OMNeT++ modules, which often operate in a complex environment (cannot be easily instantiated and operated in isolation), respond to various events (messages, packets, signals, etc.), and have complex dynamic behavior and substantial internal state.
Subsequent sections will introduce opp_test, a tool provided by OMNeT++ to assist with various testing tasks, and summarize various testing methods useful for testing simulation models.
15.2 The opp_test Tool¶
15.2.1 Introduction¶
This section documents opp_test, a versatile tool that is helpful for various testing scenarios. opp_test can be used for various types of tests, including unit tests and regression tests. It was originally written for testing the OMNeT++ simulation kernel, but it is equally suited for testing functions, classes, modules, and whole simulations.
opp_test is built around a simple concept: it allows the user to define simulations in a concise way, run them, and check that the output (result files, log, etc.) matches a predefined pattern or patterns. In many cases, this approach works better than inserting various assertions into the code (which is still also an option).
Each test is a single file with the .test file extension. All NED code, C++ code, ini files, and other data necessary to run the test case, as well as the PASS criteria, are packed together in the test file. Such self-contained tests are easier to handle and also encourage authors to write tests that are compact and to the point.
Let's see a small test file, cMessage_properties_1.test:
%description:
Test the name and length properties of cPacket.
%activity:
cPacket *pk = new cPacket();
pk->setName("ACK");
pk->setByteLength(64);
EV << "name: " << pk->getName() << endl;
EV << "length: " << pk->getByteLength() << endl;
delete pk;
%contains: stdout
name: ACK
length: 64
What this test says is this: create a simulation with a simple module that has the above C++ code block as the body of the activity() method, and when run, it should print the text after the %contains line.
To run this test, we need a control script, for example runtest from the omnetpp/test/core directory. runtest itself relies on the opp_test tool.
- NOTE
The control script is not part of OMNeT++ because it is somewhat specific to the simulation model or framework being tested, but it is usually trivial to write. A later section will explain how to write the control script.
The output will be similar to this one:
$ ./runtest cMessage_properties_1.test opp_test: extracting files from *.test files into work... Creating Makefile in omnetpp/test/core/work... cMessage_properties_1/test.cc Creating executable: out/gcc-debug/work opp_test: running tests using work.exe... *** cMessage_properties_1.test: PASS ======================================== PASS: 1 FAIL: 0 UNRESOLVED: 0 Results can be found in work/
This was a passing test. What would constitute a failure?
- crash
- simulation runtime error
- nonzero exit code (a simulation runtime error is also detected by nonzero exit code)
- the output doesn't match the expectation (there are several possibilities for expressing what is expected: multiple match criteria, literal string vs regex, positive vs negative match, matching against the standard output, standard error, or any file, etc.)
One normally wants to run several tests together. The runtest script accepts several .test files on the command line, and when started without arguments, it defaults to *.test, all test files in the current directory. At the end of the run, the tool prints summary statistics (number of tests passed, failed, and unresolved).
An example run from omnetpp/test/core (some lines were removed from the output, and one test was changed to show a failure):
$ ./runtest cSimpleModule-*.test opp_test: extracting files from *.test files into work... Creating Makefile in omnetpp/test/core/work... [...] Creating executable: out/gcc-debug/work opp_test: running tests using work... *** cSimpleModule_activity_1.test: PASS *** cSimpleModule_activity_2.test: PASS [...] *** cSimpleModule_handleMessage_2.test: PASS *** cSimpleModule_initialize_1.test: PASS *** cSimpleModule_multistageinit_1.test: PASS *** cSimpleModule_ownershiptransfer_1.test: PASS *** cSimpleModule_recordScalar_1.test: PASS *** cSimpleModule_recordScalar_2.test: FAIL (test-1.sca fails %contains-regex(2) rule) expected pattern: >>>>run General-1-.*? scalar Test one 24.2 scalar Test two -1.5888<<<< actual output: >>>>version 2 run General-1-20141020-11:39:34-1200 attr configname General attr datetime 20141020-11:39:34 attr experiment General attr inifile _defaults.ini [...] scalar Test one 24.2 scalar Test two -1.5 <<<< *** cSimpleModule_recordScalar_3.test: PASS *** cSimpleModule_scheduleAt_notowner_1.test: PASS *** cSimpleModule_scheduleAt_notowner_2.test: PASS [...] ======================================== PASS: 36 FAIL: 1 UNRESOLVED: 0 FAILED tests: cSimpleModule_recordScalar_2.test Results can be found in work/
Note that code from all tests was linked to form a single executable, which saves time and disk space compared to per-test executables or libraries.
A test file like the one above is useful for unit testing of classes or functions. However, as we will see, the test framework provides further facilities that make it convenient for testing modules and whole simulations as well. The following sections go into details about the syntax and features of .test files, about writing the control script, and give advice on how to cover several use cases with the opp_test tool.
15.2.2 Terminology¶
The next sections will use the following terminology:
- test file: A file with the .test extension that opp_test understands.
- test tool: The opp_test program
- control script: A script that relies on opp_test to run the tests. The control script is not part of OMNeT++ because it usually needs to be somewhat specific to the simulation model or framework being tested.
- test program: The simulation program whose output is checked by the test. It is usually work/work (work/work.exe on Windows). However, it is also possible to let the control script build a dynamic library from the test code, and then use e.g. opp_run as the test program.
- test directory: The directory where a .test file is extracted; usually work/<testname>/. It is also set as the working directory for running the test program.
15.2.3 Test File Syntax¶
Test files are composed of %-directives of the following syntax:
%<directive>: <value> <body>
The body extends up to the next directive (the next line starting with %), or to the end of the file. Some directives require a value, others a body, or both.
Certain directives, e.g. %contains, may occur several times in the file.
15.2.4 Test Description¶
Syntax:
%description: <test-description-lines>
%description is customarily written at the top of the .test file and allows one to provide a multi-line comment about the purpose of the test. It is recommended to invest time in well-written descriptions because they make determining the original purpose of a test that has become broken significantly easier.
15.2.5 Test Code Generation¶
This section describes the directives used for creating C++ source and other files in the test directory.
15.2.5.1 %activity¶
Syntax:
%activity: <body-of-activity()>
%activity lets one write test code without much boilerplate. The directive generates a simple module that contains a single activity() method with the given code as the method body.
A NED file containing the simple module's (bare-bones) declaration, and an ini file to set up the module as a network are also generated.
15.2.5.2 %module¶
Syntax:
%module: <modulename> <simple-module-C++-definition>
%module lets one define a module class and run it as the only module in the simulation.
A NED file containing the simple module's (bare-bones) declaration, and an ini file to set up the module as a network are also generated.
15.2.5.3 %includes, %global¶
Syntax:
%includes: <#include directives>
%global: <global-code-pasted-before-activity>
%includes and %global are helpers for %activity and %module, and let one insert additional lines into the generated C++ code.
Both directives insert the code block above the module C++ declaration. The only difference is in their relation to the C++ namespace: the body of %includes is inserted above (i.e., outside) the namespace, and the body of %globals is inserted inside the namespace.
15.2.5.4 The Default Ini File¶
The following ini file is always generated:
[General] network = <network-name> cmdenv-express-mode = false
The network name in the file is chosen to match the module generated with %activity or %module; if they are absent, it will be Test.
15.2.5.5 %network¶
Syntax:
%network: <network-name>
This directive can be used to override the network name in the default ini file.
15.2.5.6 %file, %inifile¶
Syntax:
%file: <file-name> <file-contents>
%inifile: [<inifile-name>] <inifile-contents>
%file saves a file with the given file name and content into the test's extraction folder in the preparation phase of the test run. It is customarily used for creating NED files, MSG files, ini files, and extra data files required by the test. There can be several %file sections in the test file.
%inifile is similar to %file in that it also saves a file with the given file name and content, but it additionally also adds the file to the simulation's command line, causing the simulation to read it as an (extra) ini file. There can be several %inifile sections in the test file.
The default ini file is always generated.
15.2.5.7 The @TESTNAME@ Macro¶
In test files, the string @TESTNAME@ will be replaced with the test case name. Since it is substituted everywhere (C++, NED, msg, and ini files), one can also write things like @TESTNAME@_function() or printf("this is @TESTNAME@\n").
15.2.5.8 Avoiding C++ Name Clashes¶
Since all sources are compiled into a single test executable, actions have to be taken to prevent accidental name clashes between C++ symbols in different test cases. A good way to ensure this is to place all code into namespaces named after the test cases.
namespace @TESTNAME@ {
...
};
This is done automatically for the %activity, %module, and %global blocks, but for other files (e.g., source files generated via %file), that needs to be done manually.
15.2.6 PASS Criteria¶
15.2.6.1 %contains, %contains-regex, %not-contains, %not-contains-regex¶
Syntax:
%contains: <output-file-to-check> <multi-line-text>
%contains-regex: <output-file-to-check> <multi-line-regexp>
%not-contains: <output-file-to-check> <multi-line-text>
%not-contains-regex: <output-file-to-check> <multi-line-regexp>
These directives let one check for the presence (or absence) of certain text in the output. One can check a file, or the standard output or standard error of the test program; for the latter two, stdout and stderr need to be specified as file names, respectively. If the file is not found, the test will be marked as an error. There can be several %contains-style directives in the test file.
The text or regular expression can be multi-line. Before matching is attempted, trailing spaces are removed from all lines in both the pattern and the file contents; leading and trailing blank lines in the patterns are removed; and any substitutions are performed (see %subst). Perl-style regular expressions are accepted.
To facilitate debugging of tests, the text/regex blocks are saved into the test directory.
15.2.6.2 %subst¶
Syntax:
%subst: /<search-regex>/<replacement>/<flags>
It is possible to apply text substitutions to the output before it is matched against expected output. This is done with the %subst directive; there can be more than one %subst in a test file. It takes a Perl-style regular expression to search for, a replacement text, and flags, in the /search/replace/flags syntax. Flags can be empty or a combination of the letters i, m, and s, for case-insensitive, multi-line, or single-string match (see the Perl regex documentation.)
%subst was primarily invented to deal with differences in printf output across platforms and compilers: different compilers print infinite and not-a-number in different ways: 1.#INF, inf, Inf, -1.#IND, nan, NaN, etc. With %subst, they can be brought to a common form:
%subst: /-?1\.#INF/inf/ %subst: /-?1\.#IND/nan/ %subst: /-?1\.#QNAN/nan/ %subst: /-?NaN/nan/ %subst: /-?nan/nan/
15.2.6.3 %exitcode, %ignore-exitcode¶
Syntax:
%exitcode: <one-or-more-numeric-exit-codes>
%ignore-exitcode: 1
%exitcode and %ignore-exitcode let one test the exit code of the test program. The former checks that the exit code is one of the numbers specified in the directive; the latter makes the test framework ignore the exit code.
OMNeT++ simulations exit with zero if the simulation terminated without an error, and some >0 code if a runtime error occurred. Normally, a nonzero exit code makes the test fail. However, if the expected outcome is a runtime error (e.g., for some negative test cases), one can use either %exitcode to express that or specify %ignore-exitcode and test for the presence of the correct error message in the output.
15.2.6.4 %file-exists, %file-not-exists¶
Syntax:
%file-exists: <filename>
%file-not-exists: <filename>
These directives test for the presence or absence of a certain file in the test directory.
15.2.7 Extra Processing Steps¶
15.2.7.1 %env, %extraargs, %testprog¶
Syntax:
%env: <environment-variable-name>=<value>
%extraargs: <argument-list>
%testprog: <executable>
The %env directive lets one set an environment variable that will be defined when the test program and the potential pre- and post-processing commands run. There can be multiple %env directives in the test file.
%extraargs lets one add extra command-line arguments to the test program (usually the simulation) when it is run.
The %testprog directive lets one replace the test program. %testprog also slightly alters the arguments the test program is run with. Normally, the test program is launched with the following command line:
$ <default-testprog> -u Cmdenv <test-extraargs> <global-extraargs> <inifiles>
When %testprog is present, it becomes the following:
$ <custom-testprog> <test-extraargs> <global-extraargs>
That is, -u Cmdenv and <inifilenames> are removed; this allows one to invoke programs that do not require or understand them and puts the test author in complete command of the arguments list.
Note that %extraargs and %testprog have an equivalent command-line option in opp_test. (In the text above, <global-extraargs> stands for extra args specified to opp_test.) %env doesn't need an option in opp_test because the test program inherits the environment variables from opp_test, so one can just set them in the control script or in the shell one runs the tests from.
15.2.7.2 %prerun-command, %postrun-command¶
Syntax:
%prerun-command: <command>
%postrun-command: <command>
These directives let one run extra commands before/after running the test program (i.e., the simulation). There can be multiple pre- and post-run commands. The post-run command is useful when the test outcome cannot be determined by simple text matching but requires statistical evaluation or other processing.
If the command returns a nonzero exit code, the test framework will assume that it is due to a technical problem (as opposed to test failure) and count the test as an error. To make the test fail, let the command write a file and match the file's contents using %contains & co.
If the post-processing command is a short script, it is practical to add it into the .test file via the %file directive, and invoke it via its interpreter. For example:
%postrun-command: python test.py %file: test.py <Python script>
Or:
%postrun-command: R CMD BATCH test.R %file: test.R <R script>
If the script is very large or shared among several tests, it is more practical to place it into a separate file. The test command can find the script e.g., by a relative path or by referring to an environment variable that contains its location or full path.
15.2.8 Error¶
A test case is considered to be in error if the test program cannot be executed at all, the output cannot be read, or some other technical problem occurred.
15.2.9 Expected Failure¶
%expected-failure can be used in the test file to force a test case to ignore a failure. If a test case marked with %expected-failure fails, it will be counted as expectfail instead of fail. opp_test will return successfully if no test cases reported fail or error results.
Syntax:
%expected-failure: <single-line-reason-for-allowing-a-failure>
15.2.10 Skipped¶
A test case can be skipped if the current system configuration does not allow its execution (e.g., certain optional features are not present). Skipping is done by printing #SKIPPED or #SKIPPED:some-explanation on the standard output, at the beginning of the line.
15.2.11 opp_test Synopsis¶
Little has been said so far about what opp_test actually does or how it is meant to be run. opp_test has two modes: file generation and test running. When running a test suite, opp_test is actually run twice, once in file generation mode and then in test running mode.
File generation mode has the syntax opp_test gen <options> <testfiles>. For example:
$ opp_test gen *.test
This command will extract C++ and NED files, ini files, etc., from the .test files into separate files. All files will be created in a work directory (which defaults to ./work/), and each test will have its own subdirectory under ./work/.
The second mode, test running, is invoked as opp_test run <options> <testfiles>. For example:
$ opp_test run *.test
In this mode, opp_test will run the simulations, check the results, and report the number of passes and failures. The way of invoking simulations (which executable to run, the list of command-line arguments to pass, etc.) can be specified to opp_test via command-line options.
- NOTE
Run opp_test in your OMNeT++ installation to get the exact list of command-line options.
The simulation needs to have been built from source before opp_test run can be issued. Usually, one would employ a command similar to
$ cd work; opp_makemake --deep; make
to achieve that.
15.2.12 Writing the Control Script¶
Usually, one writes a control script to automate the two invocations of opp_test and the build of the simulation model between them.
A basic variant would look like this:
#! /bin/sh opp_test gen -v *.test || exit 1 (cd work; opp_makemake -f --deep; make) || exit 1 opp_test run -v *.test
For any practical use, the test suite needs to refer to the codebase being tested. This means that the codebase must be added to the include path, must be linked with, and the NED files must be added to the NED path. The first two can be achieved by the appropriate parameterization of opp_makemake, and the last one can be done by setting and exporting the NEDPATH environment variable in the control script.
For inspiration, check out runtest in the omnetpp/test/core directory and a similar script used in the INET Framework.
Further sections describe how one can implement various types of tests in OMNeT++.
15.3 Smoke Tests¶
Smoke tests are a tool for basic verification and regression testing. Essentially, the simulation is run for a period of time without crashing or experiencing any runtime errors. Naturally, smoke test provide very low confidence in the model, but in turn they are simple to implement.
Automation is crucial. The INET Framework includes a script that can run all or selected simulations defined in a CSV file, which includes columns such as the working directory and the command to run. The script also generates a report of the results. It can easily be customized for other models or model frameworks.
15.4 Fingerprint Tests¶
Fingerprint tests are a low-cost but effective tool for regression testing simulation models. A fingerprint is a hash computed from various properties of simulation events, messages, and statistics. The hash value is continuously updated as the simulation executes, and thus, the final fingerprint value is a characteristic of the simulation's trajectory. For regression testing, one needs to compare the computed fingerprints to those from a reference run -- if they differ, the simulation trajectory has changed. In general, fingerprint tests are very useful for ensuring that a change (such as refactoring, bugfix, or a new feature) hasn't broken the simulation.
15.4.1 Fingerprint Computation¶
Technically, providing a fingerprint option in the config file or on the command line (-fingerprint=...) will enable fingerprint computation in the OMNeT++ simulation kernel. When the simulation terminates, OMNeT++ compares the computed fingerprints with the provided ones, and if they differ, an error is generated.
15.4.1.1 Ingredients¶
The fingerprint computation algorithm allows controlling what is included in the hash value. Changing the ingredients allows one to make the fingerprint sensitive to certain changes while keeping it immune to others.
The ingredients of a fingerprint are usually indicated after a / sign following the hexadecimal hash value. Each ingredient is identified with a letter. For example, t stands for simulation time. Thus, the following omnetpp.ini line
fingerprint = 53de-64a7/tplx
means that a fingerprint needs to be computed with the simulation time, the module's full path, received packet's bit length, the extra data included for each event, and the result should be 53de-64a7.
The full list of fingerprint ingredients:
- e : event number
- t : simulation time
- n : message/event full name
- c : message/event class name
- k : message kind
- l : message (packet) bit length
- o : message control info class name
- d : message data
- i : module id
- m : module full name (name with index)
- p : module full path (hierarchical name)
- a : module class name
- r : random numbers drawn
- s : scalar results
- z : statistic results (histogram, etc.)
- v : vector results
- x : extra data added programmatically
- y : display strings
- f : canvas figures
- 0 : clean hasher
Ingredients may also be specified with the fingerprint-ingredients configuration option. However, that is rarely necessary because the ingredients list included in the fingerprints takes precedence and is also more convenient to use.
15.4.1.2 Multiple Fingerprints, Alternative Values¶
It is possible to specify more than one fingerprint, separated by commas, each with different ingredients. This will cause OMNeT++ to compute multiple fingerprints, and all of them must match for the test to pass. For example:
fingerprint = 53de-64a7/tplx, 9a3f-7ed2/szv
Occasionally, the same simulation gives a different fingerprint when run on
a different processor architecture or platform. This is due to subtle
differences in floating-point arithmetic across platforms.
- [There
are differences between the floating point operations of AMD and Intel
CPUs. Running under a processor emulator like valgrind may also
produce a different fingerprint. This is normal. Hint: see gcc options
-mfpmath=sse -msse2.]
fingerprint = 53de-64a7/tplx 63dc-ff21/tplx, 9a3f-7ed2/szv da39-91fc/szv
Note that fingerprint computation has been changed and significantly
extended in OMNeT++ version 5.0.
- [The old (OMNeT++ 4.x) fingerprint
was computed from the module ID and simulation time of each event. To
reproduce a 4.x fingerprint on OMNeT++ 5.0 or later, compile OMNeT++ and the
model with USE_OMNETPP4x_FINGERPRINTS defined. Simply setting the
ingredients to ti is not enough because of additional, subtle changes
in the simulation kernel.]
15.4.1.3 Further Filtering¶
It is also possible to filter which modules, statistics, etc. are included in the fingerprints. The fingerprint-events, fingerprint-modules, and fingerprint-results options filter events, modules, and statistical results, respectively. These options take wildcard expressions that are matched against the corresponding object before including its property in the fingerprint. These filters are mainly useful to limit fingerprint computation to certain parts of the simulation.
15.4.1.4 Programmatic Access¶
cFingerprintCalculator is the class responsible for fingerprint computation. The current fingerprint computation object can be retrieved from cSimulation using the getFingerprintCalculator() member function. This method will return nullptr if fingerprint computation is turned off for the current simulation run.
To contribute data to the fingerprint, cFingerprintCalculator has several addExtraData() methods for various data types (string, long, double, byte array, etc.)
An example (note that we check the pointer for nullptr to decide whether a fingerprint is being computed):
cFingerprintCalculator *fingerprint = getSimulation()->getFingerprintCalculator();
if (fingerprint) {
fingerprint->addExtraData(retryCount);
fingerprint->addExtraData(rttEstimate);
}
Data added using addExtraData() will only be counted in the fingerprint if the list of fingerprint ingredients contains x (otherwise addExtraData() does nothing).
15.4.2 Fingerprint Tests¶
The INET Framework also contains a script for automated fingerprint tests. The script runs all or selected simulations defined in a CSV file (with columns like the working directory, the command to run, the simulation time limit, and the expected fingerprints), and reports the results. The script is extensively used during INET Framework development to detect regressions and can be easily adapted to other models or model frameworks.
Excerpt from a CSV file that prescribes fingerprint tests to run:
examples/aodv/, ./run -f omnetpp.ini -c Static, 50s, 4c29-95ef/tplx examples/aodv/, ./run -f omnetpp.ini -c Dynamic, 60s, 8915-f239/tplx examples/dhcp/, ./run -f omnetpp.ini -c Wired, 800s, e88f-fee0/tplx examples/dhcp/, ./run -f omnetpp.ini -c Wireless, 500s, faa5-4111/tplx
15.5 Unit Tests¶
If a simulation model contains units of code (classes, functions) smaller than a module, they are candidates for unit testing. For a network simulation model, examples of such classes are network addresses, fragmentation reassembly buffers, queues, various caches and tables, serializers and deserializers, checksum computation, etc.
Unit tests can be implemented as .test files using the opp_test tool (the %activity directive is especially useful here), or with potentially any other C++ unit testing framework.
When using .test files, the build part of the control script needs to be set up so that it adds the tested library's source folder(s) to the include path, and also links the library to the test code.
15.6 Module Tests¶
OMNeT++ modules are not as easy to unit test as standalone classes because they typically assume a more complex environment, and, especially modules that implement network protocols, participate in more complex interactions than the latter.
To test a module in isolation, one needs to place it into a simulation where the module's normal operation environment (i.e., other modules it normally communicates with) is replaced by mock objects. Mock objects are responsible for providing stimuli for the module under test and (partly) for checking the response.
Module tests may be implemented in .test files using the opp_test tool. A .test file allows one to place the test description, test setup, and expected output into a single, compact file, while large files or files shared among several tests may be factored out and only referenced by .test files.
15.7 Statistical Tests¶
Statistical tests are tests where the outcome is determined based on statistical properties of the simulation results.
Statistical tests can be used for validation as well as regression testing.
15.7.1 Validation Tests¶
Validation tests aim to verify that simulation results correspond to some reference values, ideally those obtained from the real system. In practice, reference values can come from physical measurements, theoretical values, or results from another simulator.
15.7.2 Statistical Regression Tests¶
After refactoring that changes the simulation trajectory (e.g. eliminating or introducing extra events, or changes in RNG usage), there may be no other way to perform regression testing than to check that the model produces statistically the same results as before.
For statistical regression tests, one needs to run multiple simulations with the same configuration but different RNG seeds, and verify that the results follow the same distributions as before. Student's t-test (for mean) and the F-test (for variance) can be used to check if the “before” and the “after” result sets are from the same distribution.
15.7.3 Implementation¶
Statistical software like GNU R is extremely useful for performing these tests.
Statistical tests can also be implemented in .test files. To run several simulations within one test, use %extraargs to pass the $2-r <runs> option to Cmdenv; alternatively, %testprog can be used to have the test tool run opp_runall instead of the normal simulation program. For performing statistical computations, use %postrun-command to run a Python or R script. The Python script may rely on the Pandas, SciPy, and omnetpp.scave packages for reading and evaluating OMNeT++ result files.
The INET Framework contains statistical tests that can provide inspiration.
16 Parallel Distributed Simulation¶
16.1 Introduction to Parallel Discrete Event Simulation¶
OMNeT++ supports parallel execution of large simulations. This section provides a brief overview of the problems and methods of parallel discrete event simulation (PDES). Interested readers are strongly encouraged to refer to the literature.
For parallel execution, the model is divided into several LPs (logical processes) that are simulated independently on different hosts or processors. Each LP maintains its own local Future Event Set and simulation time. The main issue with parallel simulations is synchronizing the LPs to avoid violating event causality. Without synchronization, a message sent by one LP could arrive in another LP when the simulation time in the receiving LP has already passed the timestamp (arrival time) of the message. This would disrupt event causality in the receiving LP.
There are two broad categories of parallel simulation algorithms that differ in how they handle the aforementioned causality problems:
- Conservative algorithms: These algorithms prevent incausalities from
occurring. The Null Message Algorithm utilizes knowledge of when LPs send
messages to other LPs and uses special null messages to propagate
this information. If an LP knows it won't receive any messages from other LPs
until t+Δ t, it can advance until t+Δ t without external
synchronization. Conservative simulation tends to converge to sequential
simulation, albeit slowed down by communication between LPs, if there is
insufficient parallelism in the model or if parallelism is not exploited by
sending a sufficient number of null messages.
- Optimistic synchronization: These algorithms allow incausalities to occur but detect and repair them. Repairing may involve rollbacks to a previous state, sending out anti-messages to cancel messages sent during the rolled-back period, and so on. Implementing optimistic synchronization is extremely difficult as it requires periodic state saving and the ability to restore previous states. Furthermore, enabling optimistic synchronization in OMNeT++ would require a more complex simulation kernel and significantly more complex simple module code from the user. Optimistic synchronization may be slow in cases of excessive rollbacks.
16.2 Assessing Available Parallelism in a Simulation Model¶
OMNeT++ currently supports conservative synchronization via the classic Chandy-Misra-Bryant (or null message) algorithm [chandymisra79]. To assess how efficiently a simulation can be parallelized with this algorithm, we'll need the following variables:
- P performance represents the number of events processed per
second (ev/sec).
- [Notations: ev: events, sec: real seconds,
simsec: simulated seconds]
- E event density is the number of events that occur per simulated second (ev/simsec). E depends on the model only, and not where the model is executed. E is determined by the size, the detail level, and also the nature of the simulated system (e.g., cell-level ATM models produce higher E values than call center simulations.)
- R relative speed measures the simulation time advancement per second (simsec/sec). R strongly depends on both the model and on the software/hardware environment where the model executes. Note that R = P/E.
- L lookahead is measured in simulated seconds (simsec). When simulating telecommunication networks and using link delays as lookahead, L is typically in the range of milliseconds to microseconds.
- τ latency (sec) characterizes the parallel simulation hardware. τ is the latency of sending a message from one LP to another. τ can be determined using simple benchmark programs. The authors' measurements on a Linux cluster interconnected via a 100Mb Ethernet switch using MPI yielded τ = 22μs which is consistent with measurements reported in [ongfarrell2000]. Specialized hardware such as Quadrics Interconnect [quadrics] can provide τ = 5μs or better.
In large simulation models, P, E, and R usually stay relatively constant (that is, display little fluctuations over time). They are also intuitive and easy to measure. The OMNeT++ displays these values on the GUI while the simulation is running, see Figure below. Cmdenv can also be configured to display these values.

After obtaining approximate values of P, E, L, and τ, calculate the λ coupling factor as the ratio of LE and τ P:
λ = (LE) / (τ P)
Without going into the details: if the resulting λ value is at least larger than one, but rather in the range of 10 to 100, there is a good chance that the simulation will perform well when run in parallel. With λ < 1, poor performance is guaranteed. For details see the paper [ParsimCrit03].
16.3 Parallel Distributed Simulation Support in OMNeT++¶
16.3.1 Overview¶
This chapter presents the parallel simulation architecture of OMNeT++. The design allows simulation models to be executed in parallel without code modification -- it only requires configuration. The implementation relies on the approach of placeholder modules and proxy gates to instantiate the model on different LPs -- the placeholder approach allows simulation techniques such as topology discovery and direct message sending to work unmodified with PDES. The architecture is modular and extensible, so it can serve as a framework for research on parallel simulation.
The OMNeT++ design places a strong emphasis on the separation of models from experiments. The main rationale is that a large number of simulation experiments usually need to be performed on a single model before any conclusion can be drawn about the real system. Experiments tend to be ad-hoc and change much more frequently than simulation models; thus, it is a natural requirement to be able to carry out experiments without disrupting the simulation model itself.
Following this principle, OMNeT++ allows simulation models to be executed in parallel without modification. No special instrumentation of the source code or the topology description is required, as partitioning and other PDES configurations are fully described in the configuration files.
OMNeT++ supports the Null Message Algorithm with static topologies, using link delays as lookahead. The laziness of null message sending can be adjusted. The Ideal Simulation Protocol (ISP) introduced by Bagrodia in 2000 [bagrodia00] is also supported. ISP is a powerful research vehicle for measuring the efficiency of PDES algorithms, both optimistic and conservative. Specifically, it helps determine the maximum achievable speedup by any PDES algorithm for a particular model and simulation environment. In OMNeT++, ISP can be used to benchmark the performance of the Null Message Algorithm. Additionally, models can be executed without any synchronization, which can be useful for educational purposes (to demonstrate the need for synchronization) or for simple testing.
For communication between LPs (logical processes), OMNeT++ primarily uses MPI, the Message Passing Interface standard [mpiforum94]. An alternative communication mechanism is based on named pipes, which can be used on shared memory multiprocessors without the need to install MPI. Additionally, a file system-based communication mechanism is also available. It communicates via text files created in a shared directory, and can be useful for educational purposes (to analyze or demonstrate messaging in PDES algorithms) or to debug PDES algorithms. The implementation of a shared memory-based communication mechanism is also planned for the future to fully exploit the power of multiprocessors without the overhead and the need to install MPI.
For the model to be able to make use of parallel simulation, it must meet the following requirements:
- Modules may communicate only via sending messages (no direct method calls or member access) unless mapped to the same processor.
- No global variables are allowed.
- There are some limitations on direct sending (no sending to a submodule of another module, unless mapped to the same processor).
- Lookahead must be present in the form of link delays.
- Currently, only static topologies are supported (we are working on a research project aimed at eliminating this limitation).
PDES support in OMNeT++ follows a modular and extensible architecture. New communication mechanisms can be added by implementing a compact API (expressed as a C++ class) and registering the implementation. After that, the new communication mechanism can be selected for use in the configuration.
New PDES synchronization algorithms can be added in a similar way. PDES algorithms are also represented by C++ classes that have to implement a very small API to integrate with the simulation kernel. Setting up the model on various LPs as well as relaying model messages across LPs is already taken care of and not something the implementation of the synchronization algorithm needs to worry about (although it can intervene if needed because the necessary hooks are provided).
The implementation of the Null Message Algorithm is also modular in itself, as the lookahead discovery can be plugged in via a defined API. Currently, implemented lookahead discovery uses link delays, but it is possible to implement more sophisticated approaches and select them in the configuration.
16.3.2 Parallel Simulation Example¶
We will use the Parallel CQN example simulation to demonstrate the PDES capabilities of OMNeT++. The model consists of N tandem queues where each tandem consists of a switch and k single-server queues with exponential service times (Figure below). The last queues are looped back to their switches. Each switch randomly chooses the first queue of one of the tandems as the destination, using a uniform distribution. The queues and switches are connected with links that have nonzero propagation delays. Our OMNeT++ model for CQN wraps tandems into compound modules.

To run the model in parallel, we assign tandems to different LPs (Figure below). Lookahead is provided by delays on the marked links.

To run the CQN model in parallel, we have to configure it for parallel execution. In OMNeT++, the configuration is in the omnetpp.ini file. For configuration, first we have to specify partitioning, that is, assign modules to processors. This is done by the following lines:
[General] *.tandemQueue[0]**.partition-id = 0 *.tandemQueue[1]**.partition-id = 1 *.tandemQueue[2]**.partition-id = 2
The numbers after the equal sign identify the LP.
Then we have to select the communication library and the parallel simulation algorithm, and enable parallel simulation:
[General] parallel-simulation = true parsim-communications-class = "cMPICommunications" parsim-synchronization-class = "cNullMessageProtocol"
When the parallel simulation is run, LPs are represented by multiple running instances of the same program. When using LAM-MPI [lammpi], the mpirun program (part of LAM-MPI) is used to launch the program on the desired processors. When named pipes or file communications is selected, the opp_prun OMNeT++ utility can be used to start the processes. Alternatively, one can run the processes manually (the -p flag tells OMNeT++ the index of the given LP and the total number of LPs):
./cqn -p0,3 & ./cqn -p1,3 & ./cqn -p2,3 &
For PDES, one will usually want to select the command-line user interface, and redirect the output to files. (OMNeT++ provides the necessary configuration options.)
The graphical user interface of OMNeT++ can also be used (as evidenced by Figure below), independently of the selected communication mechanism. The GUI interface can be useful for educational or demonstration purposes. OMNeT++ displays debugging output about the Null Message Algorithm, EITs and EOTs can be inspected, etc.
16.3.3 Placeholder Modules, Proxy Gates¶
When setting up a model partitioned into several LPs, OMNeT++ uses placeholder modules and proxy gates. In the local LP, placeholders represent sibling submodules that are instantiated on other LPs. With placeholder modules, every module has all of its siblings present in the local LP -- either as a placeholder or as the “real thing”. Proxy gates take care of forwarding messages to the LP where the module is instantiated (see Figure below).
The main advantage of using placeholders is that algorithms such as topology discovery embedded in the model can be used with PDES unmodified. Also, modules can use direct message sending to any sibling module, including placeholders. This is because the destination of direct message sending is an input gate of the destination module -- if the destination module is a placeholder, the input gate will be a proxy gate that transparently forwards the messages to the LP where the “real” module was instantiated. A limitation is that the destination of direct message sending cannot be a submodule of a sibling (which is probably a bad practice anyway, as it violates encapsulation), simply because placeholders are empty and thus, their submodules are not present in the local LP.
Instantiation of compound modules is slightly more complicated. Since submodules can be on different LPs, the compound module may not be “fully present” on any given LP, and it may have to be present on several LPs (wherever it has submodules instantiated). Thus, compound modules are instantiated wherever they have at least one submodule instantiated and are represented by placeholders anywhere else (Figure below).


16.3.4 Configuration¶
Parallel simulation configuration is set in the [General] section of omnetpp.ini.
The parallel distributed simulation feature can be enabled with the parallel-simulation boolean option.
The parsim-communications-class option selects the class that implements communication between partitions. The class must implement the cParsimCommunications interface.
The parsim-synchronization-class option selects the parallel simulation algorithm. The class must implement the cParsimSynchronizer interface.
The following two options configure the Null Message Algorithm, so they are only effective if cNullMessageProtocol has been selected as the synchronization class:
- parsim-nullmessageprotocol-lookahead-class
selects the lookahead class for the NMA; the class must be subclassed
from cNMPLookahead. The default class is cLinkDelayLookahead.
- parsim-nullmessageprotocol-laziness expects a number in the (0,1) interval (the default is 0.5), and it controls how often NMA should send out null messages; the value is understood in proportion to the lookahead, e.g., 0.5 means every lookahead/2 simsec.
The parsim-debug boolean option enables/disables printing log messages about the parallel simulation algorithm. It is turned on by default, but for production runs, we recommend turning it off.
Other configuration options configure MPI buffer sizes and other details; see options that begin with parsim- in Appendix [27].
When using cross-mounted home directories (where the simulation's directory is on a disk mounted on all nodes of the cluster), a useful configuration setting is:
[General] fname-append-host = true
This setting will cause the host names to be appended to the names of all output vector files, so that partitions don't overwrite each other's output files. (See section [11.20.3.3])
16.3.5 Design of PDES Support in OMNeT++¶
The design of PDES support in OMNeT++ follows a layered approach, with a modular and extensible architecture. The overall architecture is depicted in Figure below.

The parallel simulation subsystem is an optional component that can be removed from the simulation kernel if not needed. It consists of three layers, from bottom up: the Communications Layer, Partitioning Layer, and Synchronization Layer.
16.3.5.1 The Communications Layer¶
The purpose of the Communications Layer is to provide elementary messaging services between partitions for the upper layer. The services include send, blocking receive, nonblocking receive, and broadcast. The send/receive operations work with buffers, which encapsulate packing and unpacking operations for primitive C++ types. The message class and other classes in the simulation library can pack and unpack themselves into such buffers. The Communications Layer API is defined in the cParsimCommunications interface (abstract class); specific implementations like the MPI one (cMPICommunications) subclass this interface, encapsulating MPI send/receive calls. The matching buffer class cMPICommBuffer encapsulates MPI pack/unpack operations.
16.3.5.2 The Partitioning Layer¶
The Partitioning Layer is responsible for instantiating modules on different LPs according to the partitioning specified in the configuration and for configuring proxy gates. During the simulation, this layer also ensures that cross-partition simulation messages reach their destinations. It intercepts messages that arrive at proxy gates and transmits them to the destination LP using the services of the Communications Layer. The receiving LP unpacks the message and injects it at the gate the proxy gate points at. The implementation basically encapsulates the cParsimSegment, cPlaceholderModule, and cProxyGate classes.
16.3.5.3 The Synchronization Layer¶
The Synchronization Layer encapsulates the parallel simulation algorithm. Parallel simulation algorithms are also represented by classes, subclassed from the cParsimSynchronizer abstract class. The parallel simulation algorithm is invoked on the following hooks: event scheduling, processing model messages outgoing from the LP, and messages (model messages or internal messages) arriving from other LPs. The first hook, event scheduling, is a function invoked by the simulation kernel to determine the next simulation event; it also has full access to the future event set (FES) and can add/remove events for its own use. Conservative parallel simulation algorithms will use this hook to block the simulation if the next event is unsafe, e.g., the null message algorithm implementation (cNullMessageProtocol) blocks the simulation if an EIT has been reached until a null message arrives (see [bagrodia00] for terminology); it also uses this hook to periodically send null messages. The second hook is invoked when a model message is sent to another LP; the null message algorithm uses this hook to piggyback null messages on outgoing model messages. The third hook is invoked when any message arrives from other LPs, and it allows the parallel simulation algorithm to process its own internal messages from other partitions; the null message algorithm processes incoming null messages here.
The Null Message Protocol implementation itself is modular; it employs a separate, configurable lookahead discovery object. Currently, only link delay-based lookahead discovery has been implemented, but it is possible to implement more sophisticated types.
The Ideal Simulation Protocol (ISP; see [bagrodia00]) implementation consists of two parallel simulation protocol implementations: the first one is based on the null message algorithm and additionally records the external events (events received from other LPs) to a trace file; the second one executes the simulation using the trace file to determine which events are safe and which are not.
Note that although we implemented a conservative protocol,
the provided API itself would allow implementing optimistic
protocols as well. The parallel simulation algorithm has
access to the executing simulation model, so it could perform
saving/restoring model state if model objects support this
- [Unfortunately, support for state saving/restoration
needs to be individually and manually added to each class
in the simulation, including user-programmed simple modules.]
We also expect that due to the modularity, extensibility, and clean internal architecture of the parallel simulation subsystem, the OMNeT++ framework has the potential to become the preferred platform for PDES research.
17 Customizing and Extending OMNeT++¶
17.1 Overview¶
OMNeT++ is an open system, and several details of its operation can be customized and extended by writing C++ code. Some extension interfaces have already been covered in other chapters:
- Defining new NED functions was described in Section~[7.12].
- Defining new result filters and recorders was described in Section~[4.15.7].
This chapter will begin by introducing some infrastructure features that are useful for extensions:
- Config options. This facility lets other extension classes define their own configuration options.
- Simulation lifecycle listeners allow extensions to get notified when a network is set up, simulation is started, paused or resumed, the simulation ended successfully or with an error, and so on.
- cEvent lets extensions schedule actions for certain simulation times. This is especially useful for custom event schedulers that we'll cover later in this chapter.
Then we will continue with the descriptions of the following extension interfaces:
- cRNG lets one add new random number generator algorithms.
- cScheduler is an interface for event schedulers. This extension interface allows for implementing real-time, hardware-in-the-loop, distributed and distributed parallel simulation.
- cFutureEventSet. This extension interface allows one to replace the data structure used for storing future events during simulation, i.e. the FES. This may make sense for specialized workloads.
- cFingerprintCalculator. This extension interface allows one to replace or extend the fingerprint computation algorithm.
- cIOutputScalarManager. This extension interface allows one to create additional means of saving scalar results, for example database or CSV output.
- cIOutputVectorManager. This extension interface allows one to create additional means of saving vector results, for example database or CSV output.
- cIEventlogManager. This extension interface allows one to customize event log recording.
- cISnapshotManager. It provides an output stream to which snapshots are written.
- cConfigurationEx. Configuration provider extension. This extension interface lets one replace omnetpp.ini with some other implementation, for example a database.
- User interfaces. When existing runtime user interfaces (Cmdenv, Qtenv) don't suffice, one can create a new one, reusing the infrastructure provided by the common base of the three.
Many extension interfaces follow a common pattern: one needs to implement a given interface class (e.g. cRNG for random number generators), let OMNeT++ know about it by registering the class with the Register_Class() macro, and finally activate it by the appropriate configuration option (e.g. rng-class=MyRNG). The interface classes (cRNG, cScheduler, etc.) are documented in the API Reference.
- NOTE
A common error is that OMNeT++ cannot find the class at runtime. When that happens, make sure the executable actually contains the code of the class. When linking with a library, over-optimizing linkers (especially on Unix) tend to leave out code which seems to be unreferenced by other parts of the program.
The following sections elaborate on the various extension interfaces.
17.2 Adding a New Configuration Option¶
17.2.1 Registration¶
New configuration options need to be declared using one of the appropriate registration macros. These macros are:
Register_GlobalConfigOption(ID, NAME, TYPE, DEFAULTVALUE, DESCRIPTION) Register_PerRunConfigOption(ID, NAME, TYPE, DEFAULTVALUE, DESCRIPTION) Register_GlobalConfigOptionU(ID, NAME, UNIT, DEFAULTVALUE, DESCRIPTION) Register_PerRunConfigOptionU(ID, NAME, UNIT, DEFAULTVALUE, DESCRIPTION) Register_PerObjectConfigOption(ID, NAME, KIND, TYPE, DEFAULTVALUE, DESCRIPTION) Register_PerObjectConfigOptionU(ID, NAME, KIND, UNIT, DEFAULTVALUE, DESCRIPTION)
Configuration options come in three flavors, as indicated by the macro names:
- Global options affect all configurations (i.e., they are only accepted in the [General] section but not in [Config <name>] sections).
- Per-Run options can be specified in any section (i.e., both in [General] and in [Config <name>] sections). They affect the configuration they occur in.
- Per-Object options can be specified in any section (i.e., both in [General] and in [Config <name>] sections). They are specific to an object or group of objects. Their names must always contain a hyphen (-) character so that they can be distinguished from module/channel parameter assignments when they occur in ini files.
The macro arguments are as follows:
- ID is a C++ identifier that becomes the name of a global variable, a pointer to a cConfigOption object that the macro creates. It allows you to refer to the configuration option, e.g., when querying its value using the member functions of cConfiguration.
- NAME is the name of the option (a string).
- KIND applies to per-object configuration options and clarifies what kind of objects the option applies to. Its value must be one of: KIND_COMPONENT (module or channel), KIND_CHANNEL, KIND_MODULE (simple or compound module), KIND_SIMPLE_MODULE, KIND_PARAMETER (module or channel parameter), KIND_STATISTIC (statistic declared in NED via @statistic), KIND_SCALAR (output scalar), KIND_VECTOR (output vector), KIND_UNSPECIFIED_TYPE (only used for the typename option), KIND_OTHER (anything else).
- TYPE is the data type of the config option; it must be one of: CFG_BOOL, CFG_INT, CFG_DOUBLE, CFG_STRING, CFG_FILENAME, CFG_FILENAMES, CFG_PATH, CFG_CUSTOM. The most significant difference between filesystem-related types (filename, filenames, path) and plain strings is that relative filenames and paths are automatically converted to absolute when the configuration is read, with the base directory being the location of the ini file from which the configuration entry was read.
- UNIT is a string that names the measurement unit in which the option's value is to be interpreted; it implies type CFG_DOUBLE.
- DEFAULTVALUE is the default value in textual form (string); this should be nullptr if the option has no default value.
- DESCRIPTION is an arbitrarily long string that describes the purpose and operation of the option. It will be used in help texts, etc.
For example, the debug-on-errors option is declared in the following way:
Register_GlobalConfigOption(CFGID_DEBUG_ON_ERRORS, "debug-on-errors",
CFG_BOOL, "false", "When enabled, runtime errors will cause...");
The macro will register the option and also declare the CFGID_DEBUG_ON_ERRORS variable as a pointer to a cConfigOption. The variable can be used later as a “handle” when reading the option's value from the configuration database.
17.2.2 Reading the Value¶
The configuration is accessible via the getConfig() method of cEnvir. It returns a pointer to the configuration object (cConfiguration):
cConfiguration *config = getEnvir()->getConfig();
cConfiguration provides several methods for querying the configuration.
- NOTE
The configuration object provides a flattened view of the ini file. Sections that inherit from each other are merged. Configuration options provided on the command line in the form --option=value are added first to the object. This ensures that the command line options take precedence over the values specified in the INI file.
const char *getAsCustom(cConfigOption *entry, const char *fallbackValue=nullptr); bool getAsBool(cConfigOption *entry, bool fallbackValue=false); long getAsInt(cConfigOption *entry, long fallbackValue=0); double getAsDouble(cConfigOption *entry, double fallbackValue=0); std::string getAsString(cConfigOption *entry, const char *fallbackValue=""); std::string getAsFilename(cConfigOption *entry); std::vector<std::string> getAsFilenames(cConfigOption *entry); std::string getAsPath(cConfigOption *entry);
The fallbackValue is returned if the value is not specified in the configuration and there is no default value.
bool debug = getEnvir()->getConfig()->getAsBool(CFGID_PARSIM_DEBUG);
17.3 Simulation Lifecycle Listeners¶
cISimulationLifecycleListener is a callback interface for receiving notifications at various stages of simulations: setting up, running, tearing down, etc. Extension classes, such as custom event schedulers, often need this functionality for performing initialization and various other tasks.
Listeners of the type cISimulationLifecycleListener need to be added to cEnvir with its addLifecycleListener() method and removed with removeLifecycleListener().
cISimulationLifecycleListener *listener = ...; getEnvir()->addLifecycleListener(listener); // and finally: getEnvir()->removeLifecycleListener(listener);
To implement a simulation lifecycle listener, subclass from cISimulationLifecycleListener and override its lifecycleEvent() method. It has the following signature:
virtual void lifecycleEvent(SimulationLifecycleEventType eventType, cObject *details) = 0;
Event types include:
- LF_ON_STARTUP
- LF_PRE_NETWORK_SETUP, LF_POST_NETWORK_SETUP
- LF_PRE_NETWORK_INITIALIZE, LF_POST_NETWORK_INITIALIZE
- LF_ON_SIMULATION_START
- LF_ON_SIMULATION_PAUSE, LF_ON_SIMULATION_RESUME
- LF_ON_SIMULATION_SUCCESS, LF_ON_SIMULATION_ERROR
- LF_PRE_NETWORK_FINISH, LF_POST_NETWORK_FINISH
- LF_ON_RUN_END
- LF_PRE_NETWORK_DELETE, LF_POST_NETWORK_DELETE
- LF_ON_SHUTDOWN
The details argument is currently nullptr; future OMNeT++ versions may pass extra information in it. Notifications always refer to the active simulation in case there are more (see cSimulation's getActiveSimulation()).
Simulation lifecycle listeners are mainly intended for use by classes that extend the simulator's functionality, such as custom event schedulers and output vector/scalar managers. The lifecycle of such an extension object is managed by OMNeT++, so one can use their constructor to create and add the listener object to cEnvir, and the destructor to remove and delete it. The code is further simplified if the extension object itself implements cISimulationLifecycleListener:
class CustomScheduler : public cScheduler, public cISimulationLifecycleListener
{
public:
CustomScheduler() { getEnvir()->addLifecycleListener(this); }
~CustomScheduler() { getEnvir()->removeLifecycleListener(this); }
//...
};
17.4 cEvent¶
cEvent represents an event in the discrete event simulator. When events are scheduled, they are inserted into the future events set (FES). During the simulation, events are removed from the FES and executed one by one in timestamp order. The cEvent is executed by invoking its execute() member function. execute() should be overridden in subclasses to carry out the actions associated with the event.
- NOTE
cMessage is also a subclass of cEvent. Its execute() method calls the handleMessage() method of the message's destination module or switches to the coroutine of its activity() method.
execute() has the following signature:
virtual void execute() = 0;
Raw (non-message) event objects are an internal mechanism of the OMNeT++ simulation kernel and should not be used in programming simulation models. However, they can be very useful when implementing custom event schedulers. For example, in co-simulation, events that occur in the other simulator may be represented with a cEvent in OMNeT++. The simulation time limit is also implemented with a custom cEvent.
17.5 Defining a New Random Number Generator¶
This interface allows adding new RNG implementations (see section [7.3]) to OMNeT++. The motivation might be to achieve integration with external software (for example, something like Akaroa) or to replicate exactly the trajectory of a simulation ported from another simulation framework that uses a different RNG.
The new RNG C++ class must implement the cRNG interface and can be activated with the rng-class configuration option.
17.6 Defining a New Event Scheduler¶
This extension interface allows you to replace the event scheduler class with a custom one, which is essential for implementing many features, including cosimulation, real-time simulation, network or device emulation, and distributed simulation.
The role of the event scheduler is to always return the next event to be processed by the simulator. The default implementation returns the first event in the future events list. Other variants include:
- For real-time simulation, this scheduler is replaced with one augmented
with wait calls (e.g. usleep()) that synchronize the
simulation time to the system clock. There are several options for what should
happen if the simulation time has already fallen behind: one may re-adjust the
reference time, leave it unchanged in the hope of catching up later, or stop
with an error message.
- For emulation, the real-time scheduler is augmented with code that
captures packets from real network devices and inserts them into the simulation.
INET Framework, the main protocol simulation package for OMNeT++, contains an
emulation scheduler. It uses the pcap library to capture packets and
raw sockets to send packets to a real network device. Emulation in INET also
involves header serializer classes that convert between protocol
headers and their C++ object representations used within the simulation.
- For parallel simulation (see chapter [16]), the
scheduler is modified to listen for messages arriving from other logical
processes (LPs) and inserts them into the simulation. The scheduler also blocks
the simulation when it is not safe to execute the next event due to a potential
causality violation, until clearance arrives from other LPs to continue in the
form of a null message.
- OMNeT++ supports distributed simulation using HLA (IEEE 1516)
- [The
source code for the HLA and SystemC integration features is not open source, but
they are available to researchers on request free of charge.]
- OMNeT++ also supports mixing SystemC (IEEE 1666-2005) modules with OMNeT++ modules in the simulation. When this feature is enabled, there are two future event lists in the simulation: OMNeT++'s and SystemC's. A special scheduler takes care to consume events from both lists in increasing timestamp order. This method of performing mixed simulations is orders of magnitude faster and also more flexible than letting the two simulators execute in separate processes and communicate over a pipe or socket connection.
The scheduler C++ class must implement the cScheduler interface and can be activated with the scheduler-class configuration option.
Simulation lifetime listeners and the cEvent class can be extremely useful when implementing certain types of event schedulers.
To see examples of scheduler classes, check the cSequentialScheduler and cRealTimeScheduler classes in the simulation kernel, cSocketRTScheduler which is part of the Sockets sample simulation, or cParsimSynchronizer and its subclasses that are part of the parallel simulation support of OMNeT++.
17.7 Defining a New FES Data Structure¶
This extension interface allows one to replace the data structure used for storing future events during simulation, i.e., the FES. Replacing the FES may be suitable for specialized workloads or for the purpose of performance comparison of various FES algorithms. (The default, binary heap-based FES implementation is a good choice for general workloads.)
The FES C++ class must implement the cFutureEventSet interface and can be activated with the futureeventset-class configuration option.
17.8 Defining a New Fingerprint Algorithm¶
This extension interface allows one to replace or extend the fingerprint computational algorithm (see section [15.4]).
The computational class for fingerprint must implement the cFingerprintCalculator interface, and can be activated with the fingerprintcalculator-class configuration option.
17.9 Defining a New Output Scalar Manager¶
An output scalar manager handles the recording of scalar and histogram output data. The default output scalar manager is cFileOutputScalarManager, which saves data into .sca files. This extension interface allows one to create additional means of saving scalar and histogram results, such as database or CSV output.
The new class must implement cIOutputScalarManager and can be activated with the outputscalarmanager-class configuration option.
17.10 Defining a New Output Vector Manager¶
An output vector manager handles the recording of output vectors produced by objects such as cOutVector. The default output vector manager is cIndexedFileOutputVectorManager, which saves data into .vec files indexed in separate .vci files. This extension interface allows one to create additional means of saving vector results, such as database or CSV output.
The new class must implement the cIOutputVectorManager interface and can be activated with the outputvectormanager-class configuration option.
17.11 Defining a New Eventlog Manager¶
An eventlog manager handles the recording of simulation history into an event log (see [13]). The default eventlog manager is EventlogFileManager, which records into a file and also allows for some filtering. By replacing the default eventlog manager class, one can introduce additional filtering, record into a different file format, or store it in different storage (e.g., a database or a remote visualizer).
The new class must implement the cIEventlogManager interface and can be activated with the eventlogmanager-class configuration option.
17.12 Defining a New Snapshot Manager¶
A snapshot manager provides an output stream to which snapshots are written (see Section [7.11.6]). The default snapshot manager is cFileSnapshotManager.
The new class must implement the cISnapshotManager interface and can be activated with the snapshotmanager-class configuration option.
17.13 Defining a New Configuration Provider¶
17.13.1 Overview¶
The configuration provider extension allows one to replace ini files with some other storage implementation, such as a database. The configuration provider C++ class must implement the cConfigurationEx interface and can be activated using the configuration-class configuration option.
The cConfigurationEx interface abstracts the inifile-based data model to some extent. It assumes that the configuration data consists of several named configurations. Before every simulation run, one of the named configurations is activated, and from then on, all queries into the configuration operate on the active named configuration only.
In practice, you will probably use the SectionBasedConfiguration class (in src/envir) or subclass it because it already implements a lot of functionality that you would otherwise have to implement.
SectionBasedConfiguration does not assume ini files or any other specific storage format. Instead, it accepts an object that implements the cConfigurationReader interface to provide the data in its raw form. The default implementation of cConfigurationReader is InifileReader.
17.13.2 The Startup Sequence¶
From the perspective of the configuration extension, the startup sequence looks as follows (see src/envir/startup.cc in the source code):
- First, ini files specified on the command line are read into a boot-time configuration object. The boot-time configuration is always a SectionBasedConfiguration with InifileReader.
- Shared libraries are loaded (see the -l command-line option and the load-libs configuration option). This allows configuration classes to come from shared libraries.
- The configuration-class configuration option is examined. If it is present, a configuration object of the given class is instantiated and replaces the boot-time configuration. The new configuration object is initialized from the boot-time configuration, allowing it to read parameters (e.g., database connection parameters, XML file name, etc.) from it. Then the boot-time configuration object is deallocated.
- The load-libs option from the new configuration object is processed.
- Then everything proceeds as normal, using the new configuration object.
17.13.3 Providing a Custom Configuration Class¶
To replace the configuration object with a custom implementation, one needs to subclass cConfigurationEx, register the new class:
#include "cconfiguration.h"
class CustomConfiguration : public cConfigurationEx
{
...
};
Register_Class(CustomConfiguration);
and then activate it in the boot-time configuration:
[General] configuration-class = CustomConfiguration
17.13.4 Providing a Custom Reader for SectionBasedConfiguration¶
As mentioned earlier, writing a configuration class from scratch can be a lot of work, and it may be more practical to reuse SectionBasedConfiguration with a different configuration reader class. This can be done using the sectionbasedconfig-configreader-class configuration option, which is interpreted by SectionBasedConfiguration. Specify the following in the boot-time ini file:
[General] configuration-class = SectionBasedConfiguration sectionbasedconfig-configreader-class = <new-reader-class>
The configuration reader class should look like this:
#include "cconfigreader.h"
class DatabaseConfigurationReader : public cConfigurationReader
{
...
};
Register_Class(DatabaseConfigurationReader);
17.14 Implementing a New User Interface¶
It is possible to extend OMNeT++ with a new user interface. The new user interface will have the same privileges as Cmdenv and Qtenv. This means that it can be activated by starting the simulation executable with the -u <name> command-line or the user-interface configuration option. It can also be set as the default user interface and define new command-line options and configuration options.
User interfaces must implement (i.e. subclass from) cRunnableEnvir and must be registered to OMNeT++ with the Register_OmnetApp() macro. In most cases, you will want to subclass EnvirBase instead of cRunnableEnvir because EnvirBase already implements many functionalities that you would otherwise have to implement.
- NOTE
If you want something completely different from what EnvirBase provides, such as embedding the simulation kernel into another application, then you should refer to section [18.2], not this one.
An example user interface:
#include "envirbase.h"
class FooEnv : public EnvirBase
{
...
};
Register_OmnetApp("FooEnv", FooEnv, 30, "an experimental user interface");
The envirbase.h header comes from the src/envir directory, so it is necessary to add it to the include path (-I).
The arguments to Register_OmnetApp() include the user interface name (to be used with the -u and user-interface options), the C++ class that implements it, a weight for default user interface selection (if -u is missing, the user interface with the highest weight will be activated), and a description string (for help and other purposes).
The C++ class should implement all methods left as pure virtual in EnvirBase, and possibly other methods if you want to customize their behavior. One method that you will certainly want to re-implement is run(), as this is where your user interface will be executed. Once this method exits, the simulation program will also exit.
- NOTE
A good starting point for implementing your own user interface is Cmdenv. You can simply copy and modify its source code to quickly get started.
18 Embedding the Simulation Kernel¶
18.1 Architecture¶
OMNeT++ has a modular architecture. The following diagram illustrates the high-level architecture of OMNeT++ simulations:

The blocks represent the following components:
- Sim is the simulation kernel and class library. Sim is a library linked to simulation programs.
- Envir is another library that contains all code that is common to all the user interfaces. main() also resides in the Envir library. Envir presents itself towards Sim and the executing model as an instance of the cEnvir facade class. Some aspects of the Envir library like result recording can be customized using plugin interfaces. Embedding OMNeT++ into applications usually involves writing a custom cEnvir subclass (see sections [17.14] and [18.2].)
- Cmdenv, Qtenv are Envir-based libraries that contain specific user interface implementations. A simulation program is linked with one or more of them; in the latter case, one of the UI libraries is chosen and instantiated either explicitly or automatically when the program starts.
- The Model Component Library includes simple module definitions and their C++ implementations, compound module types, channels, networks, message types, and everything belonging to models that have been linked to the simulation program. A simulation program can run any model that contains all of the required linked components.
- The Executing Model is the model that is set up for simulation. This model contains objects (modules, channels, and so on) that are all instances of the components in the model component library.
The arrows in the figure describe how components interact with each other:
- Executing Model <==> Sim. The simulation kernel manages the future events and activates modules in the executing model as events occur. The modules of the executing model are stored in an instance of the class cSimulation. In turn, the executing model calls functions in the simulation kernel and uses classes in the Sim library.
- Sim <==> Model Component Library. The simulation kernel instantiates simple modules and other components when the simulation model is set up at the beginning of the simulation run. In addition, it refers to the component library when dynamic module creation is used. The mechanisms for registering and looking up components in the model component library are implemented as part of Sim.
- Executing Model <==> Envir. The Envir presents itself as a facade object towards the executing model. Model code directly accesses Envir e.g. for logging (EV<<).
- Sim <==> Envir. Envir is in full command of what happens in the simulation program. Envir contains the main() function where execution begins. Envir determines which models should be set up for simulation, and instructs Sim to do so. Envir contains the main simulation loop (determine-next-event, execute-event sequence) and invokes the simulation kernel for the necessary functionality (event scheduling and event execution are implemented in Sim). Envir catches and handles errors and exceptions that occur in the simulation kernel or in the library classes during execution. Envir presents a single facade object toward Sim -- no Envir internals are visible to Sim or the executing model. During simulation model setup, Envir supplies module parameter values for Sim when Sim asks for them. Sim writes output vectors via Envir, so one can redefine the output vector storing mechanism by changing Envir. Sim and its classes use Envir to print debug information.
- Envir <==> Cmdenv/Qtenv. Cmdenv, and Qtenv are concrete user interface implementations. When a simulation program is started, the main() function (which is part of Envir) determines the appropriate user interface class, creates an instance and runs it. Sim's or the model's calls on Envir are delegated to the user interface.
18.2 Embedding the OMNeT++ Simulation Kernel¶
This section discusses the issues of embedding the simulation kernel or a simulation model into a larger application. We assume that you do not just want to change one or two aspects of the simulator (such as event scheduling or result recording) or create a new user interface similar to Cmdenv or Qtenv -- if so, see chapter [17].
For the following section, we assume that you will write the embedding program from scratch, that is, starting from a main() function.
18.2.1 The main() Function¶
The minimalistic program described below initializes the simulation library and runs two simulations. In later sections, we will review the details of the code and discuss how to improve it.
#include <omnetpp.h>
using namespace omnetpp;
int main(int argc, char *argv[])
{
// the following line MUST be at the top of main()
cStaticFlag dummy;
// initializations
CodeFragments::executeAll(CodeFragments::STARTUP);
SimTime::setScaleExp(-12);
// load NED files
cSimulation::loadNedSourceFolder("./foodir");
cSimulation::loadNedSourceFolder("./bardir");
cSimulation::doneLoadingNedFiles();
// run two simulations
simulate("FooNetwork", 1000);
simulate("BarNetwork", 2000);
// deallocate registration lists, loaded NED files, etc.
CodeFragment::executeAll(CodeFragment::SHUTDOWN);
return 0;
}
The first few lines of the code initialize the simulation library. The purpose of cStaticFlag is to set a global variable to true for the duration of the main() function to help the simulation library handle exceptions correctly in extreme cases. CodeFragment::executeAll(CodeFragment::STARTUP) performs various startup tasks, such as building registration tables out of the Define_Module(), Register_Class(), and similar entries throughout the code. SimTime::setScaleExp(-12) sets the simulation time resolution to picoseconds; other values can be used as well, but it is mandatory to choose one.
- NOTE
The simulation time exponent cannot be changed at a later stage since it is a global variable, and the values of the existing simtime_t instances would change.
The code then loads the NED files from the foodir and bardir subdirectories of the working directory (as if the NED path was ./foodir;./bardir), and runs two simulations.
18.2.2 The simulate() Function¶
A minimalistic version of the simulate() function is shown below. To shorten the code, the exception handling code has been omitted (try/catch blocks) apart from the event loop. However, every line is marked with “E!” where various problems with the simulation model can occur and can be thrown as exceptions.
void simulate(const char *networkName, simtime_t limit)
{
// look up network type
cModuleType *networkType = cModuleType::find(networkName);
if (networkType == nullptr) {
printf("No such network: %s\n", networkName);
return;
}
// create a simulation manager and an environment for the simulation
cEnvir *env = new CustomSimulationEnv(argc, argv, new EmptyConfig());
cSimulation *sim = new cSimulation("simulation", env);
cSimulation::setActiveSimulation(sim);
// set up network and prepare for running it
sim->setupNetwork(networkType); //E!
sim->setSimulationTimeLimit(limit);
// prepare for running it
sim->callInitialize();
// run the simulation
bool ok = true;
try {
while (true) {
cEvent *event = sim->takeNextEvent();
if (!event)
break;
sim->executeEvent(event);
}
}
catch (cTerminationException& e) {
printf("Finished: %s\n", e.what());
}
catch (std::exception& e) {
ok = false;
printf("ERROR: %s\n", e.what());
}
if (ok)
sim->callFinish(); //E!
sim->deleteNetwork(); //E!
cSimulation::setActiveSimulation(nullptr);
delete sim; // deletes env as well
}
The function accepts a network type name (which must be fully qualified with a package name) and a simulation time limit.
In the first few lines, the code looks up the network among the available module types and prints an error message if it is not found.
Then it proceeds to create and activate a simulation manager object (cSimulation). The simulation manager requires another object, called the environment object. The environment object is used by the simulation manager to read the configuration. In addition, the simulation results are also written via the environment object.
The environment object (CustomSimulationEnv in the above code) must be provided by the programmer; this is described in detail in a later section.
- NOTE
In versions 4.x and earlier, the simulation manager and the environment object could be accessed as simulation and ev (which were global variables in 3.x and macros in 4.x). In 5.x they can be accessed with the getSimulation() and getEnvir() functions, which are basically aliases to cSimulation::getActiveSimulation() and cSimulation::getActiveSimulation()->getEnvir().
The network is then set up in the simulation manager. The sim->setupNetwork() method creates the system module and recursively all modules and their interconnections; module parameters are also read from the configuration (where required) and assigned. If there is an error (for example, module type not found), an exception will be thrown. The exception object is some kind of std::exception, usually a cRuntimeError.
If the network setup is successful, sim->callInitialize() is invoked next to run the initialization code of modules and channels in the network. An exception is thrown if something goes wrong in any of the initialize() methods.
The next lines run the simulation by calling sim->takeNextEvent() and sim->executeEvent() in a loop. The loop is exited when an exception occurs. The exception may indicate a runtime error or a normal termination condition such as when there are no more events or the simulation time limit has been reached. (The latter are represented by cTerminationException.)
If the simulation has completed successfully (ok == true), the code goes on to call the finish() methods of modules and channels. Then, regardless of whether there was an error, cleanup takes place by calling sim->deleteNetwork().
Finally, the simulation manager object is deallocated, but the active simulation manager is not allowed to be deleted; therefore, it is deactivated using setActiveSimulation(nullptr).
18.2.3 Providing an Environment Object¶
The environment object needs to be subclassed from the cEnvir class, but since it has many pure virtual methods, it is easier to begin by subclassing cNullEnvir. cNullEnvir defines all pure virtual methods with either an empty body or with a body that throws an "unsupported method called" exception. You can redefine methods to be more sophisticated later on as you progress with the development.
You must redefine the readParameter() method. This enables module parameters to obtain their values. For debugging purposes, you can also redefine sputn() where module log messages are written to. cNullEnvir only provides one random number generator, so if your simulation model uses more than one, you also need to redefine the getNumRNGs() and getRNG(k) methods. To print or store simulation records, redefine recordScalar(), recordStatistic(), and/or the output vector related methods. Other cEnvir methods are invoked from the simulation kernel to inform the environment about messages being sent, events scheduled and cancelled, modules created, and so on.
The following example shows a minimalistic environment class that is enough to get started:
class CustomSimulationEnv : public cNullEnvir
{
public:
// constructor
CustomSimulationEnv(int ac, char **av, cConfiguration *c) :
cNullEnvir(ac, av, c) {}
// model parameters: accept defaults
virtual void readParameter(cPar *par) {
if (par->containsValue())
par->acceptDefault();
else
throw cRuntimeError("no value for %s", par->getFullPath().c_str());
}
// send module log messages to stdout
virtual void sputn(const char *s, int n) {
(void) ::fwrite(s,1,n,stdout);
}
};
18.2.4 Providing a Configuration Object¶
The configuration object needs to subclass from cConfiguration. cConfiguration also has several methods, but the typed ones (getAsBool(), getAsInt(), etc.) have default implementations that delegate to the much fewer string-based methods (getConfigValue(), etc.).
It is fairly straightforward to implement a configuration class that emulates an empty ini file:
class EmptyConfig : public cConfiguration
{
protected:
class NullKeyValue : public KeyValue {
public:
virtual const char *getKey() const {return nullptr;}
virtual const char *getValue() const {return nullptr;}
virtual const char *getBaseDirectory() const {return nullptr;}
};
NullKeyValue nullKeyValue;
protected:
virtual const char *substituteVariables(const char *value) {return value;}
public:
virtual const char *getConfigValue(const char *key) const
{return nullptr;}
virtual const KeyValue& getConfigEntry(const char *key) const
{return nullKeyValue;}
virtual const char *getPerObjectConfigValue(const char *objectFullPath,
const char *keySuffix) const {return nullptr;}
virtual const KeyValue& getPerObjectConfigEntry(const char *objectFullPath,
const char *keySuffix) const {return nullKeyValue;}
};
18.2.5 Loading NED Files¶
NED files can be loaded with any of the following static methods of cSimulation: loadNedSourceFolder(), loadNedFile(), and loadNedText(). The first method loads an entire subdirectory tree, the second method loads a single NED file, and the third method takes a literal string containing NED code and parses it.
- NOTE
One use of loadNedText() is to parse NED sources previously converted to C++ string constants and linked into the executable. This enables creating executables that are self-contained and do not require NED files to be distributed with them.
The above functions can also be mixed, but after the last call, doneLoadingNedFiles() must be invoked (it checks for unresolved NED types).
Loading NED files has a global effect; therefore, they cannot be unloaded.
18.2.6 How to Eliminate NED Files¶
It is possible to get rid of NED files altogether. This would also remove the dependency on the oppnedxml library and the code in sim/netbuilder, although at the cost of additional coding.
- NOTE
When the only purpose is to get rid of NED files as an external dependency of the program, it is simpler to use loadNedText() on NED files converted to C++ string constants instead.
The trick is to write cModuleType and cChannelType objects for simple module, compound module, and channel types and register them manually. For example, cModuleType has pure virtual methods called createModuleObject(), addParametersAndGatesTo(module), setupGateVectors(module), buildInside(module), which you need to implement. The body of the buildInside() method would be similar to C++ files generated by nedtool of OMNeT++ 3.x.
18.2.7 Assigning Module Parameters¶
As mentioned earlier, modules obtain values for their input parameters by calling the readParameter() method of the environment object (cEnvir).
- NOTE
readParameter() is only called for parameters that have not been set to a fixed (i.e., non-default) value in the NED files.
The readParameter() method should be written in a manner that enables it to assign the parameter. When doing so, it can recognize the parameter from its name (par->getName()), from its full path (par->getFullPath()), from the owner module's class (par->getOwner()->getClassName()) or NED type name (((cComponent *)par->getOwner())->getNedTypeName()). Then it can set the parameter using one of the typed setter methods (setBoolValue(), setLongValue(), etc.), or set it to an expression provided in string form (parse() method). It can also accept the default value if it exists (acceptDefault()).
The following code is a straightforward example that answers parameter value requests from a pre-filled table.
class CustomSimulationEnv : public cNullEnvir
{
protected:
// parameter (fullpath,value) pairs, needs to be pre-filled
std::map<std::string,std::string> paramValues;
public:
...
virtual void readParameter(cPar *par) {
if (paramValues.find(par->getFullPath()) != paramValues.end())
par->parse(paramValues[par->getFullPath()]);
else if (par->containsValue())
par->acceptDefault();
else
throw cRuntimeError("no value for %s", par->getFullPath().c_str());
}
};
18.2.8 Extracting Statistics from the Model¶
There are several ways you can extract statistics from the simulation.
18.2.8.1 C++ Calls into the Model¶
Modules in the simulation are C++ objects. If you add the appropriate public getter methods to the module classes, you can call them from the main program to obtain statistics. Modules may be looked up with the getModuleByPath() method of cSimulation, then cast to the specific module type via check_and_cast<>() so that the getter methods can be invoked.
cModule *mod = getSimulation()->getModuleByPath("Network.client[2].app");
WebApp *appMod = check_and_cast<WebApp *>(mod);
int numRequestsSent = appMod->getNumRequestsSent();
double avgReplyTime = appMod->getAvgReplyTime();
...
The drawback of this approach is that getters need to be added manually to all affected module classes, which might not be practical, especially if modules come from external projects.
18.2.8.2 cEnvir Callbacks¶
A more general way is to catch recordScalar() method calls in the simulation model. The cModule's recordScalar() method delegates to the similar function in cEnvir. You may define the latter function so that it stores all recorded scalars (for example, in an std::map), where the main program can find them later. Values from output vectors can be captured in a similar manner.
An example implementation:
class CustomSimulationEnv : public cNullEnvir
{
private:
std::map<std::string, double> results;
public:
virtual void recordScalar(cComponent *component, const char *name,
double value, opp_string_map *attributes=nullptr)
{
results[component->getFullPath() + "." + name] = value;
}
const std::map<std::string, double>& getResults() {return results;}
};
...
const std::map<std::string, double>& results = env->getResults();
int numRequestsSent = results["Network.client[2].app.numRequestsSent"];
double avgReplyTime = results["Network.client[2].app.avgReplyTime"];
A drawback of this approach is that compile-time checking of statistics names is lost, but the advantages are that any simulation model can now be used without changes, and that capturing additional statistics does not require code modification in the main program.
18.2.9 The Simulation Loop¶
To run the simulation, the takeNextEvent() and executeEvent() methods of cSimulation must be called in a loop:
cSimulation *sim = getSimulation();
while (sim->getSimTime() < limit) {
cEvent *event = sim->takeNextEvent();
sim->executeEvent(event);
}
Depending on the concrete scheduler class, the takeNextEvent() may return nullptr in certain cases. The default cSequentialScheduler never returns nullptr.
The execution may terminate in various ways. Runtime errors cause a cRuntimeError (or another kind of std::exception) to be thrown. cTerminationException is thrown on normal termination conditions, such as when the simulation runs out of events to process.
You may customize the loop to exit on other termination conditions as well, such as on a simulation time limit (see above), on a CPU time limit, or when results reach a required accuracy. It is relatively straightforward to build in progress reporting and interactivity (start/stop).
Animation can be hooked up to the appropriate callback methods of cEnvir: beginSend(), sendHop(), endSend(), and others.
18.2.10 Multiple, Coexisting Simulations¶
It is possible for several instances of cSimulation to coexist, and also to set up and simulate a network in each instance. However, this requires frequent use of cSimulation::setActiveSimulation(). Before invoking any cSimulation method or module method, the corresponding cSimulation instance needs to be designated as the active simulation manager.
Every cSimulation instance should have its own associated environment object (cEnvir). Environment objects may not be shared among several cSimulation instances. The cSimulation's destructor also removes the associated cEnvir instance.
cSimulation instances may be reused from one simulation to another, but it is also possible to create a new instance for each simulation run.
- NOTE
It is not possible to run different simulations concurrently from different threads due to the use of global variables which are not easy to eliminate, such as the active simulation manager pointer and the active environment object pointer. Static buffers and objects (like string pools) are also used for efficiency reasons in some places inside the simulation kernel.
18.2.11 Installing a Custom Scheduler¶
The default event scheduler is cSequentialScheduler. To replace it with a different scheduler (e.g., cRealTimeScheduler or your own scheduler class), add a setScheduler() call into main():
cScheduler *scheduler = new CustomScheduler(); getSimulation()->setScheduler(scheduler);
It is usually not a good idea to change schedulers in the middle of a simulation; therefore, setScheduler() may only be called when no network is set up.
18.2.12 Multi-Threaded Programs¶
The OMNeT++ simulation kernel is not reentrant; therefore, it must be protected against concurrent access.
19 Appendix A: NED Reference¶
19.1 Syntax¶
19.1.1 NED File Name Extension¶
NED files have the .ned file name suffix. This is mandatory, and cannot be overridden.
19.1.2 NED File Encoding¶
NED files are ASCII, but non-ASCII characters are permitted in comments and string literals. This allows for using encodings that are a superset of ASCII, for example ISO 8859-1 and UTF-8.
- NOTE
There is no standard way to specify or determine the encoding of a NED file. It is up to the user to configure the desired encoding in text editors and other tools that edit or process NED files.
String literals (e.g. in parameter values) will be passed to the C++ code as const char * without any conversion; it is up to the simulation model to interpret them using the desired encoding.
Line ending may be either CR or CRLF, regardless of the platform.
19.1.3 Reserved Words¶
The following words are reserved and cannot be used for identifiers:
allowunconnected bool channel channelinterface connections const default double extends false for gates if import index inf inout input int like module moduleinterface nan network null nullptr object output package parameters parent property simple sizeof string submodules this true typename types undefined volatile xml xmldoc
19.1.4 Identifiers¶
Identifiers must be composed of letters of the English alphabet (a-z, A-Z), numbers (0-9), and underscore “_”. Identifiers may only begin with a letter or underscore.
The recommended way to compose identifiers from multiple words is to capitalize the beginning of each word (camel case).
19.1.5 Case Sensitivity¶
Keywords and identifiers in the NED language are case sensitive. For example, TCP and Tcp are two different names.
19.1.6 Literals¶
19.1.6.1 String Literals¶
String literals use double quotes. The following C-style backslash escapes are recognized: \b, \f, \n, \r, \t, \\, \", and \xhh where h is a hexadecimal digit.
19.1.6.2 Numeric Constants¶
Numeric constants are accepted in the usual decimal, hexadecimal (0x prefix), and scientific notations. Octal numbers are not accepted (numbers that start with the 0 digit are interpreted as decimal).
nan, inf, and -inf mean the floating-point not-a-number, positive infinity, and negative infinity values, respectively.
19.1.6.3 Quantity Constants¶
A quantity constant has the form (<numeric-constant> <unit>)+, for example 12.5mW or 3h 15min 37.2s. Whitespace is optional in front of a unit but must be present after a unit if it is followed by a number.
When multiple measurement units are present, they have to be convertible into each other (i.e., refer to the same physical quantity).
Section [19.5.11] lists the units recognized by OMNeT++. Other units can be used as well; the only downside being that OMNeT++ will not be able to perform conversions on them.
19.1.6.4 Null Object References¶
The keywords null and nullptr are synonymous and denote an object reference that doesn't refer to any valid object.
19.1.6.5 Undefined¶
The keyword undefined denotes the “missing value” value, similar to (void)0 in C/C++. undefined has its own type and cannot be cast to any other type.
19.1.7 Comments¶
Comments can be placed at the end of lines. Comments begin with a double slash // and continue until the end of the line.
19.1.8 Grammar¶
The grammar of the NED language can be found in Appendix [20].
19.2 Built-in Definitions¶
The NED language has the following built-in definitions, all in the ned package: channels IdealChannel, DelayChannel, and DatarateChannel; module interfaces IBidirectionalChannel and IUnidirectionalChannel. The latter two are reserved for future use.
The bodies of @statistic properties have been omitted for brevity from the following listing.
- NOTE
One can print the full definitions by running opp_run -h neddecls.
package ned;
@namespace("omnetpp");
channel IdealChannel
{
@class(cIdealChannel);
}
channel DelayChannel
{
@class(cDelayChannel);
@signal[messageSent](type=omnetpp::cMessage);
@signal[messageDiscarded](type=omnetpp::cMessage);
@statistic[messages](source="constant1(messageSent)";record=count?;interpolationmode=none);
@statistic[messagesDiscarded](source="constant1(messageDiscarded)";record=count?;interpolationmode=none);
bool disabled @mutable = default(false);
double delay @mutable = default(0s) @unit(s); // propagation delay
}
channel DatarateChannel
{
@class(cDatarateChannel);
@signal[channelBusy](type=long);
@signal[messageSent](type=omnetpp::cMessage);
@signal[messageDiscarded](type=omnetpp::cMessage);
@statistic[busy](source=channelBusy;record=vector?;interpolationmode=sample-hold);
@statistic[utilization](source="timeavg(channelBusy)";record=last?);
@statistic[packets](source="constant1(messageSent)";record=count?;interpolationmode=none);
@statistic[packetBytes](source="packetBytes(messageSent)";record=sum?;unit=B;interpolationmode=none);
@statistic[packetsDiscarded](source="constant1(messageDiscarded)";record=count?;interpolationmode=none);
@statistic[throughput](source="sumPerDuration(packetBits(messageSent))";record=last?;unit=bps);
bool disabled @mutable = default(false);
double delay @mutable = default(0s) @unit(s); // propagation delay
double datarate @mutable = default(0bps) @unit(bps); // bits per second; 0=infinite
double ber @mutable = default(0); // bit error rate (BER)
double per @mutable = default(0); // packet error rate (PER)
}
moduleinterface IBidirectionalChannel
{
gates:
inout a;
inout b;
}
moduleinterface IUnidirectionalChannel
{
gates:
input i;
output o;
}
19.3 Packages¶
NED supports hierarchical namespaces called packages. The model is similar to Java packages, with minor changes.
19.3.1 Package Declaration¶
A NED file may contain a package declaration. The package declaration uses the package keyword and specifies the package for the definitions in the NED file. If there is no package declaration, the file's contents are in the default package.
Component type names must be unique within their package.
19.3.2 Directory Structure, package.ned¶
Like in Java, the directory of a NED file must match the package declaration. However, it is possible to omit directories at the top which do not contain any NED files (like the typical /org/<projectname> directories in Java).
The top of a directory tree containing NED files is named a NED source folder.
- NOTE
The OMNeT++ runtime recognizes a NEDPATH environment variable, which contains a list of NED source folders and is similar to the Java CLASSPATH variable. NEDPATH also has a command-line option equivalent.
The package.ned file at the top level of a NED source folder plays a special role.
If there is no toplevel package.ned or it contains no package declaration, the declared package of a NED file in the folder <srcfolder>/x/y/z must be x.y.z. If there is a toplevel package.ned and it declares the package as a.b, then any NED file in the folder <srcfolder>/x/y/z must have the declared package a.b.x.y.z.
- NOTE
package.ned files are allowed in other folders as well. They may contain properties and/or documentation for their package, but cannot be used to define the package they are in.
19.4 Components¶
Simple modules, compound modules, networks, channels, module interfaces and channel interfaces are called components.
19.4.1 Simple Modules¶
Simple module types are declared using the simple keyword; see the NED Grammar (Appendix [20]) for the syntax.
Simple modules may have properties ([19.4.8]), parameters ([19.4.9]), and gates ([19.4.11]).
A simple module type may not have inner types ([19.4.15]).
A simple module type may extend another simple module type, and may implement one or more module interfaces ([19.4.5]). Inheritance rules are described in section [19.4.21], and interface implementation rules in section [19.4.20].
Every simple module type has an associated C++ class, which must be a subclass of cSimpleModule. The way of associating the NED type with the C++ class is described in section [19.4.7].
19.4.2 Compound Modules¶
Compound module types are declared using the module keyword; see the NED Grammar (Appendix [20]) for the syntax.
A compound module may have properties ([19.4.8]), parameters ([19.4.9]), and gates ([19.4.11]); its internal structure is defined by its submodules ([19.4.12]) and connections ([19.4.13]); and it may also have inner types ([19.4.15]) that can be used for its submodules and connections.
A compound module type may extend another compound module type, and may implement one or more module interfaces ([19.4.5]). Inheritance rules are described in section [19.4.21], and interface implementation rules in section [19.4.20].
19.4.3 Networks¶
19.4.3.1 The network Keyword¶
A network declared with the network keyword is equivalent to a compound module (module keyword) with the @isNetwork(true) property.
- NOTE
A simple module can only be designated as a network by specifying the @isNetwork property; the network keyword may not be used for that purpose.
19.4.3.2 The @isNetwork Property¶
The @isNetwork property is only recognized for simple modules and compound modules. The value may be empty, true, or false:
@isNetwork; @isNetwork(); @isNetwork(true); @isNetwork(false);
The empty value corresponds to @isNetwork(true).
The @isNetwork property is not inherited; that is, a subclass of a module with @isNetwork set does not automatically become a network. The @isNetwork property needs to be explicitly added to the subclass to make it a network.
- Rationale
Subclassing may introduce changes to a module that make it unfit to be used as a network.
19.4.4 Channels¶
Channel types are declared using the channel keyword; see the NED Grammar (Appendix [20]) for the syntax.
Channel types may have properties ([19.4.8]) and parameters ([19.4.9]).
A channel type may not have inner types ([19.4.15]).
A channel type may extend another channel type, and may implement one or more channel interfaces ([19.4.6]). Inheritance rules are described in section [19.4.21], and interface implementation rules in section [19.4.20].
Every channel type has an associated C++ class, which must be a subclass of cChannel. The way of associating the NED type with the C++ class is described in section [19.4.7].
The @defaultname property of a channel type determines the default name of the channel object when used in a connection.
19.4.5 Module Interfaces¶
Module interface types are declared using the moduleinterface keyword; see the NED Grammar (Appendix [20]) for the syntax.
Module interfaces may have properties ([19.4.8]), parameters ([19.4.9]), and gates ([19.4.11]). However, parameters are not allowed to have a value assigned, not even a default value.
A module interface type may not have inner types ([19.4.15]).
A module interface type may extend one or more other module interface types. Inheritance rules are described in section [19.4.21].
19.4.6 Channel Interfaces¶
Channel interface types are declared using the channelinterface keyword; see the NED Grammar (Appendix [20]) for the syntax.
Channel interfaces may have properties ([19.4.8]) and parameters ([19.4.9]). However, parameters are not allowed to have a value assigned, not even a default value.
A channel interface type may not have inner types ([19.4.15]).
A channel interface type may extend one or more other channel interface types. Inheritance rules are described in section [19.4.21].
19.4.7 Resolving the C++ Implementation Class¶
The procedure for determining the C++ implementation class for simple modules and channels, collectively referred to as components), is identical. It is as follows:
If the component extends another component and has no @class property, the C++ implementation class is inherited from the base type.
If the component contains a @class property, the C++ class name will be composed of the current namespace (see below) and the value of the @class property. The @class property should contain a single value.
- NOTE
The @class property itself may contain a namespace declaration (i.e. may contain “::”).
If the component contains no @class property and has no base class, the C++ class name will be composed of the current namespace and the unqualified name of the component.
- IMPORTANT
Subclassing in NED does not imply subclassing the C++ implementation. If one intends to subclass a simple module or channel in NED as well as in C++, the @class property needs to be explicitly specified in the derived type, otherwise it will continue to use the C++ class from its super type.
Compound modules will be instantiated with the built-in cModule class, unless the module contains the @class property. When @class is present, the resolution rules are the same as with simple modules.
19.4.7.1 Current Namespace¶
The current namespace is the value of the first @namespace property found while searching in the following order:
- the current NED file
- the package.ned file in the current package or the first ancestor package searching upwards
- NOTE
Note that namespaces coming from multiple @namespace properties in different scopes do not nest; rather, the nearest one wins.
The @namespace property should contain a single value.
19.4.8 Properties¶
Properties are a means of adding metadata annotations to NED files, component types, parameters, gates, submodules, and connections.
19.4.8.1 Identifying a Property¶
Properties are identified by name. It is possible to have several properties on the same object with the same name, as long as they have unique indices. An index is an identifier in square brackets after the property name.
The following example shows a property without an index, one with the index index1, and a third with the index index2.
@prop(); @prop[index1](); @prop[index2]();
19.4.8.2 Property Value¶
The value of the property is specified inside parentheses. The property value consists of key=valuelist pairs, separated by semicolons; valuelist elements are separated with commas. Example:
@prop(key1=value11,value12,value13;key2=value21,value22)
Keys must be unique.
If the key+equal sign part (key=) is missing, the valuelist belongs to the default key. Examples:
@prop1(value1,value2) @prop2(value1,value2;key1=value11,value12,value13)
Most properties use the default key with one value. Examples:
@namespace(inet); @class(Foo); @unit(s);
Property values have a liberal syntax (see Appendix [20]). Values that do not fit the grammar (notably, those containing a comma or a semicolon) need to be surrounded with double quotes.
When interpreting a property value, one layer of quotes is removed automatically, that is, foo and "foo" are the same. Within quotes, escaping works in the same way as within string literals (see [19.1.6]).
Example:
@prop(marks=the ! mark, "the , mark", "the ; mark", other marks); // 4 items
19.4.8.3 Placement¶
Properties may be added to NED files, component types, parameters, gates, submodules, and connections. For the exact syntax, see Appendix [20].
When a component type extends another component type(s), properties are merged. This is described in section [19.4.21].
19.4.8.4 Property Declarations¶
The property keyword is reserved for future use. It is envisioned that accepted property names and property keys would need to be pre-declared, so that the NED infrastructure can warn the user about mistyped or unrecognized names.
19.4.9 Parameters¶
Parameters can be defined and assigned in the parameters section of component types. In addition, parameters can also be assigned in the parameters sections of submodule bodies and connection bodies, but those places do not allow adding new parameters.
The parameters keyword is optional and can be omitted without changing the meaning.
The parameters section may also hold pattern assignments ([19.4.10]) and properties ([19.4.8]).
A parameter is identified by a name and has a data type. A parameter may have a value or default value and may also have properties (see [19.4.8]).
Accepted parameter data types are double, int, string, bool, xml, and object. Any of the above types can be declared volatile as well (volatile int, volatile string, etc.)
The presence of a data type keyword determines whether the given line defines a new parameter or refers to an existing parameter. One can assign a value or default value to an existing parameter, and/or modify its properties or add new properties.
Examples:
int a; // defines new parameter int b @foo; // new parameter with property int c = default(5); // new parameter with default value int d = 5; // new parameter with value assigned int e @foo = 5; // new parameter with property and value f = 10; // assignment to existing (e.g.inherited) parameter g = default(10); // overrides default value of existing parameter h; // legal, but does nothing i @foo(1); // adds a property to existing parameter j @foo(1) = 10; // adds a property and value to existing parameter
Parameter values are NED expressions. Expressions are described in section [19.5].
For volatile parameters, the value expression is evaluated every time the parameter value is accessed. Non-volatile parameters are evaluated only once.
- NOTE
The const keyword is reserved for future use within expressions to define constant subexpressions, i.e. to denote a part within an expression that should only be evaluated once. Constant subexpressions are not currently supported.
The following properties are recognized for parameters: @unit, @prompt, @mutable.
19.4.9.1 The @prompt Property¶
The @prompt property defines a prompt string for the parameter. The prompt string is used when/if a simulation runtime user interface interactively prompts the user for the parameter's value.
The @prompt property is expected to contain one string value for the default key.
19.4.9.2 The @unit Property¶
A parameter may have a @unit property to associate it with a measurement unit. The @unit property should contain one string value for the default key. Examples:
@unit(s) @unit(second)
When present, values assigned to the parameter must be in the same or in a compatible (that is, convertible) unit. Examples:
double a @unit(s) = 5s; // OK double a @unit(s) = 10ms; // OK; will be converted to seconds double a @unit(s) = 5; // error: should be 5s double a @unit(s) = 5kg; // error: incompatible unit
@unit behavior for non-numeric parameters (boolean, string, XML) is unspecified (may be ignored or may be an error).
The @unit property of a parameter may not be modified via inheritance.
Example:
simple A {
double p @unit(s);
}
simple B extends A {
p @unit(mW); // illegal: cannot override @unit
}
19.4.9.3 The @mutable Property¶
When a parameter is annotated with @mutable, the parameter's value is allowed to be changed at runtime, i.e. after its module has been set up. Parameters without the @mutable property cannot be changed at runtime.
19.4.10 Pattern Assignments¶
Pattern assignments allow one to set more than one parameter using wildcards, and to assign parameters deeper down in a submodule tree. Pattern assignments may occur in the parameters section of component types, submodules and connections.
The syntax of a pattern assignment is <pattern> = <value>.
A pattern consists of two or more pattern elements, separated by dots. The pattern element syntax is defined so that it can accommodate names of parameters, submodules (optionally with index), gates (optionally with the $i/$o suffix and/or index) and connections, and their wildcard forms. (The default name of connection channel objects is channel.)
Wildcard forms may use:
- Asterisks: They match zero or more characters except dots.
- Numeric ranges, {<start>..<end>} e.g. {5..120} or {..10}. They match numbers embedded in identifiers, that is, a sequence of decimal digit characters interpreted as a nonnegative integer that is within the specified start..end range (both limits are inclusive). Both start and end are optional.
- Numeric index ranges,[<start>..<end>]. e.g. [5..120] or [..10]. They are intended for selecting submodule and gate index ranges. They match a nonnegative integer enclosed in square brackets that is within the specified start..end range (both limits are inclusive). Both start and end are optional.
- Double asterisks: They match zero or more characters (including dots), and can be used to match more than one parameter path elements.
See the NED language grammar (Appendix [20]) for a more formal definition of the pattern syntax.
Examples:
host1.tcp.mss = 512B;
host*.tcp.mss = 512B; // matches host, host1, host2, hostileHost, ...
host{9..11}.tcp.mss = 512B; // matches host9/host10/host11, but nothing else
host[9..11].tcp.mss = 512B; // matches host[9]/host[10]/host[11], but nothing else
**.mss = 512B; // matches foo.mss, host[1].transport.tcp[0].mss, ...
19.4.11 Gates¶
Gates can be defined in the gates section of component types. The size of a gate vector (see below) may be specified at the place of defining the gate, via inheritance in a derived type, and also in the gates block of a submodule body. A submodule body does not allow defining new gates.
A gate is identified by a name, and is characterized by a type (input, output, inout) and optionally a vector size. Gates may also have properties (see [19.4.8]).
Gates may be scalar or vector. The vector size is specified with a numeric expression inside square brackets. The vector size may also be left unspecified by writing an empty pair of square brackets.
An already specified gate vector size may not be overridden in subclasses or in a submodule.
The presence of a gate type keyword determines whether the given line defines a new gate or refers to an existing gate. One can specify the gate vector size for an existing gate vector, and/or modify its properties, or add new properties.
Examples:
gates: input a; // defines new gate input b @foo; // new gate with property input c[]; // new gate vector with unspecified size input d[8]; // new gate vector with size=8 e[10]; // set gate size for existing (e.g.inherited) gate vector f @foo(bar); // add property to existing gate g[10] @foo(bar); // set gate size and add property to existing gate
Gate vector sizes are NED expressions. Expressions are described in section [19.5].
See the Connections section ([19.4.13]) for more information on gates.
19.4.11.1 Recognized Gate Properties¶
The following properties are recognized for gates: @directIn and @loose. They have the same effect: When either of them is present on a gate, the gate is not required to be connected in the connections section of a compound module (see [19.4.13]).
@directIn should be used when the gate is an input gate that is intended for being used as a target for the sendDirect() method; @loose should be used in any other case when the gate is not required to be connected for some reason.
- NOTE
The reason @directIn gates are not required to remain unconnected is that it is often useful to wrap such modules in a compound module, where the compound module also has a @directIn input gate that is internally connected to the submodule's corresponding gate.
Example:
gates:
input radioIn @directIn;
19.4.12 Submodules¶
Submodules are defined in the submodules section of the compound module.
The type of the submodule may be specified statically or parametrically.
Submodules may be scalar or vector. The size of submodule vectors must be specified as a numeric expression inside square brackets.
Submodules may also be conditional.
A submodule definition may or may not have a body (a curly brace delimited block). An empty submodule body is equivalent to a missing one.
Syntax examples:
submodules:
ip : IP; // scalar submodule without body
tcp : TCP {} // scalar submodule with empty body
app[10] : App; // submodule vector
19.4.12.1 Submodule Type¶
The simple or compound module type ([19.4.1], [19.4.2]) that will be instantiated as the submodule may be specified either statically (with a concrete module type name) or parametrically.
19.4.12.2 Static Submodule Type¶
Submodules with a statically defined type are those that contain a concrete NED module type name. Example:
tcp : TCP;
See section [19.4.18] for the type resolution rules.
19.4.12.3 Parametric Submodule Type¶
Parametric submodule type means that the NED type name is given in a string expression. The string expression may be specified locally in the submodule declaration, or elsewhere using typename patterns (see later).
Parametric submodule types are syntactically denoted by the presence of an expression in a pair of angle brackets and the like keyword followed by a module interface type [19.4.5] that a module type must implement in order to be eligible to be chosen. The angle brackets may be empty, contain a string expression, or contain a default string expression (default(...) syntax).
Examples:
tcp : <tcpType> like ITCP; // type comes from parent module parameter
tcp : <"TCP_"+suffix> like ITCP; // expression using parent module parameter
tcp : <> like ITCP; // type must be specified elsewhere
tcp : <default("TCP")> like ITCP; // type may be specified elsewhere;
// if not, the default is "TCP"
tcp : <default("TCP_"+suffix)> like ITCP;
// type may be specified elsewhere;
// if not, the default is an expression
See the NED Grammar (Appendix [20]) for the formal syntax, and section [19.4.19] for the type resolution rules.
19.4.12.4 The @dynamic Property¶
The @dynamic property is only recognized for submodules. The value may be empty, true or false; @dynamic is equivalent to @dynamic(true).
When a submodule is marked as dynamic inside a compound module, the submodule will not be instantiated when the compound module is created; rather, it is expected that it will be instantiated at runtime, using dynamic module creation. A module created this way will pick up parameter values from the submodule declaration in the NED file as well as from the ini file. Dynamic submodules may be displayed in the graphical NED editor as semi-transparent, allowing them to be edited and configured like other submodules.
19.4.12.5 Conditional Submodules¶
Submodules may be made conditional using the if keyword. The condition expression must evaluate to a boolean; if the result is false, the submodule is not created, and trying to connect its gates or reference its parameters will be an error.
An example:
submodules:
tcp : TCP if withTCP { ... }
19.4.12.6 Parameters, Gates¶
A submodule body may contain parameters ([19.4.9]) and gates ([19.4.5]).
A submodule body cannot define new parameters or gates. It is only allowed to assign existing parameters, and to set the vector size of existing gate vectors.
It is also allowed to add or modify submodule properties and parameter/gate properties.
19.4.13 Connections¶
Connections are defined in the connections section of the compound module.
Connections may not span multiple hierarchy levels, that is, a connection may be created between two submodules, a submodule and the compound module, or between two gates of the compound module.
Normally, all gates must be connected, including submodule gates and the gates of the compound module. When the allowunconnected modifier is present after connections, gates will be allowed to be left unconnected.
- NOTE
The @directIn and @loose gate properties are alternatives to the connections allowunconnected syntax; see [19.4.11].
Connections may be conditional, and may be created using loops (see [19.4.14]).
19.4.13.1 Connection Syntax¶
The connection syntax uses arrows (-->, <--) to connect input and output gates, and double arrows (<-->) to connect inout gates. The latter is also said to be a bidirectional connection.
Arrows point from the source gate (a submodule output gate or a compound module input gate) to the destination gate (a submodule input gate or a compound module output gate). Connections may be written either left to right or right to left, that is, a-->b is equivalent to b<--a.
Gates are specified as <modulespec>.<gatespec> (to connect a submodule), or as <gatespec> (to connect the compound module). <modulespec> is either a submodule name (for scalar submodules), or a submodule name plus an index in square brackets (for submodule vectors). For scalar gates, <gatespec> is the gate name; for gate vectors it is either the gate name plus a numeric index expression in square brackets, or <gatename>++.
The <gatename>++ notation causes the first unconnected gate index to be used. If all gates of the given gate vector are connected, the behavior is different for submodules and for the enclosing compound module. For submodules, the gate vector expands by one. For the compound module, it is an error to use ++ on a gate vector with no unconnected gates.
Syntax examples:
connections: a.out --> b.in; // unidirectional between two submodules c.in[2] <-- in; // parent-to-child; gate vector with index d.g++ <--> e.g++; // bidirectional, auto-expanding gate vectors
- Rationale
The reason it is not supported to expand the gate vector of the compound module is that the module structure is built in top-down order: new gates would be left unconnected on the outside, as there is no way in NED to "go back" and connect them afterwards.
When the ++ operator is used with $i or $o (e.g. g$i++ or g$o++, see later), it will actually add a gate pair (input+output) to maintain equal gate size for the two directions.
The syntax to associate a channel (see [19.4.4]) with the connection is to use two arrows with a channel specification in between (see later). The same syntax is used to add properties such as @display to the connection.
19.4.13.2 Inout Gates¶
An inout gate is represented as a gate pair: an input gate and an output gate. The two sub-gates may also be referenced and connected individually, by adding the $i and $o suffix to the name of the inout gate.
A bidirectional connection (which uses a double arrow to connect two inout gates), is also a shorthand for two uni-directional connections; that is,
a.g <--> b.g;
is equivalent to
a.g$o --> b.g$i; a.g$i <-- b.g$o;
In inout gate vectors, gates are always in pairs, that is, sizeof(g$i)==sizeof(g$o) always holds. It is maintained even when g$i++ or g$o++ is used: the ++ operator will add a gate pair, not just an input or an output gate.
19.4.13.3 Specifying Channels¶
A channel specification associates a channel object with the connection. A channel object is an instance of a channel type (see [19.4.4]).
- NOTE
As bidirectional connections are a shorthand for a pair of uni-directional connections, they will actually create two channel objects, one for each direction.
The channel type to be instantiated may be implicit, or may be specified statically or parametrically.
A connection may have a body (a curly brace delimited block) for setting properties and/or parameters of the channel.
A connection syntax allows one to specify a name for the channel object. When not specified, the channel name will be taken from the @defaultname property of the channel type; when there is no such property, it will be "channel". Custom connection names can be useful for easier addressing of channel objects when assigning parameters using patterns.
See subsequent sections for details.
19.4.13.4 Implicit Channel Type¶
If the connection syntax does not say anything about the channel type, it is implicitly determined from the set of connection parameters used.
Syntax examples for connections with implicit channel types:
a.g <--> b.g; // no parameters
a.g <--> {delay = 1ms;} <--> b.g; // assigns delay
a.g <--> {datarate = 100Mbps; delay = 50ns;} <--> b.g; // assigns delay and datarate
For such connections, the actual NED type to be used will depend on the parameters set in the connection:
- When no parameters are set, ned.IdealChannel is chosen.
- When only ned.DelayChannel parameters are used (delay and disabled), ned.DelayChannel is chosen.
- When only ned.DatarateChannel parameters are used (datarate, delay, ber, per, disabled), the chosen channel type will be ned.DatarateChannel.
Connections with implicit channel types may not use any other parameter.
19.4.13.5 Static Channel Type¶
Connections with a statically defined channel type are those that contain a concrete NED channel type name.
Examples:
a.g <--> FastEthernet <--> b.g;
a.g <--> FastEthernet {per = 1e-6;} <--> b.g;
See section [19.4.18] for the type resolution rules.
19.4.13.6 Parametric Channel Type¶
Parametric channel types are similar to parametric submodule types, described in section [19.4.12].
Parametric channel type means that the NED type name is given in a string expression. The string expression may be specified locally in the connection declaration, or elsewhere using typename patterns (see later).
Parametric channel types are syntactically denoted by the presence of an expression in a pair of angle brackets and the like keyword followed by a channel interface type [19.4.6] that a channel type must implement in order to be eligible to be chosen. The angle brackets may be empty, contain a string expression, or contain a default string expression (default(...) syntax).
Examples:
a.g++ <--> <channelType> like IMyChannel <--> b.g++;
// type comes from parent module parameter
a.g++ <--> <"Ch_"+suffix> like IMyChannel <--> b.g++;
// expression using parent module parameter
a.g++ <--> <> like IMyChannel <--> b.g++;
// type must be specified elsewhere
a.g++ <--> <default("MyChannel")> like IMyChannel <--> b.g++;
// type may be specified elsewhere;
// if not, the default is "MyChannel"
a.g++ <--> <default("Ch_"+suffix)> like IMyChannel <--> b.g++;
// type may be specified elsewhere;
// if not, the default is an expression
See the NED Grammar (Appendix [20]) for the formal syntax, and section [19.4.19] for the type resolution rules.
19.4.13.7 Channel Parameters and Properties¶
A channel definition may or may not have a body (a curly brace delimited block). An empty channel body ({ }) is equivalent to a missing one.
A channel body may contain parameters ([19.4.9]).
A channel body cannot define new parameters. It is only allowed to assign existing parameters.
It is also allowed to add or modify properties and parameter properties.
19.4.14 Conditional and Loop Connections, Connection Groups¶
The connections section may contain any number of connections and connection groups. A connection group is one or more connections grouped with curly braces.
Both connections and connection groups may be conditional (if keyword) or may be multiple (for keyword).
Any number of for and if clauses may be added to a connection or connection loop; they are interpreted as if they were nested in the given order. Loop variables of a for may be referenced from subsequent conditions and loops as well as in module and gate index expressions in the connections.
See the NED Grammar ([20]) for the exact syntax.
Example connections:
a.out --> b.in; c.out --> d.in if p>0; e.out[i] --> f[i].in for i=0..sizeof(f)-1, if i%2==0;
Example connection groups:
if p>0 {
a.out --> b.in;
a.in <-- b.out;
}
for i=0..sizeof(c)-1, if i%2==0 {
c[i].out --> out[i];
c[i].in <-- in[i];
}
for i=0..sizeof(d)-1, for j=0..sizeof(d)-1, if i!=j {
d[i].out[j] --> d[j].in[i];
}
for i=0..sizeof(e)-1, for j=0..sizeof(e)-1 {
e[i].out[j] --> e[j].in[i] if i!=j;
}
19.4.15 Inner Types¶
Inner types can be defined in the types section of compound modules, with the same syntax as toplevel (i.e. non-inner) types.
Inner types may not contain further inner types, that is, type nesting is limited to two levels.
Inner types are only visible inside the enclosing component type and its subclasses.
19.4.16 Name Uniqueness¶
Identifier names within a component must be unique. That is, the following items in a component are considered to be in the same name space and must not have colliding names:
- parameters
- gates
- submodules
- inner types
- the above items of super type(s)
For example, a gate and a submodule cannot have the same name.
19.4.17 Parameter Assignment Order¶
A module or channel parameter may be assigned in parameters blocks (see [19.4.9]) at various places in NED: in the module or channel type that defines it; in the type's subclasses; in the submodule or connection that instantiates the type. The parameter may also be assigned using pattern assignments (see [19.4.10]) in any compound module that uses the given module or channel type directly or indirectly.
Patterns are matched against the relative path of the parameter, which is the relative path of its submodule or connection, with a dot and the parameter name appended. The relative path is composed of a list of submodule names (name plus index) separated by dots; a connection is identified by the full name of its source gate plus the name of the channel object (which is currently always channel) separated by a dot.
- NOTE
As bidirectional connections are a shorthand for two unidirectional connections, the source gate name is qualified with $i or $o in the relative path.
Note that the parameters keyword itself is optional, and is usually not written out in submodules and connections.
This section describes the module and channel parameter assignments procedure.
The general rules are the following:
- A (non-default) parameter assignment may not be overridden later; that is, if there are assignments in multiple places, the assignment “closest” to the parameter declaration will be effective; others will be flagged as errors.
- A default value is only used if a non-default value is not present for the given parameter. A non-default value may also come from a source external to NED, namely the simulation configuration (omnetpp.ini).
- Unlike non-default values, a default value may be overridden; that is, if there are default value assignments in multiple places, the assignment “farthest” from the parameter declaration will win.
- Among pattern assignments within the same parameters block, the first match will win. Pattern assignments with default and non-default values are considered to be two disjoint sets, only one of which are searched at a time.
This yields the following conceptual search order for non-default parameter assignments:
- First, the NED type that contains the parameter declaration is checked;
- Then its subclasses are checked;
- Then the submodule or connection that instantiates the type is checked;
- Then the compound module that contains the submodule or connection is checked for matching pattern assignments;
- Then, assuming the compound module is part of a network, the search for matching pattern assignments continues up on the module tree until the root (the module that represents the network). At each level (compound module), first the specific submodule definition is checked, then the (parent) compound module. If a compound module is subclassed before instantiated, the base type is checked first.
When no (non-default) assignment is found, the same places are searched in the reverse order for default value assignments. If no default value is found, an error may be raised or the user may be interactively prompted.
To illustrate the above rules, consider the following example where we want to assign parameter p:
simple A { double p; }
simple A2 extends A {...}
module B { submodules: a2: A2 {...} }
module B2 extends B {...}
network C { submodules: b2: B2 {...} }
Here, the search order is: A, A2, a2, B, B2, b2, C. NED conceptually searches the parameters blocks in that order for a (non-default) value, and then in reverse order for a default value.
The full search order and the form of assignment expected on each level:
- A { p = ...; }
- A2 { p = ...; }
- a2 { p = ...; }
- B { a2.p = ...; }
- B2 { a2.p = ...; }
- b2 { a2.p = ...; }
- C { b2.a2.p = ...; }
- C { b2.a2.p = default(...); }
- b2 { a2.p = default(...); }
- B2 { a2.p = default(...); }
- B { a2.p = default(...); }
- a2 { p = default(...); }
- A2 { p = default(...); }
- A { p = default(...); }
If only a default value is found or not even that, external configuration has a say. The configuration may contain an assignment for C.b2.a2.p; it may apply the default if there is one; it may ask the user interactively to enter a value; or if there is no default, it may raise an error “no value for parameter”.
19.4.18 Type Name Resolution¶
Names from other NED files can be referred to either by fully qualified name (“inet.networklayer.ip.RoutingTable”), or by short name (“RoutingTable”) if the name is visible.
Visible names are:
- inner types of the same type or its super types;
- anything from the same package;
- imported names.
19.4.18.1 Imports¶
Imports have a similar syntax to Java, but they are more flexible with wildcards. All of the following are legal:
import inet.networklayer.ipv4.RoutingTable; import inet.networklayer.ipv4.*; import inet.networklayer.ipv4.Ro*Ta*; import inet.*.ipv4.*; import inet.**.RoutingTable;
One asterisk stands for any character sequence not containing dots; and a double asterisk stands for any character sequence (which may contain dots). No other wildcards are recognized.
An import not containing a wildcard must match an existing NED type. However, it is legal for an import that does contain wildcards not to match any NED type (although that might generate a warning.)
Inner types may not be referenced outside their enclosing types and their subclasses.
19.4.18.2 Base Types and Submodules¶
Fully qualified names and simple names are accepted. Simple names are looked up among the inner types of the enclosing type (compound module), then using imports, then in the same package.
19.4.18.3 Network Name in the Ini File¶
The network name in the ini file may be given as a fully qualified name or as a simple (unqualified) name.
Simple (unqualified) names are tried with the same package as the ini file is in (provided it is in a NED directory).
19.4.19 Resolution of Parametric Types¶
This section describes the type resolution for submodules and connections that are defined using the like keyword.
Type resolution is done in two steps. In the first step, the type name string expression is found and evaluated. Then in the second step, the resulting type name string is resolved to an actual NED type.
Step 1. The lookup of the type name string expression is similar to that of a parameter value lookup ([19.4.17]).
The expression may be specified locally (between the angle brackets), or using typename pattern assignments in any compound module that contains the submodule or connection directly or indirectly. A typename pattern is a pattern that ends in .typename.
Patterns are matched against the relative path of the submodule or connection, with .typename appended. The relative path is composed of a list of submodule names (name plus index) separated by dots; a connection is identified by the full name of its source gate plus the name of the channel object (which is currently always channel) separated by a dot.
- NOTE
As bidirectional connections are a shorthand for two unidirectional connections, the source gate name is qualified with $i or $o in the relative path.
An example that uses typename pattern assignment:
module Host {
submodules:
tcp: <> like ITCP;;
...
connections:
tcp.ipOut --> <> like IMyChannel --> ip.tcpIn;
}
network Network {
parameters:
host[*].tcp.typename = "TCP_lwIP";
host[*].tcp.ipOut.channel.typename = "DebugChannel";
submodules:
host[10] : Host;
...
}
The general rules are the following:
- A (non-default) parameter assignment may not be overridden later; that is, if there are assignments in multiple places, the assignment “closest” to the submodule or connection definition will be effective; others will be flagged as errors.
- A default value is only used if a non-default value is not present. A non-default value may also come from a source external to NED, namely the simulation configuration (omnetpp.ini).
- Unlike non-default values, a default value may be overridden; that is, if there are default value assignments in multiple places, the assignment “farthest” from the submodule or connection definition will win.
- Among pattern assignments within the same parameters block, the first match will win. Patterns assignments with default and non-default values are considered to be two disjoint sets, only one of which are searched at a time.
This yields the following conceptual search order for typename assignments:
- First, the submodule or connection definition is checked (angle brackets);
- Then the compound module that contains the submodule or connection is checked for matching pattern assignments;
- Then, assuming the compound module is part of a network, the search for matching pattern assignments continues up on the module tree until the root (the module that represents the network). At each level (compound module), first the specific submodule definition is checked, then the (parent) compound module. If a compound module is subclassed before instantiated, the base type is checked first.
When no (non-default) assignment is found, the same places are searched in the reverse order for default value assignments. If no default value is found, an error may be raised or the user may be interactively prompted.
To illustrate the above rules, consider the following example:
module A { submodules: h: <> like IFoo; }
module A2 extends A {...}
module B { submodules: a2: A2 {...} }
module B2 extends B {...}
network C { submodules: b2: B2 {...} }
Here, the search order is: h, A, A2, a2, B, B2, b2, C. NED conceptually searches the parameters blocks in that order for a (non-default) value, and then in reverse order for a default value.
The full search order and the form of assignment expected on each level:
- h: <...> like IFoo;
- A { h.typename = ...; }
- A2 { h.typename = ...; }
- a2 { h.typename = ...; }
- B { a2.h.typename = ...; }
- B2 { a2.h.typename = ...; }
- b2 { a2.h.typename = ...; }
- C { b2.a2.h.typename = ...; }
- C { b2.a2.h.typename = default(...); }
- b2 { a2.h.typename = default(...); }
- B2 { a2.h.typename = default(...); }
- B { a2.h.typename = default(...); }
- a2 { h.typename = default(...); }
- A2 { h.typename = default(...); }
- A { h.typename = default(...); }
- h: <default(...)> like IFoo;
If only a default value is found or not even that, external configuration has a say. The configuration may contain an assignment for C.b2.a2.h.typename; it may apply the default value if there is one; it may ask the user interactively to enter a value; or if there is no default value, it may raise an error “cannot determine submodule type”.
Step 2. The type name string is expected to hold the simple name or fully qualified name of the desired NED type. Resolving the type name string to an actual NED type differs from normal type name lookups in that it ignores the imports in the file altogether. Instead, a list of NED types that have the given simple name or fully qualified name and implement the given interface is collected. The result must be exactly one module or channel type.
19.4.20 Implementing an Interface¶
A module type may implement one or more module interfaces, and a channel type may implement one or more channel interfaces, using the like keyword.
The module or channel type is required to have at least those parameters and gates that the interface has.
Regarding component properties, parameter properties and gate properties defined in the interface: the module or channel type is required to have at least the properties of the interface, with at least the same values. The component may have additional properties, and properties may add more keys and values.
- NOTE
Implementing an interface does not cause the properties, parameters and gates to be interited by the module or channel type; they have to be added explicitly.
- NOTE
A module or channel type may have extra properties, parameters and gates in addition to those in the interface.
19.4.21 Inheritance¶
Component inheritance is governed by the following rules:
- A simple module may only extend a simple module.
- A compound module may only extend a compound module or a simple module.
- A channel may only extend a channel.
- A module interface may only extend a module interface (or several module interfaces).
- A channel interface may only extend a channel interface (or several channel interfaces).
A network is a shorthand for a compound module with the @isNetwork property set, so the same rules apply to it as to compound modules.
Inheritance may:
- add new properties, parameters, gates, inner types, submodules, connections, as long as names do not conflict with inherited names
- modify inherited properties, and properties of inherited parameters and gates
- it may not modify inherited submodules, connections and inner types
Other inheritance rules:
- for inner types: new inner types can be added, but inherited ones cannot be changed
- for properties: contents will be merged (rules like for display strings: values on same key and same position will overwrite old ones)
- for parameters: type cannot be redefined; value may be redefined in subclasses or at place of usage
- for gates: type cannot be redefined; vector size may be specified in subclasses or at place of usage if it was unspecified
- for gate/parameter properties: extra properties can be added; existing properties can be overridden/extended as for standalone properties
- for submodules: new submodules may be added, but inherited ones cannot be modified
- for connections: new connections may be added, but inherited ones cannot be modified
The following sections will elaborate on the above rules.
19.4.21.1 Property Inheritance¶
Generally, properties may be modified via inheritance. Inheritance may:
- add new keys
- add/overwrite values for existing keys
- remove a value from an existing key by using hyphen as a special value
19.4.21.2 Parameter Inheritance¶
Default values for parameters may be overridden in subclasses.
19.4.21.3 Gate Inheritance¶
Gate vector size may not be overridden in subclasses.
19.4.22 Network Build Order¶
When a network is instantiated for simulation, the module tree is built in a top-down preorder fashion. This means that starting from an empty system module, all submodules are created, their parameters and vector sizes are assigned, and they get fully connected before proceeding to go into the submodules to build their internals.
This implies that inside a compound module definition (including in submodules and connections), one can refer to the compound module's parameters and gate sizes, because they are already built at the time of usage.
The same rules apply to compound or simple modules created dynamically during runtime.
19.5 Expressions¶
NED language expressions have a C-like syntax, with some variations on operator names (see ^, #, ##). Expressions may refer to module parameters, loop variables (inside connection for loops), gate vector and module vector sizes, and other attributes of the model. Expressions can also use built-in and user-defined functions. There is a JSON-like notation for defining arrays and objects (dictionary-like).
- NOTE
New NED functions can be defined in C++; refer to section [7.12].
19.5.1 Constants¶
Refer to section [19.1.6].
19.5.2 Array and Object Values¶
A bracketed list of zero or more comma-separated expressions denotes an array value. For example: [9.81, false, "Hello"].
A list of zero or more comma-separated key-value pairs enclosed in a pair of curly braces denotes an object value. A key and a value are separated by a colon. A key may be a name or a string literal. A value may be an arbitrary expression, including a list or an object. The open brace may be preceded by an (optionally namespace-qualified) class name. Example 1: {name:"John", age: 31}. Example 2 (includes class name): Filter {dest:"10.0.0.1", port:1200}.
Array and object values may be assigned to parameters of type object. Note that null / nullptr are also of type object.
Array values are represented with the C++ class cValueArray, and by default, object values with the C++ class cValueMap. If the object notation includes a class name, then the named C++ class will be used instead of cValueMap, and filled in using the key-value list with the help of the class descriptor (cClassDescriptor) of the class, interpreting keys as field names.
19.5.3 Operators¶
The following operators are supported (in order of decreasing precedence):
|
Operator | Meaning |
| -, !, | unary minus, negation, bitwise complement |
| ^ | power-of |
| *, /, % | multiply, divide, integer modulo |
| +, - | add, subtract, string concatenation |
| <<, >> | bitwise shift |
| & | bitwise and |
| # | bitwise xor |
| | | bitwise or |
| = | string match |
| <=> | three-way comparison, a.k.a. “spaceship operator” |
| >, >= | greater than, greater than or equal to |
| <, <= | less than, less than or equal to |
| == | equal |
| != | not equal |
| && | logical operator and |
| ## | logical operator xor |
| || | logical operator or |
| ?: | the C/C++ “inline if” |
The spaceship operator is defined as follows. The result of a <=> b is negative if a<b, zero if a==b, and positive if a>b. If either a or b is nan (not-a-number), the result is nan as well.
The string match operator works as follows. x =
- Asterisk * matches zero or more of any character except dot
- Double asterisk ** matches zero or more characters (including dot)
- Curly braces containing a numeric range match an embedded whole number in that range
- Square brackets containing a numeric range match a number in that range enclosed in square brackets
- A numeric range has the syntax of <start>..<end>, where both <start> and <end> are integers (optional)
The interpretation of other operators is similar to that in C/C++.
19.5.3.1 Conversions¶
Values may have the same types as NED parameters: boolean, integer, double, string, XML element, and object. An integer or double value may have an associated measurement unit (e.g., s, mW).
Double-to-integer conversions require explicit casting using the int() function. There is no implicit conversion.
Integer-to-double conversion is implicit. However, a runtime error will be raised if there is precision loss during the conversion, i.e., the integer is too large to be precisely represented in a double. To suppress this error, an explicit cast (double()) can be used.
There is no implicit conversion between boolean and numeric types. Thus, 0 is not a synonym for false, and nonzero numbers are not a synonym for true.
There is also no conversion between string and numeric types. For example, "foo"+5 is illegal. However, there are functions for converting a number to a string and vice versa.
Bitwise operators expect integer arguments.
- NOTE
Integers are represented with 64-bit signed integers (int64_t in C++).
19.5.3.2 Unit Handling¶
Operations involving numbers with units work as follows:
Addition, subtraction, and numeric comparisons require their arguments to have the same unit or compatible units. If the units are compatible, a unit conversion is performed before the operation. Incompatible units cause an error.
Modulo, power-of, and the bitwise operations require their arguments to be dimensionless. Otherwise, the result would depend on the choice of the unit.
- NOTE
If a floating-point modulo operator that handles units is needed, the fmod() function can be used.
Multiplying two numbers with units is not supported.
For division, dividing two numbers with units is only supported if the two units are convertible (i.e., the result will be dimensionless). Dividing a dimensionless number with a number with a unit is not supported.
Operations involving quantities with logarithmic units (e.g., dB, dBW) are not supported, except for comparisons. The reason is that such operations would be easy to misinterpret. For example, it is not obvious whether 10dB+10dB (3.16+3.16) should evaluate to 20dB (=10.0) or to 16.02dB (=2*3.16=6.32), considering that such quantities would often be hidden behind parameter names where the unit is not obvious.
19.5.4 Referencing Parameters and Loop Variables¶
Identifiers in expressions occurring anywhere in component definitions are interpreted as referring to parameters of the given component. For example, identifiers inside submodule bodies refer to the parameters of the compound module.
Expressions may also refer to parameters of submodules defined earlier in the
NED file using the submoduleName.paramName or the
submoduleName[index].paramName syntax. To refer to parameters of the local
module/channel inside a submodule or channel body, use the this
qualifier: this.destAddress. To make a reference to a parameter of the
compound module from within a submodule or channel body explicit, use the
parent qualifier: parent.destAddress.
- [The
parent qualifier is available from OMNeT++ 5.7.]
Exception: if an identifier occurs in a connection for loop and names a previously defined loop variable, it is understood as referring to the loop variable.
19.5.5 The typename Operator¶
The typename operator returns the NED type name as a string. If it occurs inside a component definition but outside a submodule or channel block, it returns the type name of the component being defined. If it occurs inside a submodule or channel block, it returns the type name of that submodule or channel.
The typename operator can also occur in the if condition of a scalar submodule or connection. In such cases, it evaluates to the would-be type name of the submodule or condition. This allows for conditional instantiation of parametric-type submodules, controlled from a typename assignment. (For example, by using the if typename!= "" condition, one allows the submodule to be omitted by configuring typename="" for it.)
The typename operator is not allowed in a submodule vector's if condition. The reason is that the condition applies to the vector as a whole while the type is per-element.
19.5.6 The index Operator¶
The index operator is only allowed in a vector submodule's body and yields the index of the submodule instance.
19.5.7 The exists() Operator¶
The exists() operator takes one identifier as an argument and is only accepted in compound module definitions. The identifier must name a previously defined submodule, which will typically be a conditional submodule. The operator returns true if the given submodule exists (has been created), and false otherwise.
19.5.8 The sizeof() Operator¶
The sizeof() operator expects one argument and is only accepted in compound module definitions.
The sizeof(identifier) syntax occurring anywhere in a compound module yields the size of the named submodule or gate vector of the compound module.
Inside submodule bodies, the size of a gate vector of the same submodule can be referred to with the this qualifier: sizeof(this.out).
To refer to the size of a submodule's gate vector defined earlier in the NED file, use the sizeof(submoduleName.gateVectorName) or sizeof(submoduleName[index].gateVectorName) syntax.
19.5.9 The expr() Operator¶
The expr() operator allows a mathematical formula or other expression to be passed to a component as an object. expr() expects an expression as an argument and returns an object that encapsulates the expression in a parsed form. In the intended use case, the returned expression object is assigned to a module parameter and is later utilized by user code (a component implementation) by binding its free variables and evaluating it. Identifiers in the expression are not interpreted as parameter references as in NED but as free variables.
19.5.10 Functions¶
The functions available in NED are listed in Appendix [22].
Selected functions are documented below.
19.5.10.1 The xmldoc() Function¶
The xmldoc() NED function can be used to assign xml parameters, that is, point them to XML files or to specific elements inside XML files.
xmldoc() accepts a file name as well as an optional second string argument that contains an XPath-like expression.
The XPath expression is used to select an element within the document. If the expression matches several elements, the first element (in preorder depth-first traversal) will be selected (unlike XPath, which selects all matching nodes).
The expression syntax is as follows:
- An expression consists of path components (or "steps") separated by "/" or "//".
- A path component can be an element tag name, "*", ".", or "..".
- "/" means child element (just like in /usr/bin/gcc), while "//" means an element at any level under the current element.
- ".", "..", and "*" mean the current element, the parent element, and an element with any tag name, respectively.
- Element tag names and "*" can have an optional predicate in the form "[position]" or "[@attribute='value']". Positions start from zero.
- Predicates of the form "[@attribute=$param]" are also accepted, where $param can be one of the following items: $MODULE_FULLPATH, $MODULE_FULLNAME, $MODULE_NAME, $MODULE_INDEX, $MODULE_ID, $PARENTMODULE_FULLPATH, $PARENTMODULE_FULLNAME, $PARENTMODULE_NAME, $PARENTMODULE_INDEX, $PARENTMODULE_ID, $GRANDPARENTMODULE_FULLPATH, $GRANDPARENTMODULE_FULLNAME, $GRANDPARENTMODULE_NAME, $GRANDPARENTMODULE_INDEX, $GRANDPARENTMODULE_ID.
19.5.10.2 The xml() Function¶
The xml() NED function can be used to parse a string as an XML document and assign the result to an xml parameter.
xml() accepts the string to be parsed as well as an optional second string argument that contains an XPath-like expression.
The XPath expression is used in the same manner as with the xmldoc() function.
19.5.11 Units of Measurement¶
The following measurement units are recognized in constants. Other units can be used as well, but there are no conversions available for them (i.e., parsec and kiloparsec will be treated as two completely unrelated units).
|
Unit | Name | Value |
| d | day | 86400s |
| h | hour | 3600s |
| min | minute | 60s |
| s | second | |
| ms | millisecond | 0.001s |
| us | microsecond | 1e-6s |
| ns | nanosecond | 1e-9s |
| ps | picosecond | 1e-12s |
| fs | femtosecond | 1e-15s |
| as | attosecond | 1e-18s |
| bps | bit/sec | |
| kbps | kilobit/sec | 1000bps |
| Mbps | megabit/sec | 1e6bps |
| Gbps | gigabit/sec | 1e9bps |
| Tbps | terabit/sec | 1e12bps |
| B | byte | 8b |
| KiB | kibibyte | 8192b |
| MiB | mebibyte | 8.38861e6b |
| GiB | gibibyte | 8.58993e9b |
| TiB | tebibyte | 8.79609e12b |
| kB | kilobyte | 8000b |
| MB | megabyte | 8e6b |
| GB | gigabyte | 8e9b |
| TB | terabyte | 8e12b |
| b | bit | |
| Kib | kibibit | 1024b |
| Mib | mebibit | 1.04858e6b |
| Gib | gibibit | 1.07374e9b |
| Tib | tebibit | 1.09951e12b |
| kb | kilobit | 1000b |
| Mb | megabit | 1e6b |
| Gb | gigabit | 1e9b |
| Tb | terabit | 1e12b |
| rad | radian | |
| deg | degree | 0.0174533rad |
| m | meter | |
| dm | decimeter | 0.1m |
| cm | centimeter | 0.01m |
| mm | millimeter | 0.001m |
| um | micrometer | 1e-6m |
| nm | nanometer | 1e-9m |
| km | kilometer | 1000m |
| W | watt | |
| mW | milliwatt | 0.001W |
| uW | microwatt | 1e-6W |
| nW | nanowatt | 1e-9W |
| pW | picowatt | 1e-12W |
| fW | femtowatt | 1e-15W |
| kW | kilowatt | 1000W |
| MW | megawatt | 1e6W |
| GW | gigawatt | 1e9W |
| Hz | hertz | |
| kHz | kilohertz | 1000Hz |
| MHz | megahertz | 1e6Hz |
| GHz | gigahertz | 1e9Hz |
| THz | terahertz | 1e12Hz |
| kg | kilogram | |
| g | gram | 0.001kg |
| t | tonne | 1000kg |
| K | kelvin | |
| J | joule | |
| kJ | kilojoule | 1000J |
| MJ | megajoule | 1e6J |
| Ws | watt-second | 1J |
| Wh | watt-hour | 3600J |
| kWh | kilowatt-hour | 3.6e6J |
| MWh | megawatt-hour | 3.6e9J |
| V | volt | |
| kV | kilovolt | 1000V |
| mV | millivolt | 0.001V |
| A | ampere | |
| mA | milliampere | 0.001A |
| uA | microampere | 1e-6A |
| Ohm | ohm | |
| mOhm | milliohm | 0.001Ohm |
| kOhm | kiloohm | 1000Ohm |
| MOhm | megaohm | 1e6Ohm |
| mps | meter/sec | |
| kmps | kilometer/sec | 1000mps |
| kmph | kilometer/hour | (1/3.6)mps |
| C | coulomb | 1As |
| As | ampere-second | |
| mAs | milliampere-second | 0.001As |
| Ah | ampere-hour | 3600As |
| mAh | milliampere-hour | 3.6As |
| x | times | |
| dBW | decibel-watt | 10*log10(W) |
| dBm | decibel-milliwatt | 10*log10(mW) |
| dBmW | decibel-milliwatt | 10*log10(mW) |
| dBV | decibel-volt | 20*log10(V) |
| dBmV | decibel-millivolt | 20*log10(mV) |
| dBA | decibel-ampere | 20*log10(A) |
| dBmA | decibel-milliampere | 20*log10(mA) |
| dB | decibel | 20*log10(x) |
20 Appendix B: NED Language Grammar¶
This appendix contains the grammar for the NED language.
In the NED language, space, horizontal tab and new line characters count as delimiters, so one or more of them is required between two elements of the description which would otherwise be unseparable.
The // symbol (two slashes) begin comments that extend to the end of the line.
The language is case sensitive.
Notation:
- rule syntax is that of bison
- uppercase words are terminals, lowercase words are nonterminals
- NAME, STRINGCONSTANT, INTCONSTANT, REALCONSTANT represent identifier names and string, integer and real number literals (defined as in the C language, except that a 0 prefix does not stand for octal notation)
- other terminals represent keywords in all lowercase
nedfile
: definitions
| %empty
;
definitions
: definitions definition
| definition
;
definition
: packagedeclaration
| import
| propertydecl
| fileproperty
| channeldefinition
| channelinterfacedefinition
| simplemoduledefinition
| compoundmoduledefinition
| networkdefinition
| moduleinterfacedefinition
| ';'
;
packagedeclaration
: PACKAGE dottedname ';'
;
dottedname
: dottedname '.' NAME
| NAME
;
import
: IMPORT importspec ';'
;
importspec
: importspec '.' importname
| importname
;
importname
: importname NAME
| importname '*'
| importname '**'
| NAME
| '*'
| '**'
;
propertydecl
: propertydecl_header opt_inline_properties ';'
| propertydecl_header '(' opt_propertydecl_keys ')' opt_inline_properties ';'
;
propertydecl_header
: PROPERTY '@' PROPNAME
| PROPERTY '@' PROPNAME '[' ']'
;
opt_propertydecl_keys
: propertydecl_keys
| %empty
;
propertydecl_keys
: propertydecl_keys ';' propertydecl_key
| propertydecl_key
;
propertydecl_key
: property_literal
;
fileproperty
: property_namevalue ';'
;
channeldefinition
: channelheader '{'
opt_paramblock
'}'
;
channelheader
: CHANNEL NAME
opt_inheritance
;
opt_inheritance
: %empty
| EXTENDS extendsname
| LIKE likenames
| EXTENDS extendsname LIKE likenames
;
extendsname
: dottedname
;
likenames
: likenames ',' likename
| likename
;
likename
: dottedname
;
channelinterfacedefinition
: channelinterfaceheader '{'
opt_paramblock
'}'
;
channelinterfaceheader
: CHANNELINTERFACE NAME
opt_interfaceinheritance
;
opt_interfaceinheritance
: EXTENDS extendsnames
| %empty
;
extendsnames
: extendsnames ',' extendsname
| extendsname
;
simplemoduledefinition
: simplemoduleheader '{'
opt_paramblock
opt_gateblock
'}'
;
simplemoduleheader
: SIMPLE NAME
opt_inheritance
;
compoundmoduledefinition
: compoundmoduleheader '{'
opt_paramblock
opt_gateblock
opt_typeblock
opt_submodblock
opt_connblock
'}'
;
compoundmoduleheader
: MODULE NAME
opt_inheritance
;
networkdefinition
: networkheader '{'
opt_paramblock
opt_gateblock
opt_typeblock
opt_submodblock
opt_connblock
'}'
;
networkheader
: NETWORK NAME
opt_inheritance
;
moduleinterfacedefinition
: moduleinterfaceheader '{'
opt_paramblock
opt_gateblock
'}'
;
moduleinterfaceheader
: MODULEINTERFACE NAME
opt_interfaceinheritance
;
opt_paramblock
: opt_params
| PARAMETERS ':'
opt_params
;
opt_params
: params
| %empty
;
params
: params paramsitem
| paramsitem
;
paramsitem
: param
| property
;
param
: param_typenamevalue
| parampattern_value
;
param_typenamevalue
: param_typename opt_inline_properties ';'
| param_typename opt_inline_properties '=' paramvalue opt_inline_properties ';'
;
param_typename
: opt_volatile paramtype NAME
| NAME
;
parampattern_value
: parampattern opt_inline_properties '=' paramvalue ';'
;
paramtype
: DOUBLE
| INT
| STRING
| BOOL
| OBJECT
| XML
;
opt_volatile
: VOLATILE
| %empty
;
paramvalue
: expression
| DEFAULT '(' expression ')'
| DEFAULT
| ASK
;
opt_inline_properties
: inline_properties
| %empty
;
inline_properties
: inline_properties property_namevalue
| property_namevalue
;
parampattern
: pattern
;
pattern
: pattern2 '.' pattern_elem
| pattern2 '.' TYPENAME
;
pattern2
: pattern2 '.' pattern_elem
| pattern_elem
;
pattern_elem
: pattern_name
| pattern_name '[' pattern_index ']'
| pattern_name '[' '*' ']'
| '**'
;
pattern_name
: NAME
| NAME '$' NAME
| CHANNEL
| '{' pattern_index '}'
| '*'
| pattern_name NAME
| pattern_name '{' pattern_index '}'
| pattern_name '*'
;
pattern_index
: INTCONSTANT
| INTCONSTANT '..' INTCONSTANT
| '..' INTCONSTANT
| INTCONSTANT '..'
;
property
: property_namevalue ';'
;
property_namevalue
: property_name
| property_name '(' opt_property_keys ')'
;
property_name
: '@' PROPNAME
| '@' PROPNAME '[' PROPNAME ']'
;
opt_property_keys
: property_keys
;
property_keys
: property_keys ';' property_key
| property_key
;
property_key
: property_literal '=' property_values
| property_values
;
property_values
: property_values ',' property_value
| property_value
;
property_value
: property_literal
| %empty
;
property_literal
: property_literal CHAR
| property_literal STRINGCONSTANT
| CHAR
| STRINGCONSTANT
;
opt_gateblock
: gateblock
| %empty
;
gateblock
: GATES ':'
opt_gates
;
opt_gates
: gates
| %empty
;
gates
: gates gate
| gate
;
gate
: gate_typenamesize
opt_inline_properties ';'
;
gate_typenamesize
: gatetype NAME
| gatetype NAME '[' ']'
| gatetype NAME vector
| NAME
| NAME '[' ']'
| NAME vector
;
gatetype
: INPUT
| OUTPUT
| INOUT
;
opt_typeblock
: typeblock
| %empty
;
typeblock
: TYPES ':'
opt_localtypes
;
opt_localtypes
: localtypes
| %empty
;
localtypes
: localtypes localtype
| localtype
;
localtype
: propertydecl
| channeldefinition
| channelinterfacedefinition
| simplemoduledefinition
| compoundmoduledefinition
| networkdefinition
| moduleinterfacedefinition
| ';'
;
opt_submodblock
: submodblock
| %empty
;
submodblock
: SUBMODULES ':'
opt_submodules
;
opt_submodules
: submodules
| %empty
;
submodules
: submodules submodule
| submodule
;
submodule
: submoduleheader ';'
| submoduleheader '{'
opt_paramblock
opt_gateblock
'}' opt_semicolon
;
submoduleheader
: submodulename ':' dottedname opt_condition
| submodulename ':' likeexpr LIKE dottedname opt_condition
;
submodulename
: NAME
| NAME vector
;
likeexpr
: '<' '>'
| '<' expression '>'
| '<' DEFAULT '(' expression ')' '>'
;
opt_condition
: condition
| %empty
;
opt_connblock
: connblock
| %empty
;
connblock
: CONNECTIONS ALLOWUNCONNECTED ':'
opt_connections
| CONNECTIONS ':'
opt_connections
;
opt_connections
: connections
| %empty
;
connections
: connections connectionsitem
| connectionsitem
;
connectionsitem
: connectiongroup
| connection opt_loops_and_conditions ';'
;
connectiongroup
: opt_loops_and_conditions '{'
connections '}' opt_semicolon
;
opt_loops_and_conditions
: loops_and_conditions
| %empty
;
loops_and_conditions
: loops_and_conditions ',' loop_or_condition
| loop_or_condition
;
loop_or_condition
: loop
| condition
;
loop
: FOR NAME '=' expression '..' expression
;
connection
: leftgatespec '-->' rightgatespec
| leftgatespec '-->' channelspec '-->' rightgatespec
| leftgatespec '<--' rightgatespec
| leftgatespec '<--' channelspec '<--' rightgatespec
| leftgatespec '<-->' rightgatespec
| leftgatespec '<-->' channelspec '<-->' rightgatespec
;
leftgatespec
: leftmod '.' leftgate
| parentleftgate
;
leftmod
: NAME vector
| NAME
;
leftgate
: NAME opt_subgate
| NAME opt_subgate vector
| NAME opt_subgate '++'
;
parentleftgate
: NAME opt_subgate
| NAME opt_subgate vector
| NAME opt_subgate '++'
;
rightgatespec
: rightmod '.' rightgate
| parentrightgate
;
rightmod
: NAME
| NAME vector
;
rightgate
: NAME opt_subgate
| NAME opt_subgate vector
| NAME opt_subgate '++'
;
parentrightgate
: NAME opt_subgate
| NAME opt_subgate vector
| NAME opt_subgate '++'
;
opt_subgate
: '$' NAME
| %empty
;
channelspec
: channelspec_header
| channelspec_header '{'
opt_paramblock
'}'
;
channelspec_header
: opt_channelname
| opt_channelname dottedname
| opt_channelname likeexpr LIKE dottedname
;
opt_channelname
: %empty
| NAME ':'
;
condition
: IF expression
;
vector
: '[' expression ']'
;
expression
: expr
;
expr
: simple_expr
| functioncall
| expr '.' functioncall
| object
| array
| '(' expr ')'
| expr '+' expr
| expr '-' expr
| expr '*' expr
| expr '/' expr
| expr '%' expr
| expr '^' expr
| '-' expr
_
| expr '==' expr
| expr '!=' expr
| expr '>' expr
| expr '>=' expr
| expr '<' expr
| expr '<=' expr
| expr '<=>' expr
| expr '=~' expr
| expr '&&' expr
| expr '||' expr
| expr '##' expr
| '!' expr
_
| expr '&' expr
| expr '|' expr
| expr '#' expr
| '~' expr
_
| expr '<<' expr
| expr '>>' expr
| expr '?' expr ':' expr
;
functioncall
: funcname '(' opt_exprlist ')'
;
array
: '[' ']'
| '[' exprlist ']'
| '[' exprlist ',' ']'
;
object
: '{' opt_keyvaluelist '}'
| NAME '{' opt_keyvaluelist '}'
| NAME '::' NAME '{' opt_keyvaluelist '}'
| NAME '::' NAME '::' NAME '{' opt_keyvaluelist '}'
| NAME '::' NAME '::' NAME '::' NAME '{' opt_keyvaluelist '}'
;
opt_exprlist
: exprlist
| %empty
;
exprlist
: exprlist ',' expr
| expr
;
opt_keyvaluelist
: keyvaluelist
| keyvaluelist ','
| %empty
;
keyvaluelist
: keyvaluelist ',' keyvalue
| keyvalue
;
keyvalue
: key ':' expr
;
key
: STRINGCONSTANT
| NAME
| INTCONSTANT
| REALCONSTANT
| quantity
| '-' INTCONSTANT
| '-' REALCONSTANT
| '-' quantity
| NAN
| INF
| '-' INF
| TRUE
| FALSE
| NULL
| NULLPTR
;
simple_expr
: qname
| operator
| literal
;
funcname
: NAME
| BOOL
| INT
| DOUBLE
| STRING
| OBJECT
| XML
| XMLDOC
;
qname_elem
: NAME
| NAME '[' expr ']'
| THIS
| PARENT
;
qname
: qname '.' qname_elem
| qname_elem
;
operator
: INDEX
| TYPENAME
| qname '.' INDEX
| qname '.' TYPENAME
| EXISTS '(' qname ')'
| SIZEOF '(' qname ')'
;
literal
: stringliteral
| boolliteral
| numliteral
| otherliteral
;
stringliteral
: STRINGCONSTANT
;
boolliteral
: TRUE
| FALSE
;
numliteral
: INTCONSTANT
| realconstant_ext
| quantity
;
otherliteral
: UNDEFINED
| NULLPTR
| NULL
;
quantity
: quantity INTCONSTANT NAME
| quantity realconstant_ext NAME
| INTCONSTANT NAME
| realconstant_ext NAME
;
realconstant_ext
: REALCONSTANT
| INF
| NAN
;
opt_semicolon
: ';'
| %empty
;
21 Appendix C: NED XML Binding¶
This appendix presents the abstract syntax tree (AST) of the NED language and message definitions, in the form of the DTD of the AST's XML representation.
<!ELEMENT ned-file (comment*, (package|import|property-decl|property|
simple-module|compound-module|module-interface|
channel|channel-interface)*)>
<!ATTLIST ned-file
filename CDATA #REQUIRED
version CDATA "2">
<!-- comments and whitespace; comments include '//' marks. Note that although
nearly all elements may contain comment elements, there are places
(e.g. within expressions) where they are ignored by the implementation.
Default value is a space or a newline, depending on the context.
-->
<!ELEMENT comment EMPTY>
<!ATTLIST comment
locid NMTOKEN #REQUIRED
content CDATA #IMPLIED>
<!ELEMENT package (comment*)>
<!ATTLIST package
name CDATA #REQUIRED>
<!ELEMENT import (comment*)>
<!ATTLIST import
import-spec CDATA #REQUIRED>
<!ELEMENT property-decl (comment*, property-key*, property*)>
<!ATTLIST property-decl
name CDATA #REQUIRED
is-array (true|false) "false">
<!ELEMENT extends (comment*)>
<!ATTLIST extends
name CDATA #REQUIRED>
<!ELEMENT interface-name (comment*)>
<!ATTLIST interface-name
name CDATA #REQUIRED>
<!ELEMENT simple-module (comment*, extends?, interface-name*, parameters?, gates?)>
<!ATTLIST simple-module
name NMTOKEN #REQUIRED>
<!ELEMENT module-interface (comment*, extends*, parameters?, gates?)>
<!ATTLIST module-interface
name NMTOKEN #REQUIRED>
<!ELEMENT compound-module (comment*, extends?, interface-name*,
parameters?, gates?, types?, submodules?, connections?)>
<!ATTLIST compound-module
name NMTOKEN #REQUIRED>
<!ELEMENT channel-interface (comment*, extends*, parameters?)>
<!ATTLIST channel-interface
name NMTOKEN #REQUIRED>
<!ELEMENT channel (comment*, extends?, interface-name*, parameters?)>
<!ATTLIST channel
name NMTOKEN #REQUIRED>
<!ELEMENT parameters (comment*, (property|param)*)>
<!ATTLIST parameters
is-implicit (true|false) "false">
<!ELEMENT param (comment*, property*)>
<!ATTLIST param
type (double|int|string|bool|object|xml) #IMPLIED
is-volatile (true|false) "false"
name CDATA #REQUIRED
value CDATA #IMPLIED
is-pattern (true|false) "false"
is-default (true|false) "false">
<!ELEMENT property (comment*, property-key*)>
<!ATTLIST property
is-implicit (true|false) "false"
name CDATA #REQUIRED
index CDATA #IMPLIED>
<!ELEMENT property-key (comment*, literal*)>
<!ATTLIST property-key
name CDATA #IMPLIED>
<!ELEMENT gates (comment*, gate*)>
<!ELEMENT gate (comment*, property*)>
<!ATTLIST gate
name NMTOKEN #REQUIRED
type (input|output|inout) #IMPLIED
is-vector (true|false) "false"
vector-size CDATA #IMPLIED>
<!ELEMENT types (comment*, (channel|channel-interface|simple-module|
compound-module|module-interface)*)>
<!ELEMENT submodules (comment*, submodule*)>
<!ELEMENT submodule (comment*, condition?, parameters?, gates?)>
<!ATTLIST submodule
name NMTOKEN #REQUIRED
type CDATA #IMPLIED
like-type CDATA #IMPLIED
like-expr CDATA #IMPLIED
is-default (true|false) "false"
vector-size CDATA #IMPLIED>
<!ELEMENT connections (comment*, (connection|connection-group)*)>
<!ATTLIST connections
allow-unconnected (true|false) "false">
<!ELEMENT connection (comment*, parameters?, (loop|condition)*)>
<!ATTLIST connection
src-module NMTOKEN #IMPLIED
src-module-index CDATA #IMPLIED
src-gate NMTOKEN #REQUIRED
src-gate-plusplus (true|false) "false"
src-gate-index CDATA #IMPLIED
src-gate-subg (i|o) #IMPLIED
dest-module NMTOKEN #IMPLIED
dest-module-index CDATA #IMPLIED
dest-gate NMTOKEN #REQUIRED
dest-gate-plusplus (true|false) "false"
dest-gate-index CDATA #IMPLIED
dest-gate-subg (i|o) #IMPLIED
name NMTOKEN #IMPLIED
type CDATA #IMPLIED
like-type CDATA #IMPLIED
like-expr CDATA #IMPLIED
is-default (true|false) "false"
is-bidirectional (true|false) "false"
is-forward-arrow (true|false) "true">
<!ELEMENT connection-group (comment*, (loop|condition)*, connection*)>
<!ELEMENT loop (comment*)>
<!ATTLIST loop
param-name NMTOKEN #REQUIRED
from-value CDATA #IMPLIED
to-value CDATA #IMPLIED>
<!ELEMENT condition (comment*)>
<!ATTLIST condition
condition CDATA #IMPLIED>
<!ELEMENT literal (comment*)>
<!-- Note: value is in fact REQUIRED, but empty attr value should
also be accepted because that represents the "" string literal;
"spec" is for properties, to store the null value and "-",
the antivalue.
-->
<!ATTLIST literal
type (double|quantity|int|bool|string|spec) #REQUIRED
text CDATA #IMPLIED
value CDATA #IMPLIED>
<!--
** 'unknown' is used internally to represent elements not in this NED DTD
-->
<!ELEMENT unknown ANY>
<!ATTLIST unknown
element CDATA #REQUIRED>
22 Appendix D: NED Functions¶
The functions that can be used in NED expressions and ini files are as follows. The question mark (as in “rng?”) denotes optional arguments.
22.1 Category "conversion":¶
- bool : bool bool(any x)
Converts x to bool, and returns the result. For numeric values, 0 and nan become false and other values become true; for strings, "true" becomes true and everything else becomes false. - double : quantity double(any x)
Converts x to double, and returns the result. A boolean argument becomes 0 or 1; a string is interpreted as number; an object argument causes an error. Units are preserved. - int : intquantity int(any x)
Converts x to int, and returns the result. A boolean argument becomes 0 or 1; a double is converted using floor(); a string is interpreted as number; an object argument causes an error. Units are preserved. - string : string string(any x)
Converts x to string, and returns the result.
22.2 Category "i/o":¶
- absFilePath : string absFilePath(string filename)
Converts filename to an absolute filesystem path. Absolute paths are returned unchanged; relative paths are understood as relative to the location of the ini or NED file where the call occurs (see baseDir()). - baseDir : string baseDir()
Returns the absolute filesystem path to the directory of the ini or NED file where the baseDir() call occurs. - parseCSV : any parseCSV(string str)
Parses the given string as a comma-separated CSV, and returns it as an array of arrays. Elements can be boolean (true/false), numeric (integer or double, with or without measurement unit), quoted string, or unquoted string. Items that cannot be parsed as any of the more specific types are interpreted as unquoted strings. See readCSV() for details of the accepted CSV flavor. - parseExtendedCSV : any parseExtendedCSV(string str)
Parses the given string as a comma-separated CSV, and returns it as an array of arrays. Elements are parsed as NED expressions, and are evaluated in the caller's context. See readCSV() for details of the accepted CSV flavor. - parseExtendedJSON : any parseExtendedJSON(string str)
Parses the given string as Extended JSON, and returns its contents. Extended JSON allows any value to be a valid NED expression (instead of just constants allowed by strict JSON), and some extensions to the object syntax. Actually, as the NED expression syntax includes JSON-like arrays and objects, "parsing" is done simply by evaluating the string as a NED expression in the caller's context. - parseJSON : any parseJSON(string str)
Parses the given string as JSON, and returns its contents. The syntax is more permissive than standard JSON: it additionally allows the special numeric values `nan`, `inf` and `-inf`, the use of measurement units, and object keys are also accepted without quotation marks if it doesn't interfere with parsing. - parseXML : xml parseXML(string xmlstring, string xpath?)
Parses the given XML string into a cXMLElement tree, and returns the root element. When called with two arguments, it returns the first element from the tree that matches the expression given in simplified XPath syntax. - readCSV : any readCSV(string filename)
Parses the content of the given text file as comma-separated CSV, and returns it as an array of arrays. Elements can be boolean (`true` or `false`), numeric (integer or double, with or without measurement unit), quoted string, or unquoted string. Items that cannot be parsed as any of the more specific types are interpreted as unquoted strings. CSV parsing rules: separator is comma; blank (whitespace-only) lines are ignored; lines that contain hash mark `#` on column 1 are considered comments and are ignored; items are trimmed of leading and trailing whitespace before processing; no line continuation with backslash; quoted strings may be delimited with single or double quotes; quoted strings may contain C-like backslash escapes; no support for splitting strings over multiple lines; no special treatment for the first (possibly header) line. - readExtendedCSV : any readExtendedCSV(string filename)
Parses the content of the given text file as comma-separated CSV, and returns it as an array of arrays. Elements are parsed as NED expressions, and are evaluated in the caller's context. See readCSV() for details of the accepted CSV flavor. - readExtendedJSON : any readExtendedJSON(string filename)
Parses the given text file as Extended JSON, and returns its contents. Extended JSON allows any value to be a valid NED expression (instead of just constants allowed by strict JSON), and some extensions to the object syntax. Actually, as the NED expression syntax includes JSON-like arrays and objects, "parsing" is done simply by evaluating the content as a NED expression in the caller's context. - readFile : string readFile(string filename)
Opens the specified text file, and returns its content as a string. If filename is a relative path, it is understood as relative to the location of the ini or NED file where the readFile() call occurs. - readJSON : any readJSON(string filename)
Parses the given text file as JSON, and returns its contents. The syntax is more permissive than standard JSON: it additionally allows the special numeric values `nan`, `inf` and `-inf`, the use of measurement units, and object keys are also accepted without quotation marks if it doesn't interfere with parsing. - readXML : xml readXML(string filename, string xpath?)
Parses the given XML file into a cXMLElement tree, and returns the root element. When called with two arguments, it returns the first element from the tree that matches the expression given in simplified XPath syntax. - resolveFile : string resolveFile(string directory, string filename)
Joins that arguments as file paths, except that when the second argument is an absolute filesystem path, it is returned unchanged. This is purely a string operation; neither directory nor filename needs to exist in the file system. - workingDir : string workingDir()
Returns the current working directory.
22.3 Category "math":¶
- acos : double acos(double)
Trigonometric function; see the standard C function of the same name. - asin : double asin(double)
Trigonometric function; see the standard C function of the same name. - atan : double atan(double)
Trigonometric function; see the standard C function of the same name. - atan2 : double atan2(double, double)
Trigonometric function; see the standard C function of the same name. - ceil : double ceil(double)
Rounds up; see the standard C function of the same name. - cos : double cos(double)
Trigonometric function; see the standard C function of the same name. - exp : double exp(double)
Exponential; see the standard C function of the same name. - fabs : quantity fabs(quantity x)
Returns the absolute value of the quantity. - floor : double floor(double)
Rounds down; see the standard C function of the same name. - fmod : quantity fmod(quantity x, quantity y)
Returns the floating-point remainder of x/y; unit conversion takes place if needed. - hypot : double hypot(double, double)
Length of the hypotenuse; see the standard C function of the same name. - log : double log(double)
Natural logarithm; see the standard C function of the same name. - log10 : double log10(double)
Base-10 logarithm; see the standard C function of the same name. - max : quantity max(quantity a, quantity b)
Returns the greater one of the two quantities; unit conversion takes place if needed. - min : quantity min(quantity a, quantity b)
Returns the smaller one of the two quantities; unit conversion takes place if needed. - pow : double pow(double, double)
Power; see the standard C function of the same name. - sin : double sin(double)
Trigonometric function; see the standard C function of the same name. - sqrt : double sqrt(double)
Square root; see the standard C function of the same name. - tan : double tan(double)
Trigonometric function; see the standard C function of the same name.
22.4 Category "misc":¶
- dup : object dup(object obj)
Clones the given object by invoking its dup() C++ method. - eval : any eval(string expr)
Evaluates the NED expression within the calling context. - firstAvailable : string firstAvailable(...)
Accepts any number of strings, interprets them as NED type names (qualified or unqualified), and returns the first one that exists and its C++ implementation class is also available. Throws an error if none of the types are available. - get : any get(object arrayOrMap, any keyOrIndex)
Retrieves a value from a NED map or array. Examples: get([10,20,30], 1) returns 20; get(foo:10,bar:20, 'foo') returns 10. Note that get(x,i) may also be written as x.get(i), with the two being completely equivalent. - select : any select(int index, ...)
Returns the <index>th item from the rest of the argument list; numbering starts from 0. - simTime : quantity simTime()
Returns the current simulation time. - size : int size(object arrayOrMap)
Returns the length of an array, or the number of elements in a map.
22.5 Category "ned":¶
- ancestorIndex : int ancestorIndex(int numLevels)
Returns the index of the ancestor module numLevels levels above the module or channel in context. - componentId : int componentId()
Returns the ID of the module or channel in context. - fullName : string fullName()
Returns the full name of the module or channel in context. - fullPath : string fullPath()
Returns the full path of the module or channel in context. - parentIndex : int parentIndex()
Returns the index of the parent module, which has to be part of module vector.
22.6 Category "random/continuous":¶
- beta : double beta(double alpha1, double alpha2, int rng?)
Returns a random number from the Beta distribution. - cauchy : quantity cauchy(quantity a, quantity b, int rng?)
Returns a random number from the Cauchy distribution. - chi_square : double chi_square(int k, int rng?)
Returns a random number from the Chi-square distribution. - erlang_k : quantity erlang_k(int k, quantity mean, int rng?)
Returns a random number from the Erlang distribution. - exponential : quantity exponential(quantity mean, int rng?)
Returns a random number from the Exponential distribution. - gamma_d : quantity gamma_d(double alpha, quantity theta, int rng?)
Returns a random number from the Gamma distribution. - lognormal : double lognormal(double m, double w, int rng?)
Returns a random number from the Lognormal distribution. - normal : quantity normal(quantity mean, quantity stddev, int rng?)
Returns a random number from the Normal distribution. - pareto_shifted : quantity pareto_shifted(double a, quantity b, quantity c, int rng?)
Returns a random number from the Pareto-shifted distribution. - student_t : double student_t(int i, int rng?)
Returns a random number from the Student-t distribution. - triang : quantity triang(quantity a, quantity b, quantity c, int rng?)
Returns a random number from the Triangular distribution. - truncnormal : quantity truncnormal(quantity mean, quantity stddev, int rng?)
Returns a random number from the truncated Normal distribution. - uniform : quantity uniform(quantity a, quantity b, int rng?)
Returns a random number from the Uniform distribution. - weibull : quantity weibull(quantity a, quantity b, int rng?)
Returns a random number from the Weibull distribution.
22.7 Category "random/discrete":¶
- bernoulli : int bernoulli(double p, int rng?)
Returns a random number from the Bernoulli distribution. - binomial : int binomial(int n, double p, int rng?)
Returns a random number from the Binomial distribution. - geometric : int geometric(double p, int rng?)
Returns a random number from the Geometric distribution. - intuniform : int intuniform(intquantity a, intquantity b, int rng?)
Returns a random integer uniformly distributed over [a,b]. - intuniformexcl : int intuniformexcl(intquantity a, intquantity b, int rng?)
Returns a random integer uniformly distributed over [a,b), that is, [a,b-1]. - negbinomial : int negbinomial(int n, double p, int rng?)
Returns a random number from the Negative Binomial distribution. - poisson : int poisson(double lambda, int rng?)
Returns a random number from the Poisson distribution.
22.8 Category "strings":¶
- choose : string choose(int index, string list)
Interprets list as a space-separated list, and returns the item at the given index. Negative and out-of-bounds indices cause an error. - contains : bool contains(string s, string substr)
Returns true if string s contains substr as substring - endsWith : bool endsWith(string s, string substr)
Returns true if s ends with the substring substr. - expand : string expand(string s)
Expands $ variables ($configname, $runnumber, etc.) in the given string, and returns the result. - indexOf : int indexOf(string s, string substr)
Returns the position of the first occurrence of the substring substr in s, or -1 if s does not contain substr. - length : int length(string s)
Returns the length of the string - replace : string replace(string s, string substr, string repl, int startPos?)
Replaces all occurrences of substr in s with the string repl. If startPos is given, search begins from position startPos in s. - replaceFirst : string replaceFirst(string s, string substr, string repl, int startPos?)
Replaces the first occurrence of substr in s with the string repl. If startPos is given, search begins from position startPos in s. - startsWith : bool startsWith(string s, string substr)
Returns true if s begins with the substring substr. - substring : string substring(string s, int pos, int len?)
Return the substring of s starting at the given position, either to the end of the string or maximum len characters - substringAfter : string substringAfter(string s, string substr)
Returns the substring of s after the first occurrence of substr, or the empty string if s does not contain substr. - substringAfterLast : string substringAfterLast(string s, string substr)
Returns the substring of s after the last occurrence of substr, or the empty string if s does not contain substr. - substringBefore : string substringBefore(string s, string substr)
Returns the substring of s before the first occurrence of substr, or the empty string if s does not contain substr. - substringBeforeLast : string substringBeforeLast(string s, string substr)
Returns the substring of s before the last occurrence of substr, or the empty string if s does not contain substr. - tail : string tail(string s, int len)
Returns the last len character of s, or the full s if it is shorter than len characters. - toLower : string toLower(string s)
Converts s to all lowercase, and returns the result. - toUpper : string toUpper(string s)
Converts s to all uppercase, and returns the result. - trim : string trim(string s)
Discards whitespace from the start and end of s, and returns the result.
22.9 Category "units":¶
- convertUnit : quantity convertUnit(quantity x, string unit)
Converts x to the given unit. - dropUnit : double dropUnit(quantity x)
Removes the unit of measurement from quantity x. - replaceUnit : quantity replaceUnit(quantity x, string unit)
Replaces the unit of x with the given unit. - unitOf : string unitOf(quantity x)
Returns the unit of the given quantity.
22.10 Category "xml":¶
- xml : xml xml(string xmlstring, string xpath?)
Parses the given XML string into a cXMLElement tree, and returns the root element. When called with two arguments, it returns the first element from the tree that matches the expression given in simplified XPath syntax. Note: This is an alias for the parseXML() function. - xmldoc : xml xmldoc(string filename, string xpath?)
Parses the given XML file into a cXMLElement tree, and returns the root element. When called with two arguments, it returns the first element from the tree that matches the expression given in simplified XPath syntax. Note: This is an alias for the readXML() function.
22.11 Category "units/conversion":¶
- <unit_name> : quantity <unit_name>(quantity x)
All measurement unit names can be used as one-argument functions that convert from a compatible unit or a dimensionless number. Substitute underscore for any hyphen in the name, and '_per_' for any slash: milliampere-hour --> milliampere_hour(), meter/sec --> meter_per_sec().d(), day(), h(), hour(), min(), minute(), s(), second(), ms(), millisecond(), us(), microsecond(), ns(), nanosecond(), ps(), picosecond(), fs(), femtosecond(), as(), attosecond(), bps(), bit_per_sec(), kbps(), kilobit_per_sec(), Mbps(), megabit_per_sec(), Gbps(), gigabit_per_sec(), Tbps(), terabit_per_sec(), B(), byte(), KiB(), kibibyte(), MiB(), mebibyte(), GiB(), gibibyte(), TiB(), tebibyte(), kB(), kilobyte(), MB(), megabyte(), GB(), gigabyte(), TB(), terabyte(), b(), bit(), Kib(), kibibit(), Mib(), mebibit(), Gib(), gibibit(), Tib(), tebibit(), kb(), kilobit(), Mb(), megabit(), Gb(), gigabit(), Tb(), terabit(), rad(), radian(), deg(), degree(), m(), meter(), dm(), decimeter(), cm(), centimeter(), mm(), millimeter(), um(), micrometer(), nm(), nanometer(), km(), kilometer(), W(), watt(), mW(), milliwatt(), uW(), microwatt(), nW(), nanowatt(), pW(), picowatt(), fW(), femtowatt(), kW(), kilowatt(), MW(), megawatt(), GW(), gigawatt(), Hz(), hertz(), kHz(), kilohertz(), MHz(), megahertz(), GHz(), gigahertz(), THz(), terahertz(), kg(), kilogram(), g(), gram(), t(), tonne(), K(), kelvin(), J(), joule(), kJ(), kilojoule(), MJ(), megajoule(), Ws(), watt_second(), Wh(), watt_hour(), kWh(), kilowatt_hour(), MWh(), megawatt_hour(), V(), volt(), kV(), kilovolt(), mV(), millivolt(), A(), ampere(), mA(), milliampere(), uA(), microampere(), Ohm(), ohm(), mOhm(), milliohm(), kOhm(), kiloohm(), MOhm(), megaohm(), mps(), meter_per_sec(), kmps(), kilometer_per_sec(), kmph(), kilometer_per_hour(), C(), coulomb(), As(), ampere_second(), mAs(), milliampere_second(), Ah(), ampere_hour(), mAh(), milliampere_hour(), x(), times(), dBW(), decibel_watt(), dBm(), decibel_milliwatt(), dBmW(), decibel_milliwatt(), dBV(), decibel_volt(), dBmV(), decibel_millivolt(), dBA(), decibel_ampere(), dBmA(), decibel_milliampere(), dB(), decibel(), etc.
23 Appendix E: Message Definitions Grammar¶
This appendix contains the grammar for the message definitions language.
In the language, space, horizontal tab and new line characters count as delimiters, so one or more of them is required between two elements of the description which would otherwise be unseparable.
The // symbol initiates comments that extend to the end of the line.
The language is case sensitive.
Notation:
- rule syntax is that of bison
- uppercase words are terminals, lowercase words are nonterminals
- NAME, CHARCONSTANT, STRINGCONSTANT, INTCONSTANT, REALCONSTANT represent identifier names and string, character, integer and real number literals (defined as in the C language)
- other terminals represent keywords in all lowercase
Nonterminals ending in _old are present so that message files from OMNeT++ (3.x) can be parsed.
msgfile
: definitions
;
definitions
: definitions definition
| %empty
;
definition
: namespace_decl
| fileproperty
| cplusplus
| import
| struct_decl
| class_decl
| message_decl
| packet_decl
| enum_decl
| enum
| message
| packet
| class
| struct
;
namespace_decl
: NAMESPACE qname ';'
| NAMESPACE ';'
qname
: '::' qname1
| qname1
;
qname1
: qname1 '::' NAME
| NAME
;
fileproperty
: property_namevalue ';'
;
cplusplus
: CPLUSPLUS '{{' ... '}}' opt_semicolon
| CPLUSPLUS '(' targetspec ')' '{{' ... '}}' opt_semicolon
;
;
targetspec
: targetspec targetitem
| targetitem
;
targetitem
: NAME | '::' | INTCONSTANT | ':' | '.' | ',' | '~' | '=' | '&'
;
import
: IMPORT importspec ';'
;
importspec
: importspec '.' importname
| importname
;
importname
: NAME
| MESSAGE | PACKET | CLASS | STRUCT | ENUM | ABSTRACT
;
struct_decl
: STRUCT qname ';'
;
class_decl
: CLASS qname ';'
| CLASS NONCOBJECT qname ';'
| CLASS qname EXTENDS qname ';'
;
message_decl
: MESSAGE qname ';'
;
packet_decl
: PACKET qname ';'
;
enum_decl
: ENUM qname ';'
;
enum
: ENUM qname '{'
opt_enumfields_and_properties '}' opt_semicolon
;
opt_enumfields_and_properties
: enumfields_and_properties
| %empty
;
enumfields_and_properties
: enumfields_and_properties enumfield
| enumfields_and_properties property
| enumfield
| property
;
enumfield
: NAME ';'
| NAME '=' enumvalue ';'
;
message
: message_header body
;
packet
: packet_header body
;
class
: class_header body
;
struct
: struct_header body
;
message_header
: MESSAGE qname '{'
| MESSAGE qname EXTENDS qname '{'
;
packet_header
: PACKET qname '{'
| PACKET qname EXTENDS qname '{'
;
class_header
: CLASS qname '{'
| CLASS qname EXTENDS qname '{'
;
struct_header
: STRUCT qname '{'
| STRUCT qname EXTENDS qname '{'
;
body
: opt_fields_and_properties
'}' opt_semicolon
;
opt_fields_and_properties
: fields_and_properties
| %empty
;
fields_and_properties
: fields_and_properties field
| fields_and_properties property
| field
| property
;
field
: fieldtypename opt_fieldvector opt_inline_properties ';'
| fieldtypename opt_fieldvector opt_inline_properties '=' fieldvalue opt_inline_properties ';'
;
fieldtypename
: fieldmodifiers fielddatatype NAME
| fieldmodifiers NAME
;
fieldmodifiers
: ABSTRACT
| %empty
;
fielddatatype
: fieldsimpledatatype
| fieldsimpledatatype '*'
| CONST fieldsimpledatatype
| CONST fieldsimpledatatype '*'
;
fieldsimpledatatype
: qname
| CHAR
| SHORT
| INT
| LONG
| UNSIGNED CHAR
| UNSIGNED SHORT
| UNSIGNED INT
| UNSIGNED LONG
| DOUBLE
| STRING
| BOOL
;
opt_fieldvector
: '[' INTCONSTANT ']'
| '[' qname ']'
| '[' ']'
| %empty
;
fieldvalue
: fieldvalue fieldvalueitem
| fieldvalueitem
;
fieldvalueitem
: STRINGCONSTANT
| CHARCONSTANT
| INTCONSTANT
| REALCONSTANT
| TRUE
| FALSE
| NAME
| '::'
| '?' | ':' | '&&' | '||' | '##' | '==' | '!=' | '>' | '>=' | '<' | '<='
| '&' | '|' | '#' | '<<' | '>>'
| '+' | '-' | '*' | '/' | '%' | '^' | UMIN | '!' | '~'
| '.' | ',' | '(' | ')' | '[' | ']'
;
enumvalue
: INTCONSTANT
| '-' INTCONSTANT
| NAME
;
opt_inline_properties
: inline_properties
| %empty
;
inline_properties
: inline_properties property_namevalue
| property_namevalue
;
property
: property_namevalue ';'
;
property_namevalue
: property_name
| property_name '(' opt_property_keys ')'
| ENUM '(' NAME ')'
;
property_name
: '@' PROPNAME
| '@' PROPNAME '[' PROPNAME ']'
;
opt_property_keys
: property_keys
;
property_keys
: property_keys ';' property_key
| property_key
;
property_key
: property_literal '=' property_values
| property_values
;
property_values
: property_values ',' property_value
| property_value
;
property_value
: property_literal
| %empty
;
property_literal
: property_literal CHAR
| property_literal STRINGCONSTANT
| CHAR
| STRINGCONSTANT
;
opt_semicolon
: ';'
| %empty
;
24 Appendix F: Message Class/Field Properties¶
This appendix lists the properties that can be used to customize C++ code generated from message descriptions.
- @abstract (type: bool, use: field, class)
If true: For a class, it indicates that it is an abstract class in the C++ sense (one which cannot be instantiated). For a field, it requests that the accessor methods for the field be made pure virtual and no data member be generated; it also makes the class that contains the field abstract (unless the class has @customize whereas it is assumed that the custom code implements the pure virtual member functions). - @allowReplace (type: bool, use: field)
Specifies whether the setter method of an owned pointer field is allowed to delete the previously set object. - @appender (type: string, use: field)
Name of the appender method. (This method appends an element to a dynamic array.) When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @argType (type: string, use: field, class)
Field setter argument C++ base type. This type may be decorated with 'const' and '*'/'&' to produce the actual argument type. When specified on a class, it determines the default for fields of that type. - @baseType (type: string, use: enum)
Specifies the underlying data type for the enum. - @beforeChange (type: string, use: class)
Method to be called before mutator code (in setters, non-const getters, operator=, etc.). - @byValue (type: bool, use: field, class)
If true: Causes the value to be passed by value (instead of by reference) in setters/getters. When specified on a class, it determines the default for fields of that type. - @castFunction (type: bool, use: class)
If false: Do not specialize the fromAnyPtr<T>(any_ptr) function for this class. Useful for preventing compile errors if the function already exists, e.g. in hand-written form, or generated for another type (think aliased typedefs). - @class (type: bool, use: enum)
Specifies whether this enum is to be declared as 'enum class'. - @clone (type: string, use: field, class)
For owned pointer fields: Code to duplicate (one array element of) the field value. When specified on a class, it determines the default for fields of that type. - @cppType (type: string, use: field, class)
C++ datatype. Provides a common default for @datamemberType, @argType and @returnType. When specified on a class, it determines the default for fields of that type. - @custom (type: bool, use: field)
If true: Do not generate any data or code for the field, only add it to the descriptor. Indicates that the field's implementation will be added to the class via targeted cplusplus blocks. - @customImpl (type: bool, use: field)
If true: Do not generate implementations for the field's accessor methods, to allow custom implementations to be supplied by the user via cplusplus blocks or in separate .cc files. - @customize (type: bool, use: class)
If true: Customize the class via inheritance. Generates base class <name>_Base. - @datamemberType (type: string, use: field, class)
Data member C++ base data type. This type is decorated with '*' if the field is a pointer. When specified on a class, it determines the default for fields of that type. - @defaultValue (type: string, use: class)
Default value for fields of this type. - @descriptor (type: string, use: class)
A 'true'/'false' value specifies whether to generate descriptor class; special value 'readonly' requests generating a read-only descriptor (but specifying @editable/@replaceable/@resizable on individual fields overrides that). - @editable (type: bool, use: field, class)
Affects descriptor class only. If true: Value of the field (or value of fields that are instances of this type) can be set via the class descriptor's setFieldValueFromString() and setFieldValue() methods. - @enum (type: string, use: field)
For integer fields: Values are from the given enum. - @eraser (type: string, use: field)
Name of the eraser method. (This method erases an element from a dynamic array. Indices above the specified one are shifted down.) When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @eventlog (type: string, use: field)
When @eventlog(skip) is given, eventlog recording will skip this field when serializing objects - @existingClass (type: bool, use: class)
If true: This is a type is already defined in C++, i.e. it does not need to be generated. - @fieldNameSuffix (type: string, use: class)
Suffix to append to the names of data members. - @fromString (type: string, use: field, class)
Affects descriptor class only. Method name, code fragment or funcall template to convert string to field value. When specified on a class, it determines the default for fields of that type. - @fromValue (type: string, use: field, class)
Affects descriptor class only. Method name, code fragment or funcall template to convert cValue to field value. When specified on a class, it determines the default for fields of that type. - @getter (type: string, use: field)
Name of the (const) getter method. When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @getterConversion (type: string, use: field, class)
Method name, code fragment or funcall template to convert field data type to the return type in getters. When specified on a class, it determines the default for fields of that type. - @getterForUpdate (type: string, use: field)
Name of the non-const getter method. When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @group (type: string, use: field)
Used for grouping of fields in Qtenv inspectors - @hint (type: string, use: field)
Short description of the field, displayed in Qtenv inspectors as tooltip - @icon (type: string, use: class)
Icon for objects of this class in Qtenv inspectors - @implements (type: stringlist, use: class)
Names of additional base classes. - @inserter (type: string, use: field)
Name of the inserter method. (This method inserts an element into a dynamic array.) When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @label (type: string, use: field)
When specified, this string will be displayed as field name in Qtenv inspectors - @nopack (type: bool, use: field)
If true: Ignore this field in parsimPack/parsimUnpack methods. - @omitGetVerb (type: bool, use: class)
If true: Drop the 'get' verb from the names of getter methods. - @opaque (type: bool, use: field, class)
Affects descriptor class only. If true: Treat the field as atomic (non-compound) type, i.e. having no descriptor class. When specified on a class, it determines the default for fields of that type. - @overrideGetter (type: bool, use: field)
If true: Add the 'override' keyword to the declaration of the getter method. - @overrideSetter (type: bool, use: field)
If true: Add the 'override' keyword to the declaration of the setter method. - @owned (type: bool, use: field)
For pointers and pointer arrays: Whether allocated memory is owned by the object (needs to be duplicated in dup(), and deleted in destructor). If field type is also a cOwnedObject, take()/drop() calls are also generated. - @packetData (type: string, use: class, field)
Denotes packet data in frameworks such as INET; used in Qtenv inspectors - @polymorphic (type: bool, use: class)
Specifies whether this type is polymorphic, i.e. has any virtual member function. - @primitive (type: bool, use: field, class)
Shortcut for @opaque @byValue @editable @subclassable(false) @supportsPtr(false). - @property (type: any, use: file)
Property for declaring properties. - @readonly (type: bool, use: field)
Affects descriptor class only. Equivalent to @editable(false) @replaceable(false) @resizable(false). - @remover (type: string, use: field)
Name of the remover method. (This method is generated for owned pointer fields. It releases the ownership of the stored object, sets the field to nullptr, then returns the object.) When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @replaceable (type: bool, use: field)
Affects descriptor class only. If true: Field is a pointer whose value can be set via the class descriptor's setFieldStructValuePointer() and setFieldValue() methods. - @resizable (type: bool, use: field)
Affects descriptor class only. If true: Field is a variable-size array whose size can be set via the class descriptor's setFieldArraySize() method. - @returnType (type: string, use: field, class)
Field getter C++ base return type. This type may be decorated with 'const' and '*'/'&' to produce the actual return type. When specified on a class, it determines the default for fields of that type. - @setter (type: string, use: field)
Name of the setter method. When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @sizeGetter (type: string, use: field)
Name of the method that returns the array size. When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @sizeSetter (type: string, use: field)
Name of the method that sets size of dynamic array. When generating a descriptor for an existing class (see @existingClass), a code fragment or funcall template for the equivalent functionality is also accepted. - @sizeType (type: string, use: field)
C++ type to use for array sizes and indices. - @str (type: string, use: class)
Expression to be returned from the generated str() method. - @subclassable (type: bool, use: class)
Specifies whether this type can be subclassed (e.g. C++ primitive types and final classes cannot). - @supportsPtr (type: bool, use: field, class)
Specifies whether this type supports creating a pointer (or pointer array) from it. - @toString (type: string, use: field, class)
Affects descriptor class only. Method name, code fragment or funcall template to convert field value to string. When specified on a class, it determines the default for fields of that type. - @toValue (type: string, use: field, class)
Affects descriptor class only. Method name, code fragment or funcall template to convert field value to cValue. When specified on a class, it determines the default for fields of that type.
25 Appendix G: Display String Tags¶
25.1 Module and Connection Display String Tags¶
Supported module and connection display string tags are listed in the following table.
|
Tag[argument index] - name | Description |
| p[0] - x | X position of the center of the icon/shape; defaults to automatic graph layouting |
| p[1] - y | Y position of the center of the icon/shape; defaults to automatic graph layouting |
| p[2] - arrangement | Arrangement of submodule vectors. Values: row (r), column (c), matrix (m), ring (ri), exact (x) |
| p[3] - arr. par1 | Depends on arrangement: matrix => ncols, ring => rx, exact => dx, row => dx, column => dy |
| p[4] - arr. par2 | Depends on arrangement: matrix => dx, ring => ry, exact => dy |
| p[5] - arr. par3 | Depends on arrangement: matrix => dy |
| g[5] - layout group | Allows unrelated modules to be arranged in a row, column, matrix, etc |
| b[0] - width | Width of object. Default: 40 |
| b[1] - height | Height of object. Default: 24 |
| b[2] - shape | Shape of object. Values: rectangle (rect), oval (oval). Default: rect |
| b[3] - fill color | Fill color of the object (color name, #RRGGBB or @HHSSBB). Default: #8080ff |
| b[4] - border color | Border color of the object (color name, #RRGGBB or @HHSSBB). Default: black |
| b[5] - border width | Border width of the object. Default: 2 |
| i[0] - icon | An icon representing the object |
| i[1] - icon tint | A color for tinting the icon (color name, #RRGGBB or @HHSSBB) |
| i[2] - icon tint % | Amount of tinting in percent. Default: 30 |
| is[0] - icon size | The size of the image. Values: very small (vs), small (s), normal (n), large (l), very large (vl) |
| i2[0] - overlay icon | An icon added to the upper right corner of the original image |
| i2[1] - overlay icon tint | A color for tinting the overlay icon (color name, #RRGGBB or @HHSSBB) |
| i2[2] - overlay icon tint % | Amount of tinting in percent. Default: 30 |
| r[0] - range | Radius of the range indicator |
| r[1] - range fill color | Fill color of the range indicator (color name, #RRGGBB or @HHSSBB) |
| r[2] - range border color | Border color of the range indicator (color name, #RRGGBB or @HHSSBB). Default: black |
| r[3] - range border width | Border width of the range indicator. Default: 1 |
| q[0] - queue object | Displays the length of the named queue object |
| t[0] - text | Additional text to display |
| t[1] - text position | Position of the text. Values: left (l), right (r), top (t). Default: t |
| t[2] - text color | Color of the displayed text (color name, #RRGGBB or @HHSSBB). Default: blue |
| tt[0] - tooltip | Tooltip to be displayed over the object |
| bgb[0] - bg width | Width of the module background rectangle |
| bgb[1] - bg height | Height of the module background rectangle |
| bgb[2] - bg fill color | Background fill color (color name, #RRGGBB or @HHSSBB). Default: grey82 |
| bgb[3] - bg border color | Border color of the module background rectangle (color name, #RRGGBB or @HHSSBB). Default: black |
| bgb[4] - bg border width | Border width of the module background rectangle. Default: 2 |
| bgtt[0] - bg tooltip | Tooltip to be displayed over the module's background |
| bgi[0] - bg image | An image to be displayed as a module background |
| bgi[1] - bg image mode | How to arrange the module's background image. Values: fix (f), tile (t), stretch (s), center (c). Default: fixed |
| bgg[0] - grid distance | Distance between two major gridlines, in units |
| bgg[1] - grid subdivision | Minor gridlines per major gridlines. Default: 1 |
| bgg[2] - grid color | Color of the grid lines (color name, #RRGGBB or @HHSSBB). Default: grey |
| bgu[0] - distance unit | Name of distance unit. Default: m |
| m[0] - routing constraint | Connection routing constraint. Values: auto (a), south (s), north (n), east (e), west (w), manual (m) |
| m[1] - src anchor x | When m[0] is 'm', this is the x coordinate of one point of the connection line, in integer percentages of the source rectangle |
| m[2] - src anchor y | When m[0] is 'm', this is the y coordinate of one point of the connection line, in integer percentages of the source rectangle |
| m[3] - dest anchor x | When m[0] is 'm', this is the x coordinate of another point of the connection line, in integer percentages of the destination rectangle |
| m[4] - dest anchor y | When m[0] is 'm', this is the y coordinate of another point of the connection line, in integer percentages of the destination rectangle |
| ls[0] - line color | Connection color (color name, #RRGGBB or @HHSSBB). Default: black |
| ls[1] - line width | Connection line width. Default: 1 |
| ls[2] - line style | Connection line style. Values: solid (s), dotted (d), dashed (da). Default: solid |
25.2 Message Display String Tags¶
To customize the appearance of messages in the graphical runtime environment, override the getDisplayString() method of cMessage or cPacket to return a display string.
| Tag | Meaning |
| b=width,height,oval |
Ellipse with the given height and width.
Defaults: width=10, height=10 |
| b=width,height,rect |
Rectangle with the given height and width.
Defaults: width=10, height=10 |
| o=fillcolor,outlinecolor,borderwidth |
Specifies options for the rectangle or oval.
Colors can be given in HTML format (#rrggbb), in HSB format
(@hhssbb), or as a valid SVG color name.
Defaults: fillcolor=red, outlinecolor=black, borderwidth=1 |
| i=iconname,color,percentage |
Use the named icon. It can be colorized, and the percentage
specifies the amount of colorization. If the color name is "kind",
a message kind dependent color is used (like default behavior).
Defaults: iconname: no default -- if no icon name is present, a small red solid circle will be used; color: no coloring; percentage: 30% |
| tt=tooltip-text | Displays the given text in a tooltip when the user moves the mouse over the message icon. |
26 Appendix H: Figure Definitions¶
This appendix provides a reference for defining figures in NED files.
26.1 Built-in Figure Types¶
The following table lists the figure types supported by OMNeT++.
|
@figure type | C++ class |
| line | cLineFigure |
| arc | cArcFigure |
| polyline | cPolylineFigure |
| rectangle | cRectangleFigure |
| oval | cOvalFigure |
| ring | cRingFigure |
| pieslice | cPieSliceFigure |
| polygon | cPolygonFigure |
| path | cPathFigure |
| text | cTextFigure |
| label | cLabelFigure |
| image | cImageFigure |
| icon | cIconFigure |
| pixmap | cPixmapFigure |
| group | cGroupFigure |
Additional figure types can be defined with the custom:<type> syntax; see the FigureType below.
26.2 Attribute Types¶
This section lists the available attribute types and their value syntaxes.
- bool :
true or false. - int :
An integer. - double :
A real number. - double01 :
A real number in the interval [0,1]. - degrees :
A real number that will be interpreted as degrees. - string :
A string. It only needs to be enclosed in quotes if it contains a comma, a semicolon, an unmatched close parenthesis, or any other character that prevents it from being properly parsed as a property value. - Anchor :
c, center, n, e, s, w, nw, ne, se, sw, start, middle, or end. The last three are only valid for text figures. - Arrowhead :
none, simple, triangle, or barbed. - CapStyle :
butt, square, or round. - Color :
A color in HTML format (#rrggbb), a color in HSB format (@hhssbb), or a valid SVG color name. - Dimensions : width, height
Size given as width and height. - FigureType :
One of the built-in figure types (e.g. line or arc, see [26.1]), or a figure type registered with Register_Figure(). - FillRule :
evenodd or nonzero. - Font : typeface, size, style
All three items are optional. size is the font size in points. style is a space-separated list of zero or more of the following words: normal, bold, italic, underline. - ImageName :
The name of an image. - Interpolation :
none, fast, or best. - JoinStyle :
bevel, miter, or round. - LineStyle :
solid, dotted, or dashed. - Point : x, y
A point with coordinates (x,y). - Point2 : x1, y1, x2, y2
Two points: (x1,y1) and (x2,y2). - PointList : x1, y1, x2, y2, x3, y3...
A list of points such as (x1,y1), (x2,y2), (x3,y3), etc. - Rectangle : x, y, width, height
A rectangle given by its top-left corner and dimensions. - TagList : tag1, tag2, tag3...
A list of string tags. - Tint : Color, double01
Specifies the tint color and the amount of tinting for images. - Transform :
One or more transform steps. A step can be one of the following:
translate(x, y),
rotate(deg),
rotate(deg, centerx, centery),
scale(s), scale(sx, sy),
scale(s, centerx, centery),
scale(sx, sy, centerx, centery),
skewx(coeff),
skewx(coeff, centery),
skewy(coeff),
skewy(coeff, centerx),
matrix(a, b, c, d, t1, t2)
26.3 Figure Attributes¶
This section lists the attributes accepted by individual figure types. Types enclosed in parentheses are abstract types that cannot be used directly; their sole purpose is to provide a base for more specialized types.
- (figure) :
type=<FigureType>; visible=<bool>; tags=<TagList>; childZ=<int>; transform=<Transform>; - (abstractLine) : figure
lineColor=<Color>; lineStyle=<LineStyle>; lineWidth=<double>; lineOpacity=<double>; capStyle=<CapStyle>; startArrowhead=<Arrowhead>; endArrowhead=<Arrowhead>; zoomLineWidth=<bool>; - line : abstractLine
points=<Point2> - arc : abstractLine
bounds=<Rectangle> pos=<Point>; size=<Dimensions>; anchor=<Anchor>; startAngle=<degrees>; endAngle=<degrees> - polyline : abstractLine
points=<PointList>; smooth=<bool>; joinstyle=<JoinStyle> - (abstractShape) : figure
lineColor=<Color>; fillColor=<Color>; lineStyle=<LineStyle>; lineWidth=<double>; lineOpacity=<double01>; fillOpacity=<double01>; zoomLineWidth=<bool> - rectangle : abstractShape
bounds=<Rectangle> pos=<Point>; size=<Dimensions>; anchor=<Anchor>; cornerRadius=<double>|<Dimensions> - oval : abstractShape
bounds=<Rectangle> pos=<Point>; size=<Dimensions>; anchor=<Anchor> - ring : abstractShape
bounds=<Rectangle> pos=<Point>; size=<Dimensions>; anchor=<Anchor>; innerSize=<Dimensions> - pieslice : abstractShape
bounds=<Rectangle> pos=<Point>; size=<Dimensions>; anchor=<Anchor>; startAngle=<degrees>; endAngle=<degrees> - polygon : abstractShape
points=<PointList>; smooth=<bool>; joinStyle=<JoinStyle>; fillRule=<FillRule> - path : abstractShape
path=<string>; offset=<Point>; joinStyle=<JoinStyle>; capStyle=<CapStyle>; fillRule=<FillRule> - (abstractText) : figure
pos=<Point>; anchor=<Anchor> text=<string>; font=<Font>; opacity=<double01>; color=<Color>; - label : abstractText
angle=<degrees>; - text : abstractText
- (abstractImage) : figure
bounds=<Rectangle> pos=<Point>; size=<Dimensions>; anchor=<Anchor>; interpolation=<Interpolation>; opacity=<double01>; tint=<Tint> - image : abstractImage
image=<ImageName> - icon : abstractImage
image=<ImageName> - pixmap : abstractImage
resolution=<Dimensions>
27 Appendix I: Configuration Options¶
27.1 Configuration Options¶
This section lists all configuration options that are available in ini files. A similar list can be obtained from any simulation executable by running it with the -h configdetails option.- abstract = <bool>, default: false
Per-simulation-run setting.
Declares whether this configuration is an abstract one. Abstract configurations serve as a base for other configurations, and are not meant to be run directly. - allow-object-stealing-on-deletion = <bool>, default: false
Per-simulation-run setting.
Setting it to true disables the "Context component is deleting an object it doesn't own" error message. This option exists primarily for backward compatibility with pre-6.0 versions that were more permissive during object deletion. - **.bin-recording = <bool>, default: true
Per-object setting for scalar results.
Whether the bins of the matching histogram object should be recorded, provided that recording of the histogram object itself is enabled (**.<scalar-name>.scalar-recording=true).
Usage: <module-full-path>.<scalar-name>.bin-recording=true/false. To control histogram recording from a @statistic, use <statistic-name>:histogram for <scalar-name>.
Example: **.ping.roundTripTime:histogram.bin-recording=false - check-signals = <bool>, default: true
Per-simulation-run setting.
Controls whether the simulation kernel will validate signals emitted by modules and channels against signal declarations (@signal properties) in NED files. The default setting depends on the build type: true in DEBUG, and false in RELEASE mode. - cmdenv-autoflush = <bool>, default: false
Per-simulation-run setting.
Call fflush(stdout) after each event banner or status update; affects both express and normal mode. Turning on autoflush may have a performance penalty, but it can be useful with printf-style debugging for tracking down program crashes. - cmdenv-config-name = <string>
Global setting (applies to all simulation runs).
Specifies the name of the configuration to be run (for a value Foo, section [Config Foo] will be used from the ini file). See also cmdenv-runs-to-execute. The -c command line option overrides this setting. - cmdenv-event-banner-details = <bool>, default: false
Per-simulation-run setting.
When cmdenv-express-mode=false: print extra information after event banners. - cmdenv-event-banners = <bool>, default: true
Per-simulation-run setting.
When cmdenv-express-mode=false: turns printing event banners on/off. - cmdenv-express-mode = <bool>, default: true
Per-simulation-run setting.
Selects normal (debug/trace) or express mode. - cmdenv-extra-stack = <double>, unit=B, default: 8KiB
Global setting (applies to all simulation runs).
Specifies the extra amount of stack that is reserved for each activity() simple module when the simulation is run under Cmdenv. - cmdenv-fake-gui = <bool>, default: false
Per-simulation-run setting.
Causes Cmdenv to lie to simulations that is a GUI (isGui()=true), and to periodically invoke refreshDisplay() during simulation execution. - cmdenv-fake-gui-after-event-probability = <double>, default: 1
Per-simulation-run setting.
When cmdenv-fake-gui=true: The probability with which refreshDisplay() is called after each event. - cmdenv-fake-gui-before-event-probability = <double>, default: 1
Per-simulation-run setting.
When cmdenv-fake-gui=true: The probability with which refreshDisplay() is called before each event. - cmdenv-fake-gui-on-hold-numsteps = <custom>, default: 3
Per-simulation-run setting.
When cmdenv-fake-gui=true: The number of times refreshDisplay() is called during a "hold" period (animation during which simulation time does not advance), provided a trial with cmdenv-fake-gui-on-hold-probability yielded success. This an expression which will be evaluated each time, so it can be random. Zero is also a valid value. - cmdenv-fake-gui-on-hold-probability = <double>, default: 0.5
Per-simulation-run setting.
When cmdenv-fake-gui=true: The probability with which refreshDisplay() is called (possibly multiple times, see cmdenv-fake-gui-on-hold-numsteps) during a "hold" period (animation during which simulation time does not advance). - cmdenv-fake-gui-on-simtime-numsteps = <custom>, default: 3
Per-simulation-run setting.
When cmdenv-fake-gui=true: The number of times refreshDisplay() is called when simulation time advances from one simulation event to the next, provided a trial with cmdenv-fake-gui-on-simtime-probability yielded success. This an expression which will be evaluated each time, so it can be random. Zero is also a valid value. - cmdenv-fake-gui-on-simtime-probability = <double>, default: 0.1
Per-simulation-run setting.
When cmdenv-fake-gui=true: The probability with which refreshDisplay() is called (possibly multiple times, see cmdenv-fake-gui-on-simtime-numsteps) when simulation time advances from one simulation event to the next. - cmdenv-fake-gui-seed = <int>, default: 1
Per-simulation-run setting.
When cmdenv-fake-gui=true: The seed for the RNG governing the operation of the fake GUI component. This is entirely independent of the RNGs used by the model. - cmdenv-interactive = <bool>, default: false
Per-simulation-run setting.
Defines what Cmdenv should do when the model contains unassigned parameters. In interactive mode, it asks the user. In non-interactive mode (which is more suitable for batch execution), Cmdenv stops with an error. - cmdenv-log-cleanup = <bool>, default: false
Per-simulation-run setting.
Specifies whether to enable logging during network cleanup. - cmdenv-log-finalization = <bool>
Per-simulation-run setting.
Specifies whether to enable logging during network finalization. The default depends on whether the simulation is run in express mode or not (see cmdenv-express-mode). - cmdenv-log-initialization = <bool>
Per-simulation-run setting.
Specifies whether to enable logging during network initialization. The default depends on whether the simulation is run in express mode or not (see cmdenv-express-mode). - **.cmdenv-log-level = <string>, default: TRACE
Per-object setting for modules.
Specifies the per-component level of detail recorded by log statements, output below the specified level is omitted. Available values are (case insensitive): off, fatal, error, warn, info, detail, debug or trace. Note that the level of detail is also controlled by the globally specified runtime log level and the COMPILETIME_LOGLEVEL macro that is used to completely remove log statements from the executable. - cmdenv-log-prefix = <string>, default: [%l]
Per-simulation-run setting.
Specifies the format string that determines the prefix of each log line. The format string may contain format directives in the syntax %x (a % followed by a single format character). For example %l stands for log level, and %J for source component. See the manual for the list of available format characters. - cmdenv-log-simulation = <bool>
Per-simulation-run setting.
Specifies whether to enable logging during the simulation, i.e. event processing. The default depends on whether the simulation is run in express mode or not (see cmdenv-express-mode). - cmdenv-output-file = <filename>, default: ${resultdir}/${configname}-${iterationvarsf}#${repetition}.out
Per-simulation-run setting.
When cmdenv-record-output=true: file name to redirect standard output to. See also fname-append-host. - cmdenv-performance-display = <bool>, default: true
Per-simulation-run setting.
When cmdenv-express-mode=true: print detailed performance information. Turning it on results in a 3-line entry printed on each update, containing ev/sec, simsec/sec, ev/simsec, number of messages created/still present/currently scheduled in FES. - cmdenv-progress-updates = <bool>, default: true
Per-simulation-run setting.
When cmdenv-express-mode=true: print a periodic status update on the progress of the simulation. - cmdenv-redirect-output = <bool>, default: false
Per-simulation-run setting.
Causes Cmdenv to redirect standard output of simulation runs to a file or separate files per run. This option can be useful with running simulation campaigns (e.g. using opp_runall), and also with parallel simulation. See also: cmdenv-output-file, fname-append-host. - cmdenv-runs-to-execute = <string>
Global setting (applies to all simulation runs).
Specifies which runs to execute from the selected configuration (see cmdenv-config-name option). It accepts a filter expression of iteration variables such as $numHosts>10 && $iatime==1s, or a comma-separated list of run numbers or run number ranges, e.g. 1,3..4,7..9. If the value is missing, Cmdenv executes all runs in the selected configuration. The -r command line option overrides this setting. - cmdenv-status-frequency = <double>, unit=s, default: 2s
Per-simulation-run setting.
When cmdenv-express-mode=true: print status update every n seconds. - cmdenv-stop-batch-on-error = <bool>, default: true
Per-simulation-run setting.
Decides whether Cmdenv should skip the rest of the runs when an error occurs during the execution of one run. - config-recording = <custom>, default: all
Per-simulation-run setting.
Selects the set of config options to save into result files. This option can help reduce the size of result files, which is especially useful in the case of large simulation campaigns. Possible values: all, none, config, params, essentials, globalconfig - configuration-class = <string>
Global setting (applies to all simulation runs).
Part of the Envir plugin mechanism: selects the class from which all configuration information will be obtained. This option lets you replace omnetpp.ini with some other implementation, e.g. database input. The simulation program still has to bootstrap from an omnetpp.ini (which contains the configuration-class setting). The class should implement the cConfigurationEx interface. - constraint = <string>
Per-simulation-run setting.
For scenarios. Contains an expression that iteration variables (${} syntax) must satisfy for that simulation to run. Example: $i < $j+1. - cpu-time-limit = <double>, unit=s
Per-simulation-run setting.
Stops the simulation when CPU usage has reached the given limit. The default is no limit. Note: To reduce per-event overhead, this time limit is only checked every N events (by default, N=1024). - debug-on-errors = <bool>, default: false
Per-simulation-run setting.
When set to true, runtime errors will cause the simulation program to break into the C++ debugger (if the simulation is running under one, or just-in-time debugging is activated). Once in the debugger, you can view the stack trace or examine variables. - debug-statistics-recording = <bool>, default: false
Per-simulation-run setting.
Turns on the printing of debugging information related to statistics recording (@statistic properties) - debugger-attach-command = <string>
Global setting (applies to all simulation runs).
The command line to launch the debugger. It must contain exactly one percent sign, as %u, which will be replaced by the PID of this process. The command must not block (i.e. it should end in & on Unix-like systems). It will be executed by the default system shell (on Windows, usually cmd.exe). Default on this platform: opp_ide omnetpp://dsp/debugger/attach?pid=%u. This default can be overridden with the OMNETPP_DEBUGGER_COMMAND environment variable. - debugger-attach-on-error = <bool>, default: false
Global setting (applies to all simulation runs).
When set to true, runtime errors and crashes will trigger an external debugger to be launched (if not already present), allowing you to perform just-in-time debugging on the simulation process. The debugger command is configurable. Note that debugging (i.e. attaching to) a non-child process needs to be explicitly enabled on some systems, e.g. Ubuntu. - debugger-attach-on-startup = <bool>, default: false
Global setting (applies to all simulation runs).
When set to true, the simulation program will launch an external debugger attached to it (if not already present), allowing you to set breakpoints before proceeding. The debugger command is configurable. Note that debugging (i.e. attaching to) a non-child process needs to be explicitly enabled on some systems, e.g. Ubuntu. - debugger-attach-wait-time = <double>, unit=s, default: 20s
Global setting (applies to all simulation runs).
An interval to wait after launching the external debugger, to give the debugger time to start up and attach to the simulation process. - description = <string>
Per-simulation-run setting.
Descriptive name for the given simulation configuration. Descriptions get displayed in the run selection dialog. - **.display-name = <string>
Per-object setting for modules.
Specifies a display name for the module, which is shown e.g. in Qtenv's graphical module view. - **.display-string = <string>
Per-object setting for modules and channels.
Additional display string for the module/channel; it will be merged into the display string given via @display properties, and override its content. - eventlog-file = <filename>, default: ${resultdir}/${configname}-${iterationvarsf}#${repetition}.elog
Per-simulation-run setting.
Name of the eventlog file to generate. - eventlog-index-frequency = <double>, unit=B, default: 1 MiB
Per-simulation-run setting.
The eventlog file contains incremental snapshots called index. An index is much smaller than a full snapshot, but it only contains the differences since the last index. - eventlog-max-size = <double>, unit=B, default: 10 GiB
Per-simulation-run setting.
Specify the maximum size of the eventlog file in bytes. The eventlog file is automatically truncated when this limit is reached. - eventlog-message-detail-pattern = <custom>
Per-simulation-run setting.
A list of patterns separated by '|' character which will be used to write message detail information into the eventlog for each message sent during the simulation. The message detail will be presented in the sequence chart tool. Each pattern starts with an object pattern optionally followed by ':' character and a comma separated list of field patterns. In both patterns and/or/not/* and various field match expressions can be used. The object pattern matches to class name, the field pattern matches to field name by default.
EVENTLOG-MESSAGE-DETAIL-PATTERN := ( DETAIL-PATTERN '|' )* DETAIL_PATTERN
DETAIL-PATTERN := OBJECT-PATTERN [ ':' FIELD-PATTERNS ]
OBJECT-PATTERN := MATCH-EXPRESSION
FIELD-PATTERNS := ( FIELD-PATTERN ',' )* FIELD_PATTERN
FIELD-PATTERN := MATCH-EXPRESSION
Examples:
*: captures all fields of all messages
*Frame:*Address,*Id: captures all fields named somethingAddress and somethingId from messages of any class named somethingFrame
MyMessage:declaredOn=~MyMessage: captures instances of MyMessage recording the fields declared on the MyMessage class
*:(not declaredOn=~cMessage and not declaredOn=~cNamedObject and not declaredOn=~cObject): records user-defined fields from all messages - eventlog-min-truncated-size = <double>, unit=B, default: 1 GiB
Per-simulation-run setting.
Specify the minimum size of the eventlog file in bytes after the file is truncated. Truncation means older events are discarded while newer ones are kept. - eventlog-options = <custom>
Per-simulation-run setting.
Allows for reducing the size of the eventlog file by recording only specific types of content. Specify a comma-separated subset of the following keywords: text, message, module, methodcall, displaystring and custom. By default, all categories are enabled. - eventlog-recording-intervals = <custom>
Per-simulation-run setting.
Simulation time interval(s) when events should be recorded. Syntax: [<from>]..[<to>],... That is, both start and end of an interval are optional, and intervals are separated by comma. Example: ..10.2, 22.2..100, 233.3.. - eventlog-snapshot-frequency = <double>, unit=B, default: 100 MiB
Per-simulation-run setting.
The eventlog file contains periodically recorded snapshots. Each one describes the complete simulation state at a specific event. Snapshots help various tools to handle large eventlog files more efficiently. Specifying greater value means less help, while smaller value means bigger eventlog files. - eventlogmanager-class = <string>, default: omnetpp::envir::EventlogFileManager
Per-simulation-run setting.
Part of the Envir plugin mechanism: selects the eventlog manager class to be used to record data. The class has to implement the cIEventlogManager interface. - experiment-label = <string>, default: ${configname}
Per-simulation-run setting.
Identifies the simulation experiment (which consists of several, potentially repeated measurements). This string gets recorded into result files, and may be referred to during result analysis. - extends = <string>
Per-simulation-run setting.
Name of the configuration this section is based on. Entries from that section will be inherited and can be overridden. In other words, configuration lookups will fall back to the base section. - fingerprint = <string>
Per-simulation-run setting.
The expected fingerprints of the simulation. If you need multiple fingerprints, separate them with commas. When provided, the fingerprints will be calculated from the specified properties of simulation events, messages, and statistics during execution, and checked against the provided values. Fingerprints are suitable for crude regression tests. As fingerprints occasionally differ across platforms, more than one value can be specified for a single fingerprint, separated by spaces, and a match with any of them will be accepted. To obtain a fingerprint, enter a dummy value (such as 0000), and run the simulation. - fingerprint-events = <string>, default: *
Per-simulation-run setting.
Configures the fingerprint calculator to consider only certain events. The value is a pattern that will be matched against the event name by default. It may also be an expression containing pattern matching characters, field access, and logical operators. The default setting is '*' which includes all events in the calculated fingerprint. If you configured multiple fingerprints, separate filters with commas. - fingerprint-ingredients = <string>, default: tplx
Per-simulation-run setting.
Specifies the list of ingredients to be taken into account for fingerprint computation. Each character corresponds to one ingredient: 'e' event number, 't' simulation time, 'n' message (event) full name, 'c' message (event) class name, 'k' message kind, 'l' message bit length, 'o' message control info class name, 'd' message data, 'i' module id, 'm' module full name, 'p' module full path, 'a' module class name, 'r' random numbers drawn, 's' scalar results, 'z' statistic results, 'v' vector results, 'x' extra data provided by modules. Note: ingredients specified in an expected fingerprint (characters after the '/' in the fingerprint value) take precedence over this setting. If you configured multiple fingerprints, separate ingredients with commas. - fingerprint-modules = <string>, default: *
Per-simulation-run setting.
Configures the fingerprint calculator to consider only certain modules. The value is a pattern that will be matched against the module full path by default. It may also be an expression containing pattern matching characters, field access, and logical operators. The default setting is '*' which includes all events in all modules in the calculated fingerprint. If you configured multiple fingerprints, separate filters with commas. - fingerprint-results = <string>, default: *
Per-simulation-run setting.
Configures the fingerprint calculator to consider only certain results. The value is a pattern that will be matched against the result full path by default. It may also be an expression containing pattern matching characters, field access, and logical operators. The default setting is '*' which includes all results in all modules in the calculated fingerprint. If you configured multiple fingerprints, separate filters with commas. - fingerprintcalculator-class = <string>, default: omnetpp::cSingleFingerprintCalculator
Per-simulation-run setting.
Part of the Envir plugin mechanism: selects the fingerprint calculator class to be used to calculate the simulation fingerprint. The class has to implement the cFingerprintCalculator interface. - fname-append-host = <bool>
Global setting (applies to all simulation runs).
Turning it on will cause the host name and process Id to be appended to the names of output files (e.g. omnetpp.vec, omnetpp.sca). This is especially useful with distributed simulation. The default value is true if parallel simulation is enabled, false otherwise. - futureeventset-class = <string>, default: omnetpp::cEventHeap
Per-simulation-run setting.
Part of the Envir plugin mechanism: selects the class for storing the future events in the simulation. The class has to implement the cFutureEventSet interface. - image-path = <path>, default: ./images
Global setting (applies to all simulation runs).
A semicolon-separated list of directories that contain module icons and other resources. This list will be concatenated with the contents of the OMNETPP_IMAGE_PATH environment variable or with a compile-time, hardcoded image path if the environment variable is empty. - iteration-nesting-order = <string>
Per-simulation-run setting.
Specifies the loop nesting order for iteration variables (${} syntax). The value is a comma-separated list of iteration variables; the list may also contain at most one asterisk. Variables that are not explicitly listed will be inserted at the position of the asterisk, or appended to the list if there is no asterisk. The first variable will become the outermost loop, and the last one the innermost loop. Example: repetition,numHosts,*,iaTime. - load-libs = <filenames>
Global setting (applies to all simulation runs).
A space-separated list of dynamic libraries to be loaded on startup. The libraries should be given without the .dll or .so suffix -- that will be automatically appended. - max-module-nesting = <int>, default: 50
Per-simulation-run setting.
The maximum allowed depth of submodule nesting. This is used to catch accidental infinite recursions in NED. - measurement-label = <string>, default: ${iterationvars}
Per-simulation-run setting.
Identifies the measurement within the experiment. This string gets recorded into result files, and may be referred to during result analysis. - **.module-eventlog-recording = <bool>, default: true
Per-object setting for simple modules.
Enables recording events on a per module basis. This is meaningful for simple modules only. Usage: <module-full-path>.module-eventlog-recording=true/false. Examples: **.router[10..20].**.module-eventlog-recording = true; **.module-eventlog-recording = false - ned-package-exclusions = <custom>
Global setting (applies to all simulation runs).
A semicolon-separated list of NED packages to be excluded when loading NED files. Sub-packages of excluded ones are also excluded. Additional items may be specified via the -x command-line option and the OMNETPP_NED_PACKAGE_EXCLUSIONS environment variable. - ned-path = <path>
Global setting (applies to all simulation runs).
A semicolon-separated list of directories. The directories will be regarded as roots of the NED package hierarchy, and all NED files will be loaded from their subdirectory trees. This option is normally left empty, as the OMNeT++ IDE sets the NED path automatically, and for simulations started outside the IDE it is more convenient to specify it via command-line option (-n) or via environment variable (OMNETPP_NED_PATH, NEDPATH). - network = <string>
Per-simulation-run setting.
The name of the network to be simulated. The package name can be omitted if the ini file is in the same directory as the NED file that contains the network. - num-rngs = <int>, default: 1
Per-simulation-run setting.
The number of random number generators. - output-scalar-db-commit-freq = <int>, default: 100000
Global setting (applies to all simulation runs).
Used with SqliteOutputScalarManager: COMMIT every n INSERTs. - output-scalar-file = <filename>, default: ${resultdir}/${configname}-${iterationvarsf}#${repetition}.sca
Per-simulation-run setting.
Name for the output scalar file. - output-scalar-file-append = <bool>, default: false
Per-simulation-run setting.
What to do when the output scalar file already exists: append to it (OMNeT++ 3.x behavior), or delete it and begin a new file (default). - output-scalar-precision = <int>, default: 14
Per-simulation-run setting.
The number of significant digits for recording data into the output scalar file. The maximum value is ~15 (IEEE double precision). This has no effect on SQLite recording, as it stores values as 8-byte IEEE floating point numbers. - output-vector-db-indexing = <custom>, default: skip
Global setting (applies to all simulation runs).
Whether and when to add an index to the 'vectordata' table in SQLite output vector files. Possible values: skip, ahead, after - output-vector-file = <filename>, default: ${resultdir}/${configname}-${iterationvarsf}#${repetition}.vec
Per-simulation-run setting.
Name for the output vector file. - output-vector-file-append = <bool>, default: false
Per-simulation-run setting.
What to do when the output vector file already exists: append to it, or delete it and begin a new file (default). Note: cIndexedFileOutputVectorManager currently does not support appending. - output-vector-precision = <int>, default: 14
Per-simulation-run setting.
The number of significant digits for recording data into the output vector file. The maximum value is ~15 (IEEE double precision). This setting has no effect on SQLite recording (it stores values as 8-byte IEEE floating point numbers), and for the "time" column which is represented as fixed-point numbers and always get recorded precisely. - output-vectors-memory-limit = <double>, unit=B, default: 16MiB
Per-simulation-run setting.
Total memory that can be used for buffering output vectors. Larger values produce less fragmented vector files (i.e. cause vector data to be grouped into larger chunks), and therefore allow more efficient processing later. There is also a per-vector limit, see **.vector-buffer. - outputscalarmanager-class = <string>, default: omnetpp::envir::OmnetppOutputScalarManager
Per-simulation-run setting.
Part of the Envir plugin mechanism: selects the output scalar manager class to be used to record data passed to recordScalar(). The class has to implement the cIOutputScalarManager interface. - outputvectormanager-class = <string>, default: omnetpp::envir::OmnetppOutputVectorManager
Per-simulation-run setting.
Part of the Envir plugin mechanism: selects the output vector manager class to be used to record data from output vectors. The class has to implement the cIOutputVectorManager interface. - parallel-simulation = <bool>, default: false
Global setting (applies to all simulation runs).
Enables parallel distributed simulation. - **.param-record-as-scalar = <bool>, default: false
Per-object setting for module/channel parameters.
Applicable to module parameters: specifies whether the module parameter should be recorded into the output scalar file. Set it for parameters whose value you will need for result analysis. - **.param-recording = <bool>, default: true
Per-object setting for module/channel parameters.
Whether the matching module (and channel) parameters should be recorded.
Usage: <module-full-path>.<parameter-name>.param-recording=true/false.
Example: **.app.pkLen.param-recording=true - parameter-mutability-check = <bool>, default: true
Per-simulation-run setting.
Setting to false will disable errors raised when trying to change the values of module/channel parameters not marked as @mutable. This is primarily a compatibility setting intended to facilitate running simulation models that were not yet annotated with @mutable. - parsim-communications-class = <string>, default: omnetpp::cFileCommunications
Global setting (applies to all simulation runs).
If parallel-simulation=true, it selects the class that implements communication between partitions. The class must implement the cParsimCommunications interface. - parsim-debug = <bool>, default: true
Global setting (applies to all simulation runs).
With parallel-simulation=true: turns on printing of log messages from the parallel simulation code. - parsim-filecommunications-prefix = <string>, default: comm/
Global setting (applies to all simulation runs).
When cFileCommunications is selected as parsim communications class: specifies the prefix (directory+potential filename prefix) for creating the files for cross-partition messages. - parsim-filecommunications-preserve-read = <bool>, default: false
Global setting (applies to all simulation runs).
When cFileCommunications is selected as parsim communications class: specifies that consumed files should be moved into another directory instead of being deleted. - parsim-filecommunications-read-prefix = <string>, default: comm/read/
Global setting (applies to all simulation runs).
When cFileCommunications is selected as parsim communications class: specifies the prefix (directory) where files will be moved after having been consumed. - parsim-idealsimulationprotocol-tablesize = <int>, default: 100000
Global setting (applies to all simulation runs).
When cIdealSimulationProtocol is selected as parsim synchronization class: specifies the memory buffer size for reading the ISP event trace file. - parsim-mpicommunications-mpibuffer = <int>
Global setting (applies to all simulation runs).
When cMPICommunications is selected as parsim communications class: specifies the size of the MPI communications buffer. The default is to calculate a buffer size based on the number of partitions. - parsim-namedpipecommunications-prefix = <string>, default: comm/
Global setting (applies to all simulation runs).
When cNamedPipeCommunications is selected as parsim communications class: selects the prefix (directory+potential filename prefix) where name pipes are created in the file system. - parsim-nullmessageprotocol-laziness = <double>, default: 0.5
Global setting (applies to all simulation runs).
When cNullMessageProtocol is selected as parsim synchronization class: specifies the laziness of sending null messages. Values in the range [0,1) are accepted. Laziness=0 causes null messages to be sent out immediately as a new EOT is learned, which may result in excessive null message traffic. - parsim-nullmessageprotocol-lookahead-class = <string>, default: cLinkDelayLookahead
Global setting (applies to all simulation runs).
When cNullMessageProtocol is selected as parsim synchronization class: specifies the C++ class that calculates lookahead. The class should subclass from cNMPLookahead. - parsim-num-partitions = <int>
Global setting (applies to all simulation runs).
If parallel-simulation=true, it tells the number of parallel processes to use. This value must be in agreement with the number of simulator instances launched, e.g. with the -n or -np command-line option specified to the mpirun program. - parsim-synchronization-class = <string>, default: omnetpp::cNullMessageProtocol
Global setting (applies to all simulation runs).
If parallel-simulation=true, it selects the parallel simulation algorithm. The class must implement the cParsimSynchronizer interface. - **.partition-id = <string>
Per-object setting for modules.
With parallel simulation: in which partition the module should be instantiated. Specify numeric partition ID, or a comma-separated list of partition IDs for compound modules that span across multiple partitions. Ranges (5..9) and * (=all) are accepted too. - print-instantiated-ned-types = <bool>, default: false
Per-simulation-run setting.
When set to true, the simulation will print the names of all instantiated NED types at the end of the simulation. This is useful for coverage tests. - print-undisposed = <bool>, default: true
Per-simulation-run setting.
Whether to report objects left (that is, not deallocated by simple module destructors) after network cleanup. - print-unused-parameters = <bool>, default: false
Per-simulation-run setting.
When set to true, the simulation will print the names of all parameters that have not been accessed during simulation, i.e. did not have any effect, pointing to possible deficiencies in the model. - qtenv-default-config = <string>
Global setting (applies to all simulation runs).
Specifies which config Qtenv should set up automatically on startup. The default is to ask the user. - qtenv-default-run = <string>
Global setting (applies to all simulation runs).
Specifies which run (of the default config, see qtenv-default-config) Qtenv should set up automatically on startup. A run filter is also accepted. The default is to ask the user. - qtenv-extra-stack = <double>, unit=B, default: 80KiB
Global setting (applies to all simulation runs).
Specifies the extra amount of stack that is reserved for each activity() simple module when the simulation is run under Qtenv. - qtenv-identicon-seed = <string>
Per-simulation-run setting.
Overrides the default (computed) identicon seed for the current run. The identicon is a small image that is shown in the upper right corner of the Qtenv main window, and its purpose is help the user visually identify the window if there are multiple Qtenv simulations running at the same time. The image is generated from a seed. By default, the seed is computed from various properties of the simulation (config name, run number, configuration contents, etc) that ensures that different simulations result in different images, but multiple launches of the same simulation result in the same identicon. This configuration option allows the user to override this default behavior and force a specific seed. - real-time-limit = <double>, unit=s
Per-simulation-run setting.
Stops the simulation after the specified amount of time has elapsed. The default is no limit. Note: To reduce per-event overhead, this time limit is only checked every N events (by default, N=1024). - realtimescheduler-scaling = <double>
Global setting (applies to all simulation runs).
When cRealTimeScheduler is selected as scheduler class: ratio of simulation time to real time. For example, realtimescheduler-scaling=2 will cause simulation time to progress twice as fast as runtime. - record-eventlog = <bool>, default: false
Per-simulation-run setting.
Enables recording an eventlog file, which can be later visualized on a sequence chart. See eventlog-file option too. - record-scalar-results = <bool>, default: true
Per-simulation-run setting.
Enables writing an output scalar (.sca) file. See the output-scalar-file option too. - record-vector-results = <bool>, default: true
Per-simulation-run setting.
Enables writing an output vector (.vec) file. See the output-vector-file option too. - repeat = <int>, default: 1
Per-simulation-run setting.
For scenarios. Specifies how many replications should be done with the same parameters (iteration variables). This is typically used to perform multiple runs with different random number seeds. The loop variable is available as ${repetition}. See also: seed-set key. - replication-label = <string>, default: #${repetition}
Per-simulation-run setting.
Identifies one replication of a measurement (see repeat and measurement-label options as well). This string gets recorded into result files, and may be referred to during result analysis. - result-dir = <string>, default: results
Per-simulation-run setting.
Base value for the ${resultdir} variable, which is used as the default directory for result files (output vector file, output scalar file, eventlog file, etc.). See also the resultdir-subdivision config option. - **.result-recording-modes = <string>, default: default
Per-object setting for statistics (@statistic).
Defines how to calculate results from the matching @statistic.
Usage: <module-full-path>.<statistic-name>.result-recording-modes=<modes>. Special values: default, all: they select the modes listed in the record key of @statistic; all selects all of them, default selects the non-optional ones (i.e. excludes the ones that end in a question mark). Example values: vector, count, last, sum, mean, min, max, timeavg, stats, histogram. More than one values are accepted, separated by commas. Expressions are allowed. Items prefixed with - get removed from the list. Example: **.queueLength.result-recording-modes=default,-vector,+timeavg - resultdir-subdivision = <bool>, default: false
Per-simulation-run setting.
Makes the results directory hierarchical by appending ${iterationvarsd} to the value of the result-dir config option. This is useful if a parameter study produces a large number of runs (>10000), as many file managers and other tools (including the OMNeT++ IDE) struggle with directories containing that many files. An alternative to using this option is to include iteration variables directly in the value of the result-dir option. - **.rng-% = <int>
Per-object setting for modules and channels.
Maps a module-local RNG to one of the global RNGs. Example: **.gen.rng-1=3 maps the local RNG 1 of modules matching **.gen to the global RNG 3. The value may be an expression, with the index and ancestorIndex() operators being potentially very useful. The default is one-to-one mapping, i.e. RNG k of all modules refer to the global RNG k (for k=0..num-rngs-1).
Usage: <module-full-path>.rng-<local-index>=<global-index>. Examples: **.mac.rng-0=1; **.source[*].rng-0=index - rng-class = <string>, default: omnetpp::cMersenneTwister
Per-simulation-run setting.
The random number generator class to be used. It can be cMersenneTwister, cLCG32, cAkaroaRNG, or you can use your own RNG class (it must be subclassed from cRNG). - runnumber-width = <int>, default: 0
Per-simulation-run setting.
Setting a nonzero value will cause the $runnumber variable to get padded with leading zeroes to the given length. - **.scalar-recording = <bool>, default: true
Per-object setting for scalar results.
Whether the matching output scalars and statistic objects should be recorded.
Usage: <module-full-path>.<scalar-name>.scalar-recording=true/false. To enable/disable individual recording modes for a @statistic (those added via the record=... key of @statistic or the **.result-recording-modes=... config option), use <statistic-name>:<mode> for <scalar-name>, and make sure the @statistic as a whole is not disabled with **.<statistic-name>.statistic-recording=false.
Example: **.ping.roundTripTime:stddev.scalar-recording=false - scheduler-class = <string>, default: omnetpp::cSequentialScheduler
Per-simulation-run setting.
Part of the Envir plugin mechanism: selects the scheduler class. This plugin interface allows for implementing real-time, hardware-in-the-loop, distributed and distributed parallel simulation. The class has to implement the cScheduler interface. - sectionbasedconfig-configreader-class = <string>
Global setting (applies to all simulation runs).
When configuration-class=SectionBasedConfiguration: selects the configuration reader C++ class, which must subclass from cConfigurationReader. - seed-%-lcg32 = <int>
Per-simulation-run setting.
When cLCG32 is selected as random number generator: seed for the kth RNG. (Substitute k for '%' in the key.) - seed-%-mt = <int>
Per-simulation-run setting.
When Mersenne Twister is selected as random number generator (default): seed for RNG number k. (Substitute k for '%' in the key.) - seed-%-mt-p% = <int>
Per-simulation-run setting.
With parallel simulation: When Mersenne Twister is selected as random number generator (default): seed for RNG number k in partition number p. (Substitute k for the first '%' in the key, and p for the second.) - seed-set = <int>, default: ${runnumber}
Per-simulation-run setting.
Selects the kth set of automatic random number seeds for the simulation. Meaningful values include ${repetition} which is the repeat loop counter (see repeat option), and ${runnumber}. - sim-time-limit = <double>, unit=s
Per-simulation-run setting.
Stops the simulation when simulation time reaches the given limit. The default is no limit. - simtime-resolution = <custom>, default: ps
Global setting (applies to all simulation runs).
Sets the resolution for the 64-bit fixed-point simulation time representation. Accepted values are: second-or-smaller time units (s, ms, us, ns, ps, fs or as), power-of-ten multiples of such units (e.g. 100ms), and base-10 scale exponents in the -18..0 range. The maximum representable simulation time depends on the resolution. The default is picosecond resolution, which offers a range of ~110 days. - simtime-scale = <int>, default: -12
Global setting (applies to all simulation runs).
DEPRECATED in favor of simtime-resolution. Sets the scale exponent, and thus the resolution of time for the 64-bit fixed-point simulation time representation. Accepted values are -18..0; for example, -6 selects microsecond resolution. -12 means picosecond resolution, with a maximum simtime of ~110 days. - snapshot-file = <filename>, default: ${resultdir}/${configname}-${iterationvarsf}#${repetition}.sna
Per-simulation-run setting.
Name of the snapshot file. - snapshotmanager-class = <string>, default: omnetpp::envir::FileSnapshotManager
Per-simulation-run setting.
Part of the Envir plugin mechanism: selects the class to handle streams to which snapshot() writes its output. The class has to implement the cISnapshotManager interface. - **.statistic-recording = <bool>, default: true
Per-object setting for statistics (@statistic).
Whether the matching @statistic should be recorded. This option lets one completely disable all recording from a @statistic. Disabling a @statistic this way is more efficient than specifying **.scalar-recording=false and **.vector-recording=false together.
Usage: <module-full-path>.<statistic-name>.statistic-recording=true/false.
Example: **.ping.roundTripTime.statistic-recording=false - total-stack = <double>, unit=B
Global setting (applies to all simulation runs).
Specifies the maximum memory for activity() simple module stacks. You need to increase this value if you get a "Cannot allocate coroutine stack" error. - **.typename = <string>
Per-object setting for modules and channels.
Specifies type for submodules and channels declared with 'like <>'. - user-interface = <string>
Global setting (applies to all simulation runs).
Selects the user interface to be started. Known good values are Cmdenv and Qtenv. This option is normally left empty, as it is more convenient to specify the user interface via a command-line option or the IDE's Run and Debug dialogs. New user interfaces can be defined by subclassing cRunnableEnvir. - **.vector-buffer = <double>, unit=B, default: 1MiB
Per-object setting for vector results.
For output vectors: the maximum per-vector buffer space used for storing values before writing them out as a block into the output vector file. There is also a total limit, see output-vectors-memory-limit.
Usage: <module-full-path>.<vector-name>.vector-buffer=<amount>. - **.vector-record-empty = <bool>, default: true
Per-object setting for vector results.
Whether output vectors that have no data recorded into them should appear in the result file. Turning off this option will delay writing the vector declaration into the result file until there is data recorded into the vector. Usage: <module-full-path>.<vector-name>.vector-record-empty=true/false.
Example: **.ping.roundTripTime:vector.vector-record-empty=false - **.vector-record-eventnumbers = <bool>, default: true
Per-object setting for vector results.
Whether to record event numbers for an output vector. (Values and timestamps are always recorded.) Event numbers are needed by the Sequence Chart Tool, for example.
Usage: <module-full-path>.<vector-name>.vector-record-eventnumbers=true/false.
Example: **.ping.roundTripTime:vector.vector-record-eventnumbers=false - **.vector-recording = <bool>, default: true
Per-object setting for vector results.
Whether data written into an output vector should be recorded.
Usage: <module-full-path>.<vector-name>.vector-recording=true/false. To control vector recording from a @statistic, use <statistic-name>:vector for <vector-name>. Example: **.ping.roundTripTime:vector.vector-recording=false - **.vector-recording-intervals = <custom>
Per-object setting for vector results.
Allows one to restrict recording of an output vector to one or more simulation time intervals. Usage: <module-full-path>.<vector-name>.vector-recording-intervals=<intervals>. The syntax for <intervals> is: [<from>]..[<to>],... That is, both start and end of an interval are optional, and intervals are separated by comma.
Example: **.roundTripTime:vector.vector-recording-intervals=..100, 200..400, 900.. - warmup-period = <double>, unit=s
Per-simulation-run setting.
Length of the initial warm-up period. When set, results belonging to the first x seconds of the simulation will not be recorded into output vectors, and will not be counted into output scalars (see option **.result-recording-modes). This option is useful for steady-state simulations. The default is 0s (no warmup period). Note that models that compute and record scalar results manually (via recordScalar()) will not automatically obey this setting. - warnings = <bool>, default: true
Per-simulation-run setting.
Enables warnings.
27.2 Predefined Variables¶
Predefined variables that can be used in config values:
- ${runid} :
A reasonably globally unique identifier for the run, produced by concatenating the configuration name, run number, date/time, etc. - ${inifile} :
Name of the (primary) inifile - ${configname} :
Name of the active configuration - ${runnumber} :
Sequence number of the current run within all runs in the active configuration - ${network} :
Value of the network configuration option - ${experiment} :
Value of the experiment-label configuration option - ${measurement} :
Value of the measurement-label configuration option - ${replication} :
Value of the replication-label configuration option - ${processid} :
PID of the simulation process - ${datetime} :
Date and time the simulation run was started - ${datetimef} :
Like ${datetime}, but sanitized for use as part of a file name - ${resultdir} :
Value of the result-dir configuration option - ${repetition} :
The iteration number in 0..N-1, where N is the value of the repeat configuration option - ${seedset} :
Value of the seed-set configuration option - ${iterationvars} :
Concatenation of all user-defined iteration variables in name=value form - ${iterationvarsf} :
Like ${iterationvars}, but sanitized for use as part of a file name - ${iterationvarsd} :
Like ${iterationvars}, but for use as hierarchical folder name (it contains slashes where ${iterationvarsf} has commas)
28 Appendix J: Result File Formats¶
28.1 Native Result Files¶
The file format described here applies to both output vector and output scalar files. Their formats are consistent, only the types of entries occurring in them are different. This unified format also means that they can be read with a common routine.
Result files are line oriented. A line consists of one or more tokens, separated by whitespace. Tokens either do not contain whitespace, or whitespace is escaped using a backslash, or are quoted using double quotes. Escaping within quotes using backslashes is also permitted.
The first token of a line usually identifies the type of the entry. A notable exception is an output vector data line, which begins with a numeric identifier of the given output vector.
A line starting with # as the first non-whitespace character denotes a comment, and is to be ignored during processing.
Result files are written from simulation runs. A simulation run generates physically contiguous sets of lines into one or more result files. (That is, lines from different runs do not arbitrarily mix in the files.)
A run is identified by a unique textual runId, which appears in all result files written during that run. The runId may appear on the user interface, so it should be somewhat meaningful to the user. Nothing should be assumed about the particular format of runId, but it will be some string concatenated from the simulated network's name, the time/date, the hostname, and other pieces of data to make it unique.
A simulation run will typically write into two result files (.vec and .sca). However, when using parallel distributed simulation, the user will end up with several .vec and .sca files, because different partitions (a separate process each) will write into different files. However, all these files will contain the same runId, so it is possible to relate data that belong together.
Entry types are:
- version: result file version
- run: simulation run identifier
- attr: run, vector, scalar or statistics object attribute
- itervar: iteration variable
- config: configuration entry
- par: module parameter
- scalar: scalar data
- vector: vector declaration
- vector-id: vector data
- file: vector file attributes
- statistic: statistics object
- field: field of a statistics object
- bin: histogram bin
28.1.1 Version¶
Specifies the format of the result file. It is written at the beginning of the file.
Syntax:
version versionNumber
The version described in this document is 3, used since OMNeT++ 6.0.
Version 1 files were produced by OMNeT++ 3.x and earlier, and version 2
files by OMNeT++ 4.x and 5.x.
- [
Differences between version 2 and version 3 files are minimal, and mostly only
affect the run header. Version 3 introduced itervar lines to allow
distinguishing iteration variables from other run attributes (in version 2 they
were all recorded in attr lines). param lines in version 2
(which recorded parameter assignment entries in the configuration) have been
replaced in version 3 with the more general config lines (which record
all configuration entries, not just parameter assignments). In version 2,
parameter values (if requested) were recorded as scalars, whereas in version 3
they are recorded in par lines, which allow recording of volatile
parameters (as expressions) and non-numeric values as well. Additionally,
version 3 doesn't record the fields sum and sqrsum
for weighted statistics.
]
28.1.2 Run Declaration¶
Marks the beginning of a new run in the file. Entries after this line belong to this run.
Syntax:
run runId
Example:
run TokenRing1-0-20080514-18:19:44-3248
Typically there will be one run per file, but this is not mandatory. In cases when there are more than one run in a file and it is not feasible to keep the entire file in memory during analysis, the offsets of the run lines may be indexed for more efficient random access.
The run line may be immediately followed by attribute lines. Attributes may store generic data like the network name, date/time of running the simulation, configuration options that took effect for the simulation, etc.
Run attribute names used by OMNeT++ include the following:
Generic attribute names:
- network: name of the network simulated
- datetime: date/time associated with the run
- processid: the PID of the simulation process
- inifile: the main configuration file
- configname: name of the inifile configuration
- seedset: index of the seed-set use for the simulation
Attributes associated with parameter studies (iterated runs):
- runnumber: the run number within the parameter study
- experiment: experiment label
- measurement: measurement label
- replication: replication label
- repetition: the loop counter for repetitions with different seeds
- iterationvars: string containing the values of the iteration variables
- iterationvarsf: like iterationvars, but sanitized for use as part of file names
An example run header:
run PureAlohaExperiment-0-20200304-18:05:49-194559 attr configname PureAlohaExperiment attr datetime 20200304-18:05:49 attr experiment PureAlohaExperiment attr inifile omnetpp.ini attr iterationvars "$numHosts=10, $iaMean=1" attr measurement "$numHosts=10, $iaMean=1" attr network Aloha attr processid 194559 attr repetition 0 attr replication #0 attr resultdir results attr runnumber 0 attr seedset 0 itervar iaMean 1 itervar numHosts 10 config repeat 2 config sim-time-limit 90min config network Aloha config Aloha.numHosts 10 config Aloha.host[*].iaTime exponential(1s) config Aloha.numHosts 20 config Aloha.txRate 9.6kbps config **.x "uniform(0m, 1000m)" config **.y "uniform(0m, 1000m)" config **.idleAnimationSpeed 1
28.1.3 Attributes¶
Contains an attribute for the preceding run, vector, scalar or statistics object. Attributes can be used for saving arbitrary extra information for objects; processors should ignore unrecognized attributes.
Syntax:
attr name value
Example:
attr network "largeNet"
28.1.4 Iteration Variables¶
Contains an iteration variable for the given run.
Syntax:
itervar name value
Examples:
itervar numHosts 10 itervar tcpType Reno
28.1.5 Configuration Entries¶
The configuration of the simulation is captured in the result file as an ordered list of config lines. The list contains both the contents of ini files and the options given one the command line.
The order of lines represents a flattened view of the ini file(s). The contents of sections are recorded in an order that reflects the section inheritance graph: derived sections precede the sections they extend (so General comes last), and the contents of unrelated sections are omitted. Command like options are at the top. The relative order of lines within ini file sections are preserved. This order corresponds to the search order of entries that contain wildcards (i.e. first match wins).
Values are saved verbatim, except that iteration variables are substituted in them.
Syntax:
config key value
Example config lines:
config sim-time-limit 90min config network Aloha config Aloha.numHosts 10 config Aloha.host[*].iaTime exponential(1s) config **.x "uniform(0m, 1000m)"
28.1.6 Scalar Data¶
Contains an output scalar value.
Syntax:
scalar moduleName scalarName value
Examples:
scalar "net.switchA.relay" "processed frames" 100
Scalar lines may be immediately followed by attribute lines. OMNeT++ uses the following attributes for scalars:
- title: suggested title on charts
- unit: measurement unit, e.g. s for seconds
28.1.7 Vector Declaration¶
Defines an output vector.
Syntax:
vector vectorId moduleName vectorName
vector vectorId moduleName vectorName columnSpec
Where columnSpec is a string, encoding the meaning and ordering the columns of data lines. Characters of the string mean:
- E event number
- T simulation time
- V vector value
Common values are TV and ETV. The default value is TV.
Vector lines may be immediately followed by attribute lines. OMNeT++ uses the following attributes for vectors:
- title: suggested vector title on charts
- unit: measurement unit, e.g. s for seconds
- enum: symbolic names for values of the vector; syntax is "IDLE=0, BUSY=1, OFF=2"
- type: data type, one of int, double and enum
- interpolationmode: hint for interpolation mode on the chart: none (=do not connect the dots), sample-hold, backward-sample-hold, linear
- min: minimum value
- max: maximum value
28.1.8 Vector Data¶
Adds a value to an output vector. This is the same as in older output vector files.
Syntax:
vectorId column1 column2 ...
Simulation times and event numbers within an output vector are required to be in increasing order.
Performance note: Data lines belonging to the same output vector may be written out in clusters (of size roughly a multiple of the disk's physical block size). Then, since an output vector file is typically not kept in memory during analysis, indexing the start offsets of these clusters allows one to read the file and seek in it more efficiently. This does not require any change or extension to the file format.
28.1.9 Index Header¶
The first line of the index file stores the size and modification date of the vector file. If the attributes of a vector file differ from the information stored in the index file, then the IDE automatically rebuilds the index file.
Syntax:
file filesize modificationDate
28.1.10 Index Data¶
Stores the location and statistics of blocks in the vector file.
Syntax:
vectorId offset length firstEventNo lastEventNo firstSimtime lastSimtime count min max sum sqrsum
where
- offset: the start offset of the block
- length: the length of the block
- firstEventNo, lastEventNo: the event number range of the block (optional)
- firstSimtime, lastSimtime: the simtime range of the block
- count, min, max, sum, sqrsum: collected statistics of the values in the block
28.1.11 Statistics Object¶
Represents a statistics object.
Syntax:
statistic moduleName statisticName
Example:
statistic Aloha.server "collision multiplicity"
A statistic line may be followed by field and attribute lines, and a series of bin lines that represent histogram data.
OMNeT++ uses the following attributes:
- title: suggested title on charts
- unit: measurement unit, e.g. s for seconds
- type: type of the collected values: int or double; the default is double
A full example with fields, attributes and histogram bins:
statistic Aloha.server "collision multiplicity" field count 13908 field mean 6.8510209951107 field stddev 5.2385484477843 field sum 95284 field sqrsum 1034434 field min 2 field max 65 attr type int attr unit packets bin -INF 0 bin 0 0 bin 1 0 bin 2 2254 bin 3 2047 bin 4 1586 bin 5 1428 bin 6 1101 bin 7 952 bin 8 785 ... bin 52 2
28.1.12 Field¶
Represents a field in a statistics object.
Syntax:
field fieldName value
Example:
field sum 95284
Fields:
- count: observation count
- mean: mean of the observations
- stddev: standard deviation
- min: minimum of the observations
- max: maximum of the observations
- sum: sum of the observations
- sqrsum: sum of the squared observations
For weighted statistics, sum and sqrsum are replaced by the following fields:
- weights: sum of the weights
- weightedSum: the weighted sum of the observations
- sqrSumWeights: sum of the squared weights
- weightedSqrSum: weighted sum of the squared observations
28.1.13 Histogram Bin¶
Represents a bin in a histogram object.
Syntax:
bin binLowerBound value
Histogram name and module is defined on the statistic line, which is followed by several bin lines to contain data. Any non-bin line marks the end of the histogram data.
The binLowerBound column of bin lines represent the (inclusive) lower bound of the given histogram cell. Bin lines are in increasing binLowerBound order.
The value column of a bin line represents the observation count in the given cell: value k is the number of observations greater or equal to binLowerBound k, but smaller than binLowerBound k+1. Value is not necessarily an integer, because the cKSplit and cPSquare algorithms produce non-integer estimates. The first bin line is the underflow cell, and the last bin line is the overflow cell.
Example:
bin -INF 0 bin 0 4 bin 2 6 bin 4 2 bin 6 1
28.2 SQLite Result Files¶
The database structure in SQLite result files is created with the following SQL statements. Scalar and vector files are identical in structure, they only differ in data.
CREATE TABLE run
(
runId INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,
runName TEXT NOT NULL,
simtimeExp INTEGER NOT NULL
);
CREATE TABLE runAttr
(
runId INTEGER NOT NULL REFERENCES run(runId) ON DELETE CASCADE,
attrName TEXT NOT NULL,
attrValue TEXT NOT NULL
);
CREATE TABLE runItervar
(
runId INTEGER NOT NULL REFERENCES run(runId) ON DELETE CASCADE,
itervarName TEXT NOT NULL,
itervarValue TEXT NOT NULL
);
CREATE TABLE runConfig
(
runId INTEGER NOT NULL REFERENCES run(runId) ON DELETE CASCADE,
configKey TEXT NOT NULL,
configValue TEXT NOT NULL,
configOrder INTEGER NOT NULL
);
CREATE TABLE scalar
(
scalarId INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,
runId INTEGER NOT NULL REFERENCES run(runId) ON DELETE CASCADE,
moduleName TEXT NOT NULL,
scalarName TEXT NOT NULL,
scalarValue REAL -- cannot be NOT NULL, because sqlite converts NaN double value to NULL
);
CREATE TABLE scalarAttr
(
scalarId INTEGER NOT NULL REFERENCES scalar(scalarId) ON DELETE CASCADE,
attrName TEXT NOT NULL,
attrValue TEXT NOT NULL
);
CREATE TABLE parameter
(
paramId INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,
runId INTEGER NOT NULL REFERENCES run(runId) ON DELETE CASCADE,
moduleName TEXT NOT NULL,
paramName TEXT NOT NULL,
paramValue TEXT NOT NULL
);
CREATE TABLE paramAttr
(
paramId INTEGER NOT NULL REFERENCES parameter(paramId) ON DELETE CASCADE,
attrName TEXT NOT NULL,
attrValue TEXT NOT NULL
);
CREATE TABLE statistic
(
statId INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,
runId INTEGER NOT NULL REFERENCES run(runId) ON DELETE CASCADE,
moduleName TEXT NOT NULL,
statName TEXT NOT NULL,
isHistogram INTEGER NOT NULL, -- actually, BOOL
isWeighted INTEGER NOT NULL, -- actually, BOOL
statCount INTEGER NOT NULL,
statMean REAL, -- note: computed; stored for convenience
statStddev REAL, -- note: computed; stored for convenience
statSum REAL,
statSqrsum REAL,
statMin REAL,
statMax REAL,
statWeights REAL, -- note: names of this and subsequent fields are consistent with textual sca file field names
statWeightedSum REAL,
statSqrSumWeights REAL,
statWeightedSqrSum REAL
);
CREATE TABLE statisticAttr
(
statId INTEGER NOT NULL REFERENCES statistic(statId) ON DELETE CASCADE,
attrName TEXT NOT NULL,
attrValue TEXT NOT NULL
);
CREATE TABLE histogramBin
(
statId INTEGER NOT NULL REFERENCES statistic(statId) ON DELETE CASCADE,
lowerEdge REAL NOT NULL,
binValue REAL NOT NULL
);
CREATE TABLE vector
(
vectorId INTEGER PRIMARY KEY AUTOINCREMENT NOT NULL,
runId INTEGER NOT NULL REFERENCES run(runId) ON DELETE CASCADE,
moduleName TEXT NOT NULL,
vectorName TEXT NOT NULL,
vectorCount INTEGER, -- cannot be NOT NULL because we fill it in later
vectorMin REAL,
vectorMax REAL,
vectorSum REAL,
vectorSumSqr REAL,
startEventNum INTEGER,
endEventNum INTEGER,
startSimtimeRaw INTEGER,
endSimtimeRaw INTEGER
);
CREATE TABLE vectorAttr
(
vectorId INTEGER NOT NULL REFERENCES vector(vectorId) ON DELETE CASCADE,
attrName TEXT NOT NULL,
attrValue TEXT NOT NULL
);
CREATE TABLE vectorData
(
vectorId INTEGER NOT NULL REFERENCES vector(vectorId) ON DELETE CASCADE,
eventNumber INTEGER NOT NULL,
simtimeRaw INTEGER NOT NULL,
value REAL -- cannot be NOT NULL because of NaN values
);
Notes:
- To preserve precision, simulation time is stored in raw form, i.e. the underlying int64 is stored as an integer. To get the real value, they have to be multiplied by 10 to the power of the simtime exponent, which is global for the simulation run. The simtime exponent is stored in the simtimeExp column of the run table.
- Some columns like vector statistics are not marked as NOT NULL, because of technical reasons: their values are not available at the time of the insertion, only at the end of the simulation.
- REAL columns are not marked as NOT NULL, because SQLite stores floating-point NaN values as NULLs.
- CAUTION
SQLite support in OMNeT++ is currently experimental, so the above database structure may change in future releases.
29 Appendix K: Eventlog File Format¶
This appendix describes the eventlog file format. Eventlog files, generated by
the simulation when enabled, record all activities during the
simulation,
- [Subject to the granularity specified and filters active
during the simulation.]
The file is structured as a line-oriented text file. Blank lines and lines starting with "#" (indicating comments) are disregarded. Other lines begin with an entry identifier, such as E for Event or BS for BeginSend, followed by attribute-identifier and value pairs. An exception is debug output (captured from EV<<... statements), which starts with a hyphen and is followed by the actual text.
The grammar of the eventlog file is as follows:
<file> ::= <line>*
<line> ::= <empty-line> | <user-log-message> | <event-log-entry>
<empty-line> ::= CR LF
<user-log-message> ::= - SPACE <text> CR LF
<event-log-entry> ::= <event-log-entry-type> SPACE <parameters> CR LF
<event-log-entry-type> ::= SB | SE | BU | MB | ME | MC | MD | MR | GC | GD |
CC | CD | CS | MS | CE | BS | ES | SD | SH | DM | E
<parameters> ::= (<parameter>)*
<parameter> ::= <name> SPACE <value>
<name> ::= <text>
<value> ::= <boolean> | <integer> | <text> | <quoted-text>
The eventlog file must also fulfill the following requirements:
- simulation events are in increasing event number and simulation time order
Here is a fragment of an existing eventlog file as an example:
E # 14 t 1.018454036455 m 8 ce 9 msg 6 BS id 6 tid 6 c cMessage n send/endTx pe 14 ES t 4.840247053855 MS id 8 d t=TRANSMIT,,#808000;i=device/pc_s MS id 8 d t=,,#808000;i=device/pc_s E # 15 t 1.025727827674 m 2 ce 13 msg 25 - another frame arrived while receiving -- collision! CE id 0 pe 12 BS id 0 tid 0 c cMessage n end-reception pe 15 ES t 1.12489449434 BU id 2 txt "Collision! (3 frames)" DM id 25 pe 15
29.1 Supported Entry Types and Their Attributes¶
The following entries and attributes are supported in the eventlog file:
SB (SimulationBegin): mandatory first line of the eventlog file, followed by an empty line
- ov (omnetppVersion, int): OMNeT++ version, e.g. 0x0401 (=1025) is release 4.1
- ev (eventlogVersion, int): eventlog version number
- rid (runId, string): identifies the simulation run
SE (SimulationEnd): optional last non-empty line of the eventlog file, followed by an empty line
- e (isError, bool): specifies if the simulation terminated due to an error
- c (resultCode, int): the error code in case of an error, otherwise the normal result code
- m (message, string): human readable description
E (Event): an event that is processing a message, terminated by an empty line
- # (eventNumber, eventnumber_t): unique event number
- t (simulationTime, simtime_t): simulation time when the event occurred
- m (moduleId, int): id of the processing module
- ce (causeEventNumber, eventnumber_t): event number from which the message being processed was sent, or -1 if the message was sent from initialize
- msg (messageId, msgid_t): id of the message being processed
- f (fingerprints, string): current simulation fingerprints
S (Snapshot): a snapshot of the current simulation state, followed by state entries, and terminated by an emtpy line
- f (fileOffset, int64_t): file offset of this entry
- # (eventNumber, eventnumber_t): event number of the last processed event
- t (simulationTime, simtime_t): simulation time of the last processed event
I (Index): incremental snapshot specifying additional and removed entries with an event number and a line index, followed by an empty line
- f (fileOffset, int64_t): file offset of this entry
- i (previousIndexFileOffset, int64_t): file offset of the previous index entry
- s (previousSnapshotFileOffset, int64_t): file offset of the previous snapshot entry
- # (eventNumber, eventnumber_t): event number of the last processed event
- t (simulationTime, simtime_t): simulation time of the last processed event
abstract (Reference): base class for index entry references
- # (eventNumber, eventnumber_t): event number of the last referred event
- b (beginEntryIndex, int): begin index of the referred entry within the event
- e (endEntryIndex, int): end index of the referred entry within the event
RF (ReferenceFound): specifies an eventlog entry found in the snapshot
- no parameters
RA (ReferenceAdded): specifies an eventlog entry added to the index
- no parameters
RR (ReferenceRemoved): specifies an eventlog entry removed from the index
- no parameters
abstract (ModuleReference): base class for entries referring to a module
- id (moduleId, int): id of the module
abstract (GateReference): base class for entries referring to a gate
- m (moduleId, int): id of module where the gate is
- g (gateId, int): id of the gate
abstract (ConnectionReference): base class for entries referring to a connection
- sm (sourceModuleId, int): id of the source module identifying the connection
- sg (sourceGateId, int): id of the gate at the source module identifying the connection
abstract (MessageReference): base class for entries referring to a message
- id (messageId, msgid_t): id of the message
abstract (ModuleDescription): base class for entries describing a module
- c (moduleClassName, string): C++ class name of the module
- t (nedTypeName, string): fully qualified NED type name
- pid (parentModuleId, int): id of the parent module
- n (fullName, string): full dotted hierarchical module name
- cm (compoundModule, bool): whether module is a simple or compound module
abstract (GateDescription): base class for entries describing a gate
- n (name, string): gate name
- i (index, int): gate index if vector, -1 otherwise
- o (isOutput, bool): whether the gate is input or output
abstract (ConnectionDescription): base class for entries describing a connection
- dm (destModuleId, int): id of the destination module
- dg (destGateId, int): id of the gate at the destination module
abstract (MessageDescription): base class for entries describing a message
- tid (messageTreeId, msgid_t): id of the message inherited by dup
- eid (messageEncapsulationId, msgid_t): id of the message inherited by encapsulation
- etid (messageEncapsulationTreeId, msgid_t): id of the message inherited by both dup and encapsulation
- c (messageClassName, string): C++ class name of the message
- n (messageName, string): message name
- k (messageKind, short): message kind
- p (messagePriority, short): message priority
- l (messageLength, int64_t): message length in bits
- er (hasBitError, bool): true indicates that the message has bit errors
- m (ownerModuleId, int): id of the owner module where the message was found or -1 (FES)
- sm (senderModuleId, int): id of the source module where the message was sent from
- sg (senderGateId, int): id of the gate at the source module from which the message is being sent
- st (sendingTime, simtime_t): simulation time when the message was sent
- am (arrivalModuleId, int): id of the destination module where the message was sent to
- ag (arrivalGateId, int): id of the gate at the source module from which the message is being sent
- at (arrivalTime, simtime_t): simulation time when the message will arrive
- d (detail, string): detailed information of message content when recording message data is turned on
- pe (previousEventNumber, eventnumber_t): event number from which the message being cloned was sent, or -1 if the message was sent from initialize
abstract (ModuleDisplayString): base class for entries describing a module display string
- d (displayString, string): the new display string
abstract (GateDisplayString): base class for entries describing a gate display string
- d (displayString, string): the new display string
abstract (ConnectionDisplayString): base class for entries describing a connection display string
- d (displayString, string): the new display string
abstract (MessageDisplayString): base class for entries describing a message display string
- d (displayString, string): the new display string
CMB (ComponentMethodBegin): beginning of a call to another module
- sm (sourceComponentId, int): id of the caller component
- tm (targetComponentId, int): id of the component being called
- m (methodName, string): C++ method name
CME (ComponentMethodEnd): end of a call to another component
- no parameters
MC (ModuleCreated): creating a module
- no parameters
MD (ModuleDeleted): deleting a module
- no parameters
GC (GateCreated): creating a gate
- no parameters
GD (GateDeleted): deleting a gate
- no parameters
CC (ConnectionCreated): creating a connection
- no parameters
CD (ConnectionDeleted): deleting a connection
- no parameters
MDC (ModuleDisplayStringChanged): a module display string change
- no parameters
GDC (GateDisplayStringChanged): a gate display string change
- no parameters
CDC (ConnectionDisplayStringChanged): a connection display string change
- no parameters
EDC (MessageDisplayStringChanged): a message display string change
- no parameters
CM (CreateMessage): creating a message
- no parameters
CL (CloneMessage): cloning a message either via the copy constructor or by dup
- cid (cloneId, msgid_t): id of the original message that is cloned
DM (DeleteMessage): deleting a message
- no parameters
EN (EncapsulatePacket): encapsulating a packet
- cid (encapsulatedPacketId, msgid_t): id of the encapsulated packet
DE (DecapsulatePacket): decapsulating a packet
- cid (encapsulatedPacketId, msgid_t): id of the encapsulated packet
BS (BeginSend): beginning to send a message
- sd (sendDelay, simtime_t): send after this delay
- up (isUpdate, bool): whether this is a transmission update
- tx (transmissionId, txid_t): for pairing transmission updates with the original transmission
ES (EndSend): prediction of the arrival of a message, only a message reference because can't be alone
- i (isDeliveredImmediately, bool): true indicates the message is delivered
SD (SendDirect): sending a message directly to a destination gate
- sm (senderModuleId, int): id of the source module from which the message is being sent
- dm (destModuleId, int): id of the destination module to which the message is being sent
- dg (destGateId, int): id of the gate at the destination module to which the message is being sent
- pd (propagationDelay, simtime_t): propagation delay as the message is propagated through the connection
- td (transmissionDelay, simtime_t): transmission duration as the whole message is sent from the source gate
- rd (remainingDuration, simtime_t): remaining transmission time (if packet is a tx update)
SH (SendHop): sending a message through a connection identified by its source module and gate id
- sm (senderModuleId, int): id of the source module from which the message is being sent
- sg (senderGateId, int): id of the gate at the source module from which the message is being sent
- pd (propagationDelay, simtime_t): propagation delay as the message is propagated through the connection
- td (transmissionDelay, simtime_t): transmission duration as the whole message is sent from the source gate
- rd (remainingDuration, simtime_t): remaining transmission time (if packet is a tx update)
- d (discard, bool): whether the channel has discarded the message
CE (CancelEvent): canceling an event caused by sending a self message
- no parameters
MF (ModuleFound): a module found in the simulation while traversing the modules (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the module created entry
- ei (lastSeenEntryIndex, int): index of the module created entry
GF (GateFound): a gate found in the simulation while traversing the modules (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the gate created entry
- ei (lastSeenEntryIndex, int): index of the gate created entry
CF (ConnectionFound): a connection found in the simulation while traversing the modules (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the connection created entry
- ei (lastSeenEntryIndex, int): index of the connection created entry
EF (MessageFound): a message found in the future event queue (FES) or while traversing the modules (used in snapshots)
- no parameters
MDF (ModuleDisplayStringFound): a module display string found (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the module display string changed entry
- ei (lastSeenEntryIndex, int): index of the module display string changed entry
GDF (GateDisplayStringFound): a gate display string found (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the gate display string changed entry
- ei (lastSeenEntryIndex, int): index of the gate display string changed entry
CDF (ConnectionDisplayStringFound): a connection display string found (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the connection display string changed entry
- ei (lastSeenEntryIndex, int): index of the connection display string changed entry
EDF (MessageDisplayStringFound): a message display string found (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the message display string changed entry
- ei (lastSeenEntryIndex, int): index of the message display string changed entry
BU (Bubble): display a bubble message
- id (moduleId, int): id of the module which printed the bubble message
- txt (text, string): displayed message text
abstract (CustomReference): custom data reference provided by OMNeT users
- t (type, string): user specified unique type
- k (key, long): unique key that links custom entries together
abstract (CustomDescription): custom data provided by OMNeT users
- c (content, string): user specified content (text, CSV, XML, JSON, etc.)
CUC (CustomCreated): created a custom data object
- no parameters
CUD (CustomDeleted): deleted a custom data object
- no parameters
CUM (CustomChanged): changed a custom data object
- no parameters
CUF (CustomFound): found a custom data object (used in snapshots)
- # (lastSeenEventNumber, eventnumber_t): event number of the corresponding created entry
- ei (lastSeenEntryIndex, int): index of the corresponding created begin entry
CU (Custom): custom data provided by OMNeT users
- no parameters
30 Appendix L: Python API for Chart Scripts¶
This chapter describes the API of the Python modules available for chart scripts. These modules are available in the Analysis Tool in the IDE, in opp_charttool, and may also be used in standalone Python scripts.
Some conventional import aliases appear in code fragments throughout this chapter, such as np for NumPy and pd for Pandas.
30.1 Modules¶
30.1.1 Module omnetpp.scave.results¶
Provides access to simulation results loaded from OMNeT++ result files (.sca, .vec). The results are returned as Pandas DataFrame's of various formats.
The module can be used in several ways, depending on the environment it is run in, and on whether the set of result files to query are specified in a stateful or a stateless way:
-
Inside a chart script in the Analysis Tool in the Simulation IDE. In that mode, the set of result files to take as input are defined on the "Inputs" page of the editor. The get_results(), get_scalars() and similar methods are invoked with a filter string as first argument to select the appropriate subset of results from the result files. Note that this mode of operation is stateful: The state is set up appropriately by the IDE before the chart script is run.
A similar thing happens when charts in an analysis (.anf) file are run from within opp_charttool: the tool sets up the module state before running the chart script, so that the getter methods invoked with a filter string will return result from the set of result files saved as "inputs" in the anf file.
-
Standalone stateful mode. In order to use get_results(), get_scalars() and similar methods with a filter string, the module needs to be configured via the set_inputs()/add_inputs() functions to tell it the set of result files to use as input for the queries. (Doing so is analogous to filling in the "Inputs" page in the IDE).
-
Stateless mode. It is possible to load the result files (in whole or a subset of results in them) into memory as a "raw" DataFrame using read_result_files(), and then use get_scalars(), get_vectors() and other getter functions with the dataframe as their first argument to produce DataFrame's of other formats. Note that when going this route, a filter string can be specified to read_result_files() but not to the getter methods. However, Pandas already provides several ways for filtering the rows of a dataframe, for example by indexing with logical operators on columns, or using the df.query(), df.pipe() or df.apply() methods.
Filter expressions
The filter_or_dataframe parameters in all functions must contain either a filter string, or a "raw" dataframe produced by read_result_files(). When it contains a filter string, the function operates on the set of result files configured earlier (see stateful mode above).
Filter strings of all functions have the same syntax. It is always evaluated independently on every loaded result item or metadata entry, and its value determines whether the given item or piece of metadata is included in the returned DataFrame.
A filter expression is composed of terms that can be combined with the AND, OR, NOT operators, and parentheses. A term filters for the value of some property of the item, and has the form <property> =~ <pattern>, or simply <pattern>. The latter is equivalent to name =~ <pattern>.
The following properties are available:
- name: Name of the result or item.
- module: Full path of the result's module.
- type: Type of the item. Value is one of: scalar, vector, parameter, histogram, statistics.
- isfield: true is the item is a synthetic scalar that represents a field of statistic or a vector, false if not.
- file: File name of the result or item.
- run: Unique run ID of the run that contains the result or item.
- runattr:<name>: Run attribute of the run that contains the result or item. Example: runattr:measurement.
- attr:<name>: Attribute of the result. Example: attr:unit.
- itervar:<name>: Iteration variable of the run that contains the result or item. Example: itervar:numHosts.
- config:<key>: Configuration key of the run that contains the result or item. Example: config:sim-time-limit, config:**.sendIaTime.
Patterns may contain the following wildcards:
- ? matches any character except '.'
- * matches zero or more characters except '.'
- ** matches zero or more characters (any character)
- {a-z} matches a character in range a-z
- {^a-z} matches a character not in range a-z
- {32..255} any number (i.e. sequence of digits) in range 32..255 (e.g. 99)
- [32..255] any number in square brackets in range 32..255 (e.g. [99])
- \ takes away the special meaning of the subsequent character
Patterns only need to be surrounded with quotes if they contain whitespace or other characters that would cause ambiguity in parsing the expression.
Example: module =~ "**.host*" AND (name =~ "pkSent*" OR name =~ "pkRecvd*")
The "raw" dataframe format
This dataframe format is a central one, because the content of "raw" dataframes correspond exactly to the content result files, i.e. it is possible to convert between result files and the "raw" dataframe format without data loss. The "raw" dataframe format also corresponds in a one-to-one manner to the "CSV-R" export format of the Simulation IDE and opp_scavetool.
The outputs of the get_results() and read_result_files() functions are in this format, and the dataframes that can be passed as input into certain query functions (get_scalars(), get_vectors(), get_runs(), etc.) are also expected in the same format.
Columns of the DataFrame:
- runID (string): Identifies the simulation run
- type (string): Row type, one of the following: scalar, vector, statistics, histogram, runattr, itervar, param, attr
- module (string): Hierarchical name (a.k.a. full path) of the module that recorded the result item
- name (string): Name of the result item (scalar, statistic, histogram or vector)
- attrname (string): Name of the run attribute or result item attribute (in the latter case, the module and name columns identify the result item the attribute belongs to)
- attrvalue (string): Value of run and result item attributes, iteration variables, saved ini param settings (runattr, attr, itervar, param)
- value (double or string): Output scalar or parameter value
- count, sumweights, mean, min, max, stddev (double): Fields of the statistics or histogram
- binedges, binvalues (np.array): Histogram bin edges and bin values. len(binedges)==len(binvalues)+1
- underflows, overflows (double): Sum of weights (or counts) of underflown and overflown samples of histograms
- vectime, vecvalue (np.array): Output vector time and value arrays
Requesting metadata columns
Several query functions have the include_attrs, include_runattrs, include_itervars, include_param_assignments, and include_config_entries boolean options. When such an option is turned on, it will add extra columns into the returned DataFrame, one for each result attribute, run attribute, iteration variable, etc. When there is a name clash among items of different types, the column name for the second one will be modified by adding its type after an underscore (_runattr, _itervar, _config, _param).
- include_attrs: Adds the attributes of the result in question
- include_runattrs: Adds the run attributes of the (result's) run
- include_itervars: Adds the iteration variables of the (result's) run
- include_config_entries: Adds all configuration entries of the (result's) run, including parameter parameter assignments and per-object configuration options. If this option is turned on, include_param_assignments has no effect.
- include_param_assignments: Adds the configuration entries that set module or channel parameters. This is a subset of the entries added by include_config_entries.
Note that values in metadata columns are generally strings (with missing values represented as None or nan). The Pandas to_numeric() function or utils.to_numeric() can be used to convert values to float or int where needed.
30.1.1.1 convert_to_base_unit_func()¶
convert_to_base_unit(df, columns_to_convert=["value", "min", "max", "mean", "stddev", "vecvalue", "binedges"])
Converts results with units in the passed DataFrame to their base units in-place. The DataFrame needs to have a "unit" column - which is updated to the base unit. By default, the following columns are converted: "value", "min", "max", "mean", "stddev", "vecvalue", "binedges" Every converted column must contain either all numbers or all np.ndarray instances.
This works for example on the DataFrames returned by get_scalars, get_vectors, get_statistics, and get_histograms in omnetpp.scave, but NOT on those returned by get_results.
30.1.1.2 Class ResultQueryError¶
30.1.1.3 get_serial()¶
get_serial()
Returns an integer that is incremented every time the set of loaded results changes, typically as a result of the IDE loading, reloading or unloading a scalar or vector result file. The serial can be used for invalidating cached intermediate results when their input changes.
30.1.1.4 set_inputs()¶
set_inputs(filenames)
Specifies the set of simulation result files (.vec, .sca) to use as input for the query functions. The argument may be a single string or a list of strings. Each string is interpreted as a file or directory path and may also contain wildcards. In addition to ? and *, ** (which is able to match several directory levels) is also accepted as a wildcard. If a path corresponds to a directory, it is interpreted as [ "<dir>/**/*.sca", "<dir>/**/*.vec" ], that is, all result files will be loaded from that directory and recursively all its subdirectories.
Examples: set_inputs("results/"), set_inputs("results/**.sca"), set_inputs(["config1/*.sca", *config2/*.sca"]).
30.1.1.5 add_inputs()¶
add_inputs(filenames)
Appends to the set of simulation result files (.vec, .sca) to use as input for the query functions. The argument may be a single string or a list of strings. Each string is interpreted as a file or directory path and may also contain wildcards (?, *, **). See set_inputs() for more details.
30.1.1.6 read_result_files()¶
read_result_files(filenames, filter_expression=None, include_fields_as_scalars=False, vector_start_time=-inf, vector_end_time=inf)
Loads the simulation result files specified in the first argument filenames and returns the filtered set of results and metadata as a Pandas DataFrame.
The filenames argument specifies the set of simulation result files (.vec, .sca) to load. The argument may be a single string or a list of strings. Each string is interpreted as a file or directory path and may also contain wildcards (?, *, **). See set_inputs() for more details on this format.
It is possible to limit the set of results to return by specifying a filter expression and vector start/end times.
Parameters:
- filenames (string or list of strings): Specifies the result files to load.
- filter_expression (string): The filter expression to select the desired items to load. Example: module =~ "*host*" AND name =~ "numPacket*"
- include_fields_as_scalars (bool): Optional. If True, the fields of statistics and histograms (:min, :mean, etc.) are also returned as synthetic scalars.
- vector_start_time, vector_end_time (double): Optional time limits to trim the data of vector type results. The unit is seconds, the interval is left-closed, right-open.
Returns: a DataFrame in the "raw" format (see the corresponding section of the module documentation for details).
30.1.1.7 get_results()¶
get_results(filter_or_dataframe="", row_types=None, omit_unused_columns=True, include_fields_as_scalars=False, start_time=-inf, end_time=inf)
Returns a filtered set of results and metadata in a Pandas DataFrame. The items can be any type, even mixed together in a single DataFrame. They are selected from the complete set of data referenced by the analysis file (.anf), including only those for which the given filter_or_dataframe evaluates to True.
Parameters:
- filter_or_dataframe (string or dataframe): The filter expression to select the desired items from the inputs, or a dataframe in the "raw" format. Example: module =~ "*host*" AND name =~ "numPacket*"
- row_types: Optional. When given, filters the returned rows by type. Should be a unique list, containing any number of these strings: "runattr", "itervar", "config", "scalar", "vector", "statistic", "histogram", "param", "attr"
- omit_unused_columns (bool): Optional. If True, all columns that would only contain None are removed from the returned DataFrame
- include_fields_as_scalars (bool): Optional. If True, the fields of statistics and histograms (:min, :mean, etc.) are also returned as synthetic scalars.
- start_time, end_time (double): Optional time limits to trim the data of vector type results. The unit is seconds, the interval is left-closed, right-open.
Returns: a DataFrame in the "raw" format (see the corresponding section of the module documentation for details).
30.1.1.8 get_runs()¶
get_runs(filter_or_dataframe="", include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False)
Returns a filtered list of runs, identified by their run ID.
Parameters:
- filter_or_dataframe (string or dataframe): The filter expression to select the desired run from the inputs, or a dataframe in the "raw" format (e.g. one returned by read_result_files()). Example: runattr:network =~ "Aloha" AND config:Aloha.slotTime =~ 0
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the result, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- Additional metadata items (run attributes, iteration variables, etc.), as requested
30.1.1.9 get_runattrs()¶
get_runattrs(filter_or_dataframe="", include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False)
Returns a filtered list of run attributes.
The set of run attributes is fixed: configname, datetime, experiment, inifile, iterationvars, iterationvarsf, measurement, network, processid, repetition, replication, resultdir, runnumber, seedset.
Parameters:
- filter_or_dataframe (string or dataframe): The filter expression to select the desired run attributes from the inputs, or a dataframe in the "raw" format. Example: name =~ *date* AND config:Aloha.slotTime =~ 0
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the result, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- name (string): The name of the run attribute
- value (string): The value of the run attribute
- Additional metadata items (run attributes, iteration variables, etc.)
30.1.1.10 get_itervars()¶
get_itervars(filter_or_dataframe="", include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False)
Returns a filtered list of iteration variables.
Parameters:
- filter_or_dataframe (string or dataframe): The filter expression to select the desired iteration variables from the inputs, or a dataframe in the "raw" format. Example: name =~ iaMean AND config:Aloha.slotTime =~ 0
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the result, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- name (string): The name of the iteration variable
- value (string): The value of the iteration variable.
- Additional metadata items (run attributes, iteration variables, etc.), as requested
30.1.1.11 get_scalars()¶
get_scalars(filter_or_dataframe="", include_attrs=False, include_fields=False, include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False, convert_to_base_unit=True)
Returns a filtered list of scalar results.
Parameters:
- filter_or_dataframe (string): The filter expression to select the desired scalars, or a dataframe in the "raw" format. Example: name =~ "channelUtilization*" AND runattr:replication =~ "#0"
- include_attrs (bool): Optional. When set to True, result attributes (like unit for example) are appended to the DataFrame, pivoted into columns.
- include_fields (bool): Optional. If True, the fields of statistics and histograms (:min, :mean, etc.) are also returned as synthetic scalars.
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the DataFrame, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
- convert_to_base_unit (bool): Optional. If True, the values of the scalars are converted to their base unit (e.g. ms to s, mW to W, etc.)
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- module (string): Hierarchical name (a.k.a. full path) of the module that recorded the result item
- name (string): The name of the scalar
- value (double): The value of the scalar
- Additional metadata items (result attributes, run attributes, iteration variables, etc.), as requested
30.1.1.12 get_parameters()¶
get_parameters(filter_or_dataframe="", include_attrs=False, include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False)
Returns a filtered list of parameters - actually computed values of individual cPar instances in the fully built network.
Parameters are considered "pseudo-results", similar to scalars - except their values are strings. Even though they act mostly as input to the actual simulation run, the actually assigned value of individual cPar instances is valuable information, as it is the result of the network setup process. For example, even if a parameter is set up as an expression like normal(3, 0.4) from omnetpp.ini, the returned DataFrame will contain the single concrete value picked for every instance of the parameter.
Parameters:
- filter_or_dataframe (string): The filter expression to select the desired parameters, or a dataframe in the "raw" format. Example: name =~ "x" AND module =~ Aloha.server
- include_attrs (bool): Optional. When set to True, result attributes (like unit) are appended to the DataFrame, pivoted into columns.
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the DataFrame, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- module (string): Hierarchical name (a.k.a. full path) of the module that recorded the result item
- name (string): The name of the parameter
- value (string): The value of the parameter.
- Additional metadata items (result attributes, run attributes, iteration variables, etc.), as requested
30.1.1.13 get_vectors()¶
get_vectors(filter_or_dataframe="", include_attrs=False, include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False, start_time=-inf, end_time=inf, convert_to_base_unit=True, omit_empty_vectors=False)
Returns a filtered list of vector results.
Parameters:
- filter_or_dataframe (string): The filter expression to select the desired vectors, or a dataframe in the "raw" format. Example: name =~ "radioState*" AND runattr:replication =~ "#0"
- include_attrs (bool): Optional. When set to True, result attributes (like unit or source) are appended to the DataFrame, pivoted into columns.
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the DataFrame, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
- start_time, end_time (double): Optional time limits to trim the data of vector type results. The unit is seconds, both the vectime and vecvalue arrays will be affected, the interval is left-closed, right-open.
- convert_to_base_unit (bool): Optional. If True, the values in the vectors are converted to their base unit (e.g. ms to s, mW to W, etc.)
- omit_empty_vectors (bool): Optional. If True, empty vectors are discarded from the output.
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- module (string): Hierarchical name (a.k.a. full path) of the module that recorded the result item
- name (string): The name of the vector
- vectime, vecvalue (np.array): The simulation times and the corresponding values in the vector
- Additional metadata items (result attributes, run attributes, iteration variables, etc.), as requested
30.1.1.14 get_statistics()¶
get_statistics(filter_or_dataframe="", include_attrs=False, include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False, convert_to_base_unit=True)
Returns a filtered list of statistics results.
Parameters:
- filter_or_dataframe (string): The filter expression to select the desired statistics, or a dataframe in the "raw" format. Example: name =~ "collisionLength:stat" AND itervar:iaMean =~ "5"
- include_attrs (bool): Optional. When set to True, result attributes (like unit or source) are appended to the DataFrame, pivoted into columns.
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the DataFrame, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
- convert_to_base_unit (bool): Optional. If True, some fields of the statistics (in the min, max, mean, and stddev columns) are converted to their base unit (e.g. ms to s, mW to W, etc.)
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- module (string): Hierarchical name (a.k.a. full path) of the module that recorded the result item
- name (string): The name of the statistic
- count, sumweights, mean, stddev, min, max (double): The characteristic mathematical properties of the statistics result
- Additional metadata items (result attributes, run attributes, iteration variables, etc.), as requested
30.1.1.15 get_histograms()¶
get_histograms(filter_or_dataframe="", include_attrs=False, include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False, convert_to_base_unit=True)
Returns a filtered list of histogram results.
Parameters:
- filter_or_dataframe (string): The filter expression to select the desired histograms, or a dataframe in the "raw" format. Example: name =~ "collisionMultiplicity:histogram" AND itervar:iaMean =~ "2"
- include_attrs (bool): Optional. When set to True, result attributes (like unit or source for example) are appended to the DataFrame, pivoted into columns.
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the DataFrame, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
- convert_to_base_unit (bool): Optional. If True, some fields of the histograms (in the min, max, mean, stddev, and binedges columns) are converted to their base unit (e.g. ms to s, mW to W, etc.)
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- module (string): Hierarchical name (a.k.a. full path) of the module that recorded the result item
- name (string): The name of the vector
- count, sumweights, mean, stddev, min, max (double): The characteristic mathematical properties of the histogram
- binedges, binvalues (np.array): The histogram edge locations and the weighted sum of the collected samples in each bin. len(binedges) == len(binvalues) + 1
- underflows, overflows (double): The weighted sum of the samples that fell outside of the histogram bin range in the two directions
- Additional metadata items (result attributes, run attributes, iteration variables, etc.), as requested
30.1.1.16 get_config_entries()¶
get_config_entries(filter_or_dataframe, include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False)
Returns a filtered list of config entries. That is: parameter assignment patterns; and global and per-object config options.
Parameters:
- filter_or_dataframe (string): The filter expression to select the desired config entries, or a dataframe in the "raw" format. Example: name =~ sim-time-limit AND itervar:numHosts =~ 10
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the result, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- name (string): The name of the config entry
- value (string): The value of the config entry
- Additional metadata items (run attributes, iteration variables, etc.), as requested
30.1.1.17 get_param_assignments()¶
get_param_assignments(filter_or_dataframe, include_runattrs=False, include_itervars=False, include_param_assignments=False, include_config_entries=False)
Returns a filtered list of parameter assignment patterns. The result is a subset of what get_config_entries would return with the same arguments.
Parameters:
- filter_or_dataframe (string): The filter expression to select the desired parameter assignments, or a dataframe in the "raw" format. Example: name =~ **.flowID AND itervar:numHosts =~ 10
- include_runattrs, include_itervars, include_param_assignments, include_config_entries (bool): Optional. When set to True, additional pieces of metadata about the run is appended to the result, pivoted into columns. See the "Metadata columns" section of the module documentation for details.
Columns of the returned DataFrame:
- runID (string): Identifies the simulation run
- name (string): The parameter assignment pattern
- value (string): The assigned value
- Additional metadata items (run attributes, iteration variables, etc.), as requested
30.1.2 Module omnetpp.scave.chart¶
Provides access to the properties of the current chart for the chart script.
Note that this module is stateful. It is set up appropriately by the OMNeT++ IDE or opp_charttool before the chart script is run.
30.1.2.1 Class ChartScriptError¶
Raised by chart scripts when they encounter an error. A message parameter can be passed to the constructor, which will be displayed on the plot area in the IDE.
30.1.2.2 get_properties()¶
get_properties()
Returns the currently set properties of the chart as a dict whose keys and values are both strings.
30.1.2.3 get_property()¶
get_property(key)
Returns the value of a single property of the chart, or None if there is no property with the given name (key) set on the chart.
30.1.2.4 get_name()¶
get_name()
Returns the name of the chart as a string.
30.1.2.5 get_chart_type()¶
get_chart_type()
Returns the chart type, which is one of the strings "BAR", "LINE", "HISTOGRAM", and "MATPLOTLIB".
30.1.2.6 is_native_chart()¶
is_native_chart()
Returns True if this chart uses the IDE's built-in plotting widgets.
30.1.2.7 set_suggested_chart_name()¶
set_suggested_chart_name(name)
Sets a proposed name for the chart. The IDE may offer this name to the user when saving the chart.
30.1.2.8 set_observed_column_names()¶
set_observed_column_names(column_names)
Sets the DataFrame column names observed during the chart script. The IDE may use them for content assist when the user edits the legend format string.
30.1.3 Module omnetpp.scave.ideplot¶
This module is the interface for displaying plots using the IDE's native (non-Matplotlib) plotting widgets from chart scripts. The API is intentionally very close to matplotlib.pyplot: most functions and the parameters they accept are a subset of pyplot's interface. If one restricts themselves to a subset of Matplotlib's functionality, switching between omnetpp.scave.ideplot and matplotlib.pyplot in a chart script may be as simple as much as editing the import statement.
When the API is used outside the context of a native plotting widget (such as during the run of opp_charttool, or in IDE during image export), the functions are emulated with Matplotlib.
Note that this module is stateful. It is set up appropriately by the OMNeT++ IDE or opp_charttool before the chart script is run.
30.1.3.1 is_native_plot()¶
is_native_plot()
Returns True if the script is running in the context of a native plotting widget, and False otherwise.
30.1.3.2 plot()¶
plot(xs, ys, key=None, label=None, drawstyle=None, linestyle=None, linewidth=None, color=None, marker=None, markersize=None)
Plot ys versus xs as lines and/or markers. Call plot multiple times to plot multiple sets of data.
Parameters:
- xs, ys (array-like or scalar): The horizontal / vertical coordinates of the data points.
- key (string): Identifies the series in the native plot widget.
- label (string): Series label for the legend
- drawstyle (string): Matplotlib draw style ('default', 'steps', 'steps-pre', 'steps-mid', 'steps-post')
- linestyle (string): Matplotlib line style ('-', '--', '-.', ':', etc)
- linewidth (float): Line width in pixels
- color (string): Matplotlib color name or abbreviation ('b' for blue, 'g' for green, etc.)
- marker (string): Matplotlib marker name ('.', ',', 'o', 'x', '+', etc.)
- markersize (float): Size of markers in pixels.
30.1.3.3 hist()¶
hist(x, bins, key=None, density=False, weights=None, cumulative=False, bottom=None, histtype="stepfilled", color=None, label=None, linewidth=None, underflows=0.0, overflows=0.0, minvalue=nan, maxvalue=nan)
Make a histogram plot. This function adds one histogram to the bar plot; make multiple calls to add multiple histograms.
Parameters:
- x (array-like): Input values.
- bins (array-like): Bin edges, including the left edge of the first bin and the right edge of the last bin.
- key (string): Identifies the series in the native plot widget.
- density (bool): See mpl.hist().
- weights (array-like): Weights.
- cumulative (bool): See mpl.hist().
- bottom (float): Location of the bottom baseline for bins.
- histtype (string): Whether to fill the area under the plot. Accepted values are 'step' and 'stepfilled'.
- color (string): Matplotlib color name or abbreviation ('b' for blue, 'g' for green, etc.)
- label (string): Series label for the legend
- linewidth (float): Line width in pixels
- underflows, overflows: Number of values / sum of weights outside the histogram bins in both directions.
- minvalue, maxvalue: The minimum and maximum value, or nan if unknown.
Restrictions:
- Overflow bin data (minvalue, maxvalue, underflows, and overflows) is not accepted by pyplot.hist().
- The native plot widget only accepts a precomputed histogram (using the trick documented for pyplot.hist())
30.1.3.4 bar()¶
bar(x, height, width=0.8, key=None, label=None, color=None, edgecolor=None)
Make a bar plot. This function adds one series to the bar plot; make multiple calls to add multiple series.
The bars are positioned at x with the given alignment. Their dimensions are given by width and height. The vertical baseline is bottom (default 0).
Each of x, height, width, and bottom may either be a scalar applying to all bars, or it may be a sequence of length N providing a separate value for each bar.
Parameters:
- x (sequence of scalars): The x coordinates of the bars.
- height (scalar or sequence of scalars): The height(s) of the bars.
- width (scalar or array-like): The width(s) of the bars.
- key (string): Identifies the series in the native plot widget.
- label (string): The label of the series the bars represent.
- color (string): The fill color of the bars.
- edgecolor (string): The edge color of the bars.
The native plot implementation has the following restrictions:
- widths are automatic (the parameter is ignored)
- x coordinates are automatic (values are ignored)
- height must be a sequence (cannot be a scalar)
- in multiple calls to bar(), the lengths of the height sequence must be equal (i.e. all series must have the same number of values)
- the default color is grey (Matplotlib assigns a different color to each series)
30.1.3.5 set_property()¶
set_property(key, value)
Sets one property of the native plot widget to the given value. When invoked outside the context of a native plot widget, the function does nothing.
Parameters:
- key (string): Name of the property.
- value (string): The value to set. If any other type other than a string is passed in, it will be converted to a string.
30.1.3.6 set_properties()¶
set_properties(props)
Sets several properties of the native plot widget. It is functionally equivalent to repeatedly calling set_property with the entries of the props dictionary. When invoked outside the context of a native plot widget (TODO?), the function does nothing.
Parameters:
- props (dict): The properties to set.
30.1.3.7 get_supported_property_keys()¶
get_supported_property_keys()
Returns the list of property names that the native plot widget supports, such as 'Plot.Title', 'X.Axis.Max', and 'Legend.Display', among many others.
Note: This method has no equivalent in pyplot. When the script runs outside the IDE (TODO?), the method returns an empty list.
30.1.3.8 set_warning()¶
set_warning(warning: str)
Displays the given warning text in the plot.
30.1.3.9 title()¶
title(label: str)
Sets the plot title to the given string.
30.1.3.10 xlabel()¶
xlabel(xlabel: str)
Sets the label of the X-axis to the given string.
30.1.3.11 ylabel()¶
ylabel(ylabel: str)
Sets the label of the Y-axis to the given string.
30.1.3.12 xlim()¶
xlim(left=None, right=None)
Sets the limits of the X-axis.
Parameters:
- left (float): The left xlim in data coordinates. Passing None leaves the limit unchanged.
- right (float): The right xlim in data coordinates. Passing None leaves the limit unchanged.
30.1.3.13 ylim()¶
ylim(bottom=None, top=None)
Sets the limits of the Y-axis.
Parameters:
- bottom (float): The bottom ylim in data coordinates. Passing None leaves the limit unchanged.
- top (float): The top ylim in data coordinates. Passing None leaves the limit unchanged.
30.1.3.14 xscale()¶
xscale(value: str)
Sets the scale of the X-axis. Possible values are 'linear' and 'log'.
30.1.3.15 yscale()¶
yscale(value: str)
Sets the scale of the Y-axis.
30.1.3.16 xticks()¶
xticks(ticks=None, labels=None, rotation=0)
Sets the current tick locations and labels of the x-axis.
Parameters:
- ticks (array_like): A list of positions at which ticks should be placed. You can pass an empty list to disable xticks.
- labels (array_like): A list of explicit labels to place at the given locs.
- rotation (float): Label rotation in degrees.
30.1.3.17 grid()¶
grid(b=True, which="major")
Configure the grid lines.
Parameters:
- b (bool or None): Whether to show the grid lines.
- which ('major', 'minor', or 'both'): The grid lines to apply the changes to.
30.1.3.18 legend()¶
legend(show=None, frameon=None, loc=None)
Place a legend on the axes.
Parameters:
- show (bool or None): Whether to show the legend. TODO does pyplot have this?
- frameon (bool or None): Control whether the legend should be drawn on a patch (frame). Default is None, which will take the value from the resource file.
- loc (string or None): The location of the legend. Possible values are 'best', 'upper right', 'upper left', 'lower left', 'lower right', 'right', 'center left', 'center right', 'lower center', 'upper center', 'center' (these are the values supported by Matplotlib), plus additionally 'outside top left', 'outside top center', 'outside top right', 'outside bottom left', 'outside bottom center', 'outside bottom right', 'outside left top', 'outside left center', 'outside left bottom', 'outside right top', 'outside right center', 'outside right bottom'.
30.1.4 Module omnetpp.scave.utils¶
A collection of utility function for data manipulation and plotting, built on top of Pandas data frames and the chart and ideplot packages from omnetpp.scave. Functions in this module have been written largely to the needs of the chart templates that ship with the IDE.
There are some functions which are (almost) mandatory elements in a chart script. These are the following.
If you want style settings in the chart dialog to take effect:
- preconfigure_plot()
- postconfigure_plot()
If you want image/data export to work:
- export_image_if_needed()
- export_data_if_needed()
30.1.4.1 set_verbose_export()¶
set_verbose_export(v)
Sets the verbose_export flag, which controls whether the export_image_if_needed() and export_data_if_needed() functions will print an "Exported <filename>" message after the export. The default setting is False.
30.1.4.2 convert_to_base_unit()¶
convert_to_base_unit(df, columns_to_convert=["value", "min", "max", "mean", "stddev", "vecvalue", "binedges"])
Converts results with units in the passed DataFrame to their base units in-place. The DataFrame needs to have a "unit" column - which is updated to the base unit. By default, the following columns are converted: "value", "min", "max", "mean", "stddev", "vecvalue", "binedges" Every converted column must contain either all numbers or all np.ndarray instances.
This works for example on the DataFrames returned by get_scalars, get_vectors, get_statistics, and get_histograms in omnetpp.scave, but NOT on those returned by get_results.
30.1.4.3 make_legend_label()¶
make_legend_label(legend_cols, row, props={})
Produces a reasonably good label text (to be used in a chart legend) for a result row from a DataFrame. The legend label is produced as follows.
First, a base version of the legend label is produced:
- If the DataFrame contains a legend column, its content is used.
- Otherwise, if there is a legend_format property, it is used as a format string for producing the legend label. The format string may contain references to other columns of the DataFrame in the "$name" or "${name}" form.
- Otherwise, the legend label is concatenated from the columns listed in legend_cols, a list whose contents are usually produced using the extract_label_columns() function.
Second, if there is a legend_replacements property, it defines a series of replacements to be done on the legend labels. legend_replacements is expected to be a multi-line string, where each line contains a replacement. A replacement line can be a plain substring replacement in the findstring --> replacement syntax, or a regex replacement in the sed-style /findregex/replacement/ syntax. With the latter, "findregex" should be a valid regular expression, and "replacement" a string that may contain match group references ("\1", "\2", etc.). If "/" is unsuitable as separator, other characters may also be used; common choices are "|" and "!". Similar to the legend_format property, "findstring", "findregex" and "replacement" may contain column references in the "$name" or "${name}" form. Use "$$" to mean a single "$" sign. Also note that "findregex" may still end in "$" to match the end of the string; it won't collide with column references.
Parameters:
- row (named tuple): The row from the dataframe.
- props (dict): The properties that control how the legend is produced.
- legend_cols (list of strings): The names of columns chosen for the legend.
Properties that affect the generated legend label:
- legend_automatic (string): If true, do not use the legend format string even if present.
- legend_format (string): A format string to produce the label from columns.
- legend_replacements (string): A multi-line string of regex find/replace operations to modify the label.
Possible errors:
- References to nonexistent columns in legend_format or legend_replacements (KeyError)
- Malformed regex in the "findstring" parts of legend_replacements (re.error)
- Invalid group reference in the "replacement" parts of legend_replacements (re.error)
30.1.4.4 add_legend_labels()¶
add_legend_labels(df, props, legend_cols=None)
Adds a legend column to the dataframe. In the dataframe, each row is expected to represent an item to be plotted. The legend label will be computed for each item individually by the make_legend_label() function.
Parameters:
- df: The dataframe.
- props (dict): The properties.
Notable properties that affect the legend generation: See the documentation of make_legend_label().
30.1.4.5 sort_rows_by_legend()¶
sort_rows_by_legend(df, props=())
Sorts the rows of the dataframe, where each row represents an item to be plotted. The dataframe is expected to have a legend column, which will serve as the basis for ordering.
Ordering is based on two lists of regexes, one for primary ordering and another one for secondary ordering. Each item's rank will be determined by the index of the first regex the item's legend matches. After sorting, items matching the first regex will appear at the top, those matching the second regex will be placed below, and so forth. Case-sensitive substring match is used.
Parameters:
- df: The dataframe.
- props (dict): The properties.
Notable properties that affect the ordering:
- ordering_regex_list: Regex list for primary ordering, as multi-line string (one regex per line).
- secondary_ordering_regex_list: Regex list for secondary ordering, as multi-line string (one regex per line).
- sorting: Boolean to determine if sorting should be applied
30.1.4.6 plot_bars()¶
plot_bars(df, errors_df=None, meta_df=None, props={}, sort=True)
Creates a bar plot from the dataframe, with styling and additional input coming from the properties. Each row in the dataframe defines a series.
Group names (displayed on the x axis) are taken from the column index.
Error bars can be drawn by providing an extra dataframe of identical dimensions as the main one. Error bars will protrude by the values in the errors dataframe both up and down (i.e. range is 2x error).
To make the legend labels customizable, an extra dataframe can be provided, which contains any columns of metadata for each series.
Colors are assigned automatically. The cycle_seed property allows you to select other combinations if the default one is not suitable.
Parameters:
- df: The dataframe.
- errors_df: Dataframe with the errors (in y axis units).
- meta_df: Dataframe with the metadata about each series.
- props (dict): The properties.
- sort (bool): Whether to sort the values by the column and row indices (which are the labels of the bar series and groups).
Notable properties that affect the plot:
- baseline: The y value at which the x axis is drawn.
- bar_placement: Selects the arrangement of bars: aligned, overlap, stacked, etc.
- xlabel_rotation: Amount of counter-clockwise rotation of x axis labels a.k.a. group names, in degrees.
- title: Plot title (autocomputed if missing).
- cycle_seed: Alters the sequence in which colors are assigned to series.
- unit: If present, it is required to be the same for all series, and it will be used in the automatic y axis label.
30.1.4.7 plot_vectors()¶
plot_vectors(df, props, legend_func=make_legend_label, sort=True)
Creates a line plot from the dataframe, with styling and additional input coming from the properties. Each row in the dataframe defines a series.
Colors and markers are assigned automatically. The cycle_seed property allows you to select other combinations if the default one is not suitable.
A function to produce the legend labels can be passed in. By default, make_legend_label() is used, which offers many ways to influence the legend via dataframe columns and chart properties. In the absence of more specified settings, the legend is normally computed from columns which best differentiate among the vectors.
Parameters:
- df: The dataframe.
- props (dict): The properties.
- legend_func (function): The function to produce custom legend labels. See utils.make_legend_label() for prototype and semantics.
- sort (bool): Whether to sort the vectors by the columns used for the legend (before applying legend_func, for backwards bug-compatibility).
Columns of the dataframe:
- vectime, vecvalue (Numpy ndarray's of matching sizes): the x and y coordinates for the plot
- interpolationmode (str, optional): this column normally comes from a result attribute, and determines how the points will be connected
- legend (optional): legend label for the series; if missing, legend labels are derived from other columns
- name, title, module, etc. (optional): provide input for the legend
Notable properties that affect the plot:
- title: plot title (autocomputed if missing)
- drawstyle: Matplotlib draw style; if present, it overrides the draw style derived from interpolationmode.
- linestyle, linecolor, linewidth, marker, markersize: styling
- cycle_seed: Alters the sequence in which colors and markers are assigned to series.
- unit: If present, it is required to be the same for all series, and it will be used in the automatic y axis label.
30.1.4.8 plot_vectors_separate()¶
plot_vectors_separate(df, props, legend_func=make_legend_label, sort=True)
This is very similar to plot_vectors, with identical usage. The only difference is in the end result, where each vector will be plotted in its own separate set of axes (coordinate system), arranged vertically, with a shared X axis during navigation.
30.1.4.9 plot_histograms()¶
plot_histograms(df, props, legend_func=make_legend_label, sort=True)
Creates a histogram plot from the dataframe, with styling and additional input coming from the properties. Each row in the dataframe defines a histogram.
Colors are assigned automatically. The cycle_seed property allows you to select other combinations if the default one is not suitable.
A function to produce the legend labels can be passed in. By default, make_legend_label() is used, which offers many ways to influence the legend via dataframe columns and chart properties. In the absence of more specified settings, the legend is normally computed from columns that best differentiate among the histograms.
Parameters:
- df: The dataframe.
- props (dict): The properties.
- legend_func (function): The function to produce custom legend labels. See utils.make_legend_label() for the prototype and semantics.
- sort (bool): Whether to sort the histograms by the columns used for the legend (before applying legend_func, for backward bug-compatibility).
Columns of the dataframe:
- binedges, binvalues (array-like, len(binedges)==len(binvalues)+1): The bin edges and the bin values (count or sum of weights) for the histogram.
- min, max, underflows, overflows (float, optional): The minimum/maximum values, and the bin values for the underflow/overflow bins. These four columns must either be all present or all absent from the dataframe.
- legend (string, optional): Legend label for the series. If missing, legend labels are derived from other columns.
- name, title, module, etc. (optional): Provide input for the legend.
Notable properties that affect the plot:
- normalize (bool): If true, normalize the sum of the bin values to 1. If normalize is true (and cumulative is false), the probability density function (PDF) will be displayed.
- cumulative (bool): If true, show each bin as the sum of the previous bin values plus itself. If both normalize and cumulative are true, that results in the cumulative density function (CDF) being displayed.
- show_overflows (bool): If true, show the underflow/overflow bins.
- title: Plot title (autocomputed if missing).
- drawstyle: Selects whether to fill the area below the histogram line.
- linestyle, linecolor, linewidth: Styling.
- cycle_seed: Alters the sequence in which colors and markers are assigned to series.
- unit: If present, it is required to be the same for all series and will be used in the automatic x-axis label.
30.1.4.10 plot_lines()¶
plot_lines(df, props, legend_func=make_legend_label, sort=True)
Creates a line plot from the dataframe, with styling and additional input coming from the properties. Each row in the dataframe defines a line.
Colors are assigned automatically. The cycle_seed property allows you to select other combinations if the default one is not suitable.
A function to produce the legend labels can be passed in. By default, make_legend_label() is used, which offers many ways to influence the legend via dataframe columns and chart properties. In the absence of more specified settings, the legend is normally computed from columns that best differentiate among the lines.
Parameters:
- df: The dataframe.
- props (dict): The properties.
- legend_func (function): The function to produce custom legend labels. See utils.make_legend_label() for the prototype and semantics.
- sort (bool): Whether to sort the series by the columns used for the legend (before applying legend_func, for backward bug-compatibility).
Columns of the dataframe:
- x, y (array-like, len(x)==len(y)): The X and Y coordinates of the points.
- error (array-like, len(x)==len(y), optional): The half lengths of the error bars for each point.
- legend (string, optional): Legend label for the series. If missing, legend labels are derived from other columns.
- name, title, module, etc. (optional): Provide input for the legend.
Notable properties that affect the plot:
- title: Plot title (autocomputed if missing).
- linewidth: Line width.
- marker: Marker style.
- linestyle, linecolor, linewidth: Styling.
- error_style: If error is present, controls how the error is shown. Accepted values: "Error bars", "Error band"
- cycle_seed: Alters the sequence in which colors and markers are assigned to series.
- unit: If present, it is required to be the same for all series and will be used in the automatic y-axis label.
30.1.4.11 plot_boxwhiskers()¶
plot_boxwhiskers(df, props, legend_func=make_legend_label, sort=True)
Creates a box and whiskers plot from the dataframe, with styling and additional input coming from the properties. Each row in the dataframe defines one set of a box and two whiskers.
Colors are assigned automatically. The cycle_seed property allows you to select other combinations if the default one is not suitable.
A function to produce the legend labels can be passed in. By default, make_legend_label() is used, which offers many ways to influence the legend via dataframe columns and chart properties. In the absence of more specified settings, the legend is normally computed from columns that best differentiate among the boxes.
Parameters:
- df: The dataframe.
- props (dict): The properties.
- legend_func (function): The function to produce custom legend labels. See utils.make_legend_label() for the prototype and semantics.
- sort (bool): Whether to sort the series by the columns used for the legend (before applying legend_func, for backward bug-compatibility).
Columns of the dataframe:
- min, max, mean, stddev, count (float): The minimum/maximum values, mean, standard deviation, and sample count of the data.
- legend (string, optional): Legend label for the series. If missing, legend labels are derived from other columns.
- name, title, module, etc. (optional): Provide input for the legend.
Notable properties that affect the plot:
- title: Plot title (autocomputed if missing).
- cycle_seed: Alters the sequence in which colors and markers are assigned to series.
- unit: If present, it is required to be the same for all series and will be used in the automatic y-axis label.
30.1.4.12 customized_box_plot()¶
customized_box_plot(percentiles, labels=None, axes=None, redraw=True, *args, **kwargs)
Generates a customized box-and-whiskers plot based on explicitly specified percentile values. This method is necessary because pyplot.boxplot() insists on computing the stats from the raw data (which we often don't have) itself.
The data is in the percentiles argument, which should be a list of tuples. One box will be drawn for each tuple. Each tuple contains 6 elements (or 5, because the last one is optional):
(q1_start, q2_start, q3_start, q4_start, q4_end, fliers)
The first five elements have the following meaning:
- q1_start: y coord of bottom whisker cap
- q2_start: y coord of bottom of the box
- q3_start: y coord of median mark
- q4_start: y coord of top of the box
- q4_end: y coord of top whisker cap
The last element, fliers, is a list containing the values of the outlier points.
x coords of the box-and-whiskers plots are automatic.
Parameters:
- percentiles: The list of tuples.
- labels: If provided, the legend labels for the boxes.
- axes: The axes object of the plot.
- redraw: If False, redraw is deferred.
- args, kwargs: Passed to axes.boxplot().
30.1.4.13 preconfigure_plot()¶
preconfigure_plot(props)
Configures the plot according to the given properties, which normally get their values from settings in the "Configure Chart" dialog. Calling this function before plotting is performed should be a standard part of chart scripts.
A partial list of properties taken into account for native plots:
- property keys understood by the plot widget, see ideplot.get_supported_property_keys()
And for Matplotlib plots:
- plt.style
- properties listed in the matplotlibrc property
- properties prefixed with matplotlibrc.
Parameters:
- props (dict): the properties
30.1.4.14 postconfigure_plot()¶
postconfigure_plot(props)
Configures the plot according to the given properties, which normally get their values from settings in the "Configure Chart" dialog. Calling this function after plotting is performed should be a standard part of chart scripts.
A partial list of properties taken into account:
- yaxis_title, yaxis_title, xaxis_min, xaxis_max, yaxis_min, yaxis_max, xaxis_log, yaxis_log, legend_show, legend_border, legend_placement, grid_show, grid_density
- properties listed in the plot.properties property
Parameters:
- props (dict): the properties
30.1.4.15 export_image_if_needed()¶
export_image_if_needed(props)
If a certain property is set, save the plot in the selected image format. Calling this function should be a standard part of chart scripts, as it is what makes the "Export image" functionality of the IDE and opp_charttool work.
Note that for export, even IDE-native charts are rendered using Matplotlib.
The properties that are taken into account:
- export_image (boolean): Controls whether to perform the exporting. This is normally false, and only set to true by the IDE or opp_charttool when image export is requested.
- image_export_format: The default is SVG. Accepted formats (and their names) are the ones supported by Matplotlib.
- image_export_folder: The folder in which the image file is to be created.
- image_export_filename: The output file name. If it has no extension, one will be added based on the format. If missing or empty, a sanitized version of the chart name is used.
- image_export_width: Image width in inches (default: 6")
- image_export_height: Image height in inches (default: 4")
- image_export_dpi: DPI setting, default 300. For raster image formats, the image dimensions are produced as width (or height) times dpi.
Note that these properties come from two sources to allow meaningful batch export. export_image, image_export_format, image_export_folder and image_export_dpi come from the export dialog because they are common to all charts, while image_export_filename, image_export_width and image_export_height come from the chart properties because they are specific to each chart. Note that image_export_dpi is used for controlling the resolution (for raster image formats) while letting charts maintain their own aspect ratio and relative sizes.
Parameters:
- props (dict): the properties
30.1.4.16 get_image_export_filepath()¶
get_image_export_filepath(props)
Returns the file path for the image to export based on the image_export_format, image_export_folder and image_export_filename properties given in props. If a relative filename is returned, it is relative to the working directory when the image export takes place.
30.1.4.17 export_data_if_needed()¶
export_data_if_needed(df, props, **kwargs)
If a certain property is set, save the dataframe in CSV format. Calling this function should be a standard part of chart scripts, as it is what makes the "Export data" functionality of the IDE and opp_charttool work.
The properties that are taken into account:
- export_data (boolean): Controls whether to perform the exporting. This is normally false, and only set to true by the IDE or opp_charttool when data export is requested.
- data_export_folder: The folder in which the CSV file is to be created.
- data_export_filename: The output file name. If missing or empty, a sanitized version of the chart name is used.
Note that these properties come from two sources to allow meaningful batch export. export_data and image_export_folder come from the export dialog because they are common to all charts, and image_export_filename comes from the chart properties because it is specific to each chart.
Parameters:
- df: the dataframe to save
- props (dict): the properties
30.1.4.18 get_data_export_filepath()¶
get_data_export_filepath(props)
Returns the file path for the data to export based on the data_export_format, data_export_folder and data_export_filename properties given in props. If a relative filename is returned, it is relative to the working directory when the data export takes place.
30.1.4.19 histogram_bin_edges()¶
histogram_bin_edges(values, bins=None, range=None, weights=None)
An improved version of numpy.histogram_bin_edges. This will only return integer edges for input arrays consisting entirely of integers (unless the bins are explicitly given otherwise). In addition, the rightmost edge will always be strictly greater than the maximum of values (unless explicitly given otherwise in range).
30.1.4.20 confidence_interval()¶
confidence_interval(alpha, data)
Returns the half-length of the confidence interval of the mean of data, assuming normal distribution, for the given confidence level alpha.
Parameters:
- alpha (float): Confidence level, must be in the [0..1] range.
- data (array-like): An array containing the values.
30.1.4.21 pivot_for_barchart()¶
pivot_for_barchart(df, groups, series, confidence_level=None, sort=True)
Turns a DataFrame containing scalar results (in the format returned by results.get_scalars()) into a 3-tuple of a value, an error, and a metadata DataFrame, which can then be passed to utils.plot_bars(). The error dataframe is None if no confidence level is given.
Parameters:
- df (pandas.DataFrame): The dataframe to pivot.
- groups (list): A list of column names, the values in which will be used as names for the bar groups.
- series (list): A list of column names, the values in which will be used as names for the bar series.
- confidence_level (float, optional): The confidence level to use when computing the sizes of the error bars.
- sort (bool): Whether to sort the values by the columns in groups and series before pivoting.
Returns:
- A triplet of DataFrames containing the pivoted data: (values, errors, metadata)
30.1.4.22 pivot_for_scatterchart()¶
pivot_for_scatterchart(df, xaxis_itervar, group_by, confidence_level=None)
Turns a DataFrame containing scalar results (in the format returned by results.get_scalars()) into a DataFrame which can then be passed to utils.plot_lines().
Parameters:
- df (pandas.DataFrame): The dataframe to pivot.
- xaxis_itervar (string): The name of the iteration variable whose values are to be used as X coordinates.
- group_by (list): A list of column names, the values in which will be used to group the scalars into lines.
- confidence_level (float, optional): The confidence level to use when computing the sizes of the error bars.
Returns:
- A DataFrame containing the pivoted data, with these columns: name, x, y, and optionally error - if confidence_level is given.
30.1.4.23 get_confidence_level()¶
get_confidence_level(props)
Returns the confidence level from the confidence_level property, converted to a float. Also accepts "none" (returns None in this case), and percentage values (e.g. "95%").
30.1.4.24 perform_vector_ops()¶
perform_vector_ops(df, operations: str)
Performs the given vector operations on the dataframe, and returns the resulting dataframe. Vector operations primarily affect the vectime and vecvalue columns of the dataframe, which are expected to contain ndarray's of matching lengths.
operations is a multiline string where each line denotes an operation; they are applied in sequence. The syntax of one operation is:
[(compute|apply) : ] opname [ ( arglist ) ] [ # comment ]
Blank lines and lines only containing a comment are also accepted.
opname is the name of the function, optionally qualified with its package name. If the package name is omitted, omnetpp.scave.vectorops is assumed.
compute and apply specify whether the newly computed vectors will replace the input row in the DataFrame (apply) or added as extra lines (compute). The default is apply.
See the contents of the omnetpp.scave.vectorops package for more information.
30.1.4.25 set_plot_title()¶
set_plot_title(title, suggested_chart_name=None)
Sets the plot title. It also sets the suggested chart name (the name that the IDE offers when adding a temporary chart to the Analysis file.)
30.1.4.26 fill_missing_titles()¶
fill_missing_titles(df)
Utility function to fill missing values in the title and moduledisplaypath columns from the name and module columns. (Note that title and moduledisplaypath normally come from result attributes of the same name.)
30.1.4.27 extract_label_columns()¶
extract_label_columns(df, props)
Utility function to make a reasonable guess as to which column of the given DataFrame is most suitable to act as a chart title and which ones can be used as legend labels.
Ideally a "title column" should be one in which all lines have the same value, and can be reasonably used as a title. This is often the title or name column.
Label columns should be a minimal set of columns whose corresponding value tuples uniquely identify every line in the DataFrame. These will primarily be iteration variables and run attributes.
Returns:
A pair of a string and a list; the first value is the name of the "title" column, and the second one is a list of pairs, each containing the index and the name of a "label" column.
Example: ('title', [(8, 'numHosts'), (7, 'iaMean')])
30.1.4.28 make_chart_title()¶
make_chart_title(df, title_cols)
Produces a reasonably good chart title text from a result DataFrame, given a selected list of "title" columns.
30.1.4.29 select_best_partitioning_column_pair()¶
select_best_partitioning_column_pair(df, props=None)
Choose two columns from the dataframe which best partitions the rows of the dataframe, and returns their names as a pair. Returns (None, None) if no such pair was found. This method is useful for creating e.g. a bar plot.
30.1.4.30 select_groups_series()¶
select_groups_series(df, props)
Extracts the column names to be used for groups and series from the df DataFrame, for pivoting. The columns whose names are to be used as group names are given in the "groups" property in props, as a comma-separated list. The names for the series are selected similarly, based on the "series" property. There should be no overlap between these two lists.
If both "groups" and "series" are given (non-empty), they are simply returned as lists after some sanity checks. If both of them are empty, a reasonable guess is made for which columns should be used, and (["module"], ["name"]) is used as a fallback.
The data in df should be in the format as returned by result.get_scalars(), and the result can be used directly by utils.pivot_for_barchart().
Returns: - (group_names, series_names): A pair of lists of strings containing the selected names for the groups and the series, respectively.
30.1.4.31 select_xaxis_and_groupby()¶
select_xaxis_and_groupby(df, props)
Extracts an iteration variable name and the column names to be used for grouping from the df DataFrame, for pivoting. The columns whose names are to be used as group names are given in the "group_by" property in props, as a comma-separated list. The name of the iteration variable is selected similarly, from the "xaxis_itervar" property. The "group_by" list should not contain the given "xaxis_itervar" name.
If both "xaxis_itervar" and "group_by" are given (non-empty), they are simply returned after some sanity checks, with "group_by" split into a list. If both of them are empty, a reasonable guess is made for which columns should be used.
The data in df should be in the format as returned by result.get_scalars(), and the result can be used directly by utils.pivot_for_scatterchart().
Returns: - (xaxis_itervar, group_by): An iteration variable name, and a list of strings containing the selected column names to be used as groups.
30.1.4.32 assert_columns_exist()¶
assert_columns_exist(df, cols, message="Expected column missing from DataFrame")
Ensures that the dataframe contains the given columns. If any of them are missing, the function raises an error with the given message.
Parameters:
- df (DataFrame): The DataFrame to operate on
- cols (list of strings): The list of column names to check.
30.1.4.33 to_numeric()¶
to_numeric(df, columns=[])
Convenience function. Runs pandas.to_numeric on the given (or all) columns of df. If any of the given columns doesn't exist, throws an error.
Parameters:
- df (DataFrame): The DataFrame to operate on
- columns (string or list of strings): The column name or list of column names to convert. If not given, all columns will be converted.
30.1.4.34 parse_rcparams()¶
parse_rcparams(rc_content)
Accepts a multiline string that contains rc file content in Matplotlib's RcParams syntax, and returns its contents as a dictionary. Parse errors and duplicate keys are reported via exceptions.
30.1.4.35 make_fancy_xticklabels()¶
make_fancy_xticklabels(ax)
Only useful for Matplotlib plots. It causes the x tick labels to be rotated by the minimum amount necessary so that they don't overlap. Note that the necessary amount of rotation typically depends on the horizontal zoom level.
30.1.4.36 split()¶
split(s, sep=",")
Split a string with the given separator (by default with comma), trim the surrounding whitespace from the items, and return the result as a list. Returns an empty list for an empty or all-whitespace input string. (Note that in contrast, s.split(',') will return an empty array, even for s=''.)
30.1.5 Module omnetpp.scave.vectorops¶
Contains operations that can be applied to vectors.
In the IDE, operations can be applied to vectors on a vector chart by means of the plot's context menu and by editing the Vector Operations field in the chart configuration dialog.
Every vector operation is implemented as a function. The notation used in the documentation of the individual functions is:
- y[k]: The kth value in the input
- t[k]: The kth timestamp in the input
- yout[k]: The kth value in the output
- tout[k]: The kth timestamp in the output
A vector operation function accepts a DataFrame row as the first positional argument, and optionally additional arguments specific to its operation. When the function is invoked, the row will contain a vectime and a vecvalue column (both containing NumPy ndarray's) that are the input of the operation. The function should return a similar row, with updated vectime and a vecvalue columns.
Additionally, the operation may update the name and title columns (provided they exist) to reflect the processing in the name. For example, an operation that computes mean may return mean(%s) as name and Mean of %s as title (where %s indicates the original name/title).
The aggregate() and merge() functions are special. They receive a DataFrame instead of a row in the first argument, and return new DataFrame with the result.
Vector operations can be applied to a DataFrame using utils.perform_vector_ops(df,ops). ops is a multiline string where each line denotes an operation; they are applied in sequence. The syntax of one operation is:
[(compute|apply) : ] opname [ ( arglist ) ] [ # comment ]
opname is the name of the function, optionally qualified with its package name. If the package name is omitted, omnetpp.scave.vectorops is assumed.
compute and apply specify whether the newly computed vectors will replace the input row in the DataFrame (apply) or added as extra lines (compute). The default is apply.
To register a new vector operation, define a function that fulfills the above interface (e.g. in the chart script, or an external .py file, that the chart script imports), with the omnetpp.scave.vectorops.vector_operation decorator on it.
Make sure that the registered function does not modify the data of the NumPy array instances in the rows, because it would have an unwanted effect when used in compute (as opposed to apply) mode.
Example:
from omnetpp.scave import vectorops
@vectorops.vector\_operation("Fooize", "foo(42)")
def foo(r, arg1, arg2=5):
\# r.vectime = r.vectime * 2 \# <- this is okay
\# r.vectime *= 2 \# <- this is NOT okay!
r.vectime = r.vectime * arg1 + arg2
if "title" in r:
r.title = r.title + ", but fooized" \# this is also okay
return r
30.1.5.1 perform_vector_ops()¶
perform_vector_ops(df, operations: str)
See: utils.perform_vector_ops
30.1.5.2 vector_operation()¶
vector_operation(label: str = None, example: str = None)
Returns, or acts as, a decorator; to be used on methods you wish to register as vector operations. Parameters:
- label: will be shown on the GUI for the user
- example: should be string, containing a valid invocation of the function Alternatively, this can also be used directly as decorator (without calling it first).
30.1.5.3 lookup_operation()¶
lookup_operation(module, name)
Returns a function from the registered vector operations by name, and optionally module. module and name are both strings. module can also be None, in which case it is ignored.
30.1.5.4 aggregate()¶
aggregate(df, function="average")
Aggregates several vectors into a single one, aggregating the y values at the same time coordinate with the specified function. Possible values: 'sum', 'average', 'count', 'maximum', 'minimum'
30.1.5.5 merge()¶
merge(df)
Merges several series into a single one, maintaining increasing time order in the output.
30.1.5.6 mean()¶
mean(r)
Computes mean on (0,t): yout[k] = sum(y[i], i=0..k) / (k+1).
30.1.5.7 sum()¶
sum(r)
Sums up values: yout[k] = sum(y[i], i=0..k)
30.1.5.8 add()¶
add(r, c)
Adds a constant to all values in the input: yout[k] = y[k] + c
30.1.5.9 compare()¶
compare(r, threshold, less=None, equal=None, greater=None)
Compares value against a threshold, and optionally replaces it with a constant. yout[k] = if y[k] < threshold and less != None then less; else if y[k] == threshold and equal != None then equal; else if y[k] > threshold and greater != None then greater; else y[k] The last three parameters are all independently optional.
30.1.5.10 crop()¶
crop(r, t1, t2)
Discards values outside the [t1, t2] interval. The time values are in seconds.
30.1.5.11 difference()¶
difference(r)
Subtracts the previous value from every value: yout[k] = y[k] - y[k-1]
30.1.5.12 diffquot()¶
diffquot(r)
Calculates the difference quotient of every value and the subsequent one: yout[k] = (y[k+1]-y[k]) / (t[k+1]-t[k])
30.1.5.13 divide_by()¶
divide_by(r, a)
Divides every value in the input by a constant: yout[k] = y[k] / a
30.1.5.14 divtime()¶
divtime(r)
Divides every value in the input by the corresponding time: yout[k] = y[k] / t[k]
30.1.5.15 expression()¶
expression(r, expression, as_time=False)
Replaces the value with the result of evaluating the Python arithmetic expression given as a string: yout[k] = eval(expression). The expression may use the following variables: t, y, tprev, yprev, tnext, ynext, k, n which stand for t[k], y[k], t[k-1], y[k-1], t[k+1] and y[k+1], k, and the size of vector, respectively.
If as_time is True, the result will be assigned to the time variable instead of the value variable.
Note that for efficiency, the expression will be evaluated only once, with the variables being np.ndarray instances instead of scalar float values. Thus, the result is computed using vector operations instead of looping through all vector indices in Python. Expression syntax remains the usual. Most Numpy mathematical functions can be used without module prefix; other Numpy functions can be used by prefixing them with np..
Examples: 2*y+0.5, abs(floor(y)), (y-yprev)/(t-tprev), fmin(yprev,ynext), cumsum(y), nan_to_num(y)
30.1.5.16 integrate()¶
integrate(r, interpolation="sample-hold")
Integrates the input as a step function ("sample-hold" or "backward-sample-hold") or with linear ("linear") interpolation.
30.1.5.17 lineartrend()¶
lineartrend(r, a)
Adds a linear component with the given steepness to the input series: yout[k] = y[k] + a * t[k]
30.1.5.18 modulo()¶
modulo(r, m)
Computes floating point reminder (modulo) of the input values with a constant: yout[k] = y[k] % m
30.1.5.19 movingavg()¶
movingavg(r, alpha)
Applies the exponentially weighted moving average filter with the given smoothing coefficient in range (0.0, 1.0]: yout[k] = yout[k-1] + alpha * (y[k]-yout[k-1])
30.1.5.20 multiply_by()¶
multiply_by(r, a)
Multiplies every value in the input by a constant: yout[k] = a * y[k]
30.1.5.21 removerepeats()¶
removerepeats(r)
Removes repeated (consecutive) y values
30.1.5.22 slidingwinavg()¶
slidingwinavg(r, window_size, min_samples=None)
Replaces every value with the mean of values in the window: yout[k] = sum(y[i], i=(k-winsize+1)..k) / winsize If min_samples is also given, allows each window to have only that many valid (not missing [at the ends], and not NaN) samples in each window.
30.1.5.23 subtractfirstval()¶
subtractfirstval(r)
Subtract the first value from every subsequent value: yout[k] = y[k] - y[0]
30.1.5.24 timeavg()¶
timeavg(r, interpolation)
Average over time (integral divided by time), possible parameter values: 'sample-hold', 'backward-sample-hold', 'linear'
30.1.5.25 timediff()¶
timediff(r)
Sets each value to the elapsed time (delta) since the previous value: tout[k] = t[k] - t[k-1]
30.1.5.26 timeshift()¶
timeshift(r, dt)
Shifts the input series in time by a constant (in seconds): tout[k] = t[k] + dt
30.1.5.27 timedilation()¶
timedilation(r, c)
Dilates the input series in time by a constant factor: tout[k] = t[k] * c
30.1.5.28 timetoserial()¶
timetoserial(r)
Replaces time values with their index: tout[k] = k
30.1.5.29 timewinavg()¶
timewinavg(r, window_size=1)
Calculates time average: Replaces the input values with one every 'window_size' interval (in seconds), that is the mean of the original values in that interval. tout[k] = k * winSize, yout[k] = average of y values in the [(k-1) * winSize, k * winSize) interval
30.1.5.30 timewinthruput()¶
timewinthruput(r, window_size=1)
Calculates time windowed throughput: tout[k] = k * winSize, yout[k] = sum of y values in the [(k-1) * winSize, k * winSize) interval divided by window_size
30.1.5.31 winavg()¶
winavg(r, window_size=10)
Calculates batched average: replaces every 'winsize' input values with their mean. Time is the time of the first value in the batch.
30.1.6 Module omnetpp.scave.analysis¶
This module allows reading, writing, creating and editing OMNeT++ Analysis (.anf) files, querying their contents, and running the charts scripts they contain. The main user of this module is opp_charttool.
30.1.6.1 Class ExpatError¶
30.1.6.2 Class DialogPage¶
Represents a dialog page in a Chart. Dialog pages have an ID, a label (which the IDE displays on the page's tab in the Chart Properties dialog), and XSWT content (which describes the UI controls on the page).
DialogPage(self, id: str = None, label: str = "", content: str = "")
30.1.6.3 Class Chart¶
Represents a chart in an Analysis. Charts have an ID, a name, a chart script (a Python script that mainly uses Pandas and the omnetpp.scave.* modules), dialog pages (which make up the contents of the Chart Properties dialog in the IDE), and properties (which are what the Chart Properties dialog in the IDE edits).
Chart(self, id: str = None, name: str = "", type: str = "MATPLOTLIB", template: str = None, icon: str = None, script: str = "", dialog_pages=[], properties={}, created_with: str = None)
30.1.6.4 Class Folder¶
Represents a folder in an Analysis. Folders may contain charts and further folders.
Folder(self, id: str = None, name: str = "", items=[])
30.1.6.5 Class Workspace¶
This is an abstraction of an IDE workspace, and makes it possible to map workspace paths to filesystem paths. This is necessary because the inputs in the Analysis are workspace paths. The class tolerates if workspace metadata (the .metadata subdirectory) is missing; then it looks for projects in directories adjacent to other known projects.
Workspace(self, workspace_dir=None, project_locations=None)
Accepts the workspace location, plus a dict that contains the (absolute, or workspace-location-relative) location of projects by name. The latter is useful for projects that are NOT at the <workspace_dir>/<projectname> location.
Workspace.find_enclosing_project(self, file=None)
Find the project name searching from the given directory (or the current dir if not given) upwards. Project directories of the Eclipse-based IDE can be recognized by having a .project file in them.
Workspace.find_enclosing_project_location(file=None)
Utility function: Find the project directory searching from the given directory (or the current dir if not given) upwards. Project directories of the Eclipse-based IDE can be recognized by having a .project file in them.
Workspace.find_workspace(dir=None)
Utility function: Find the IDE workspace directory searching from the given directory (or the current dir if not given) upwards. The workspace directory of the Eclipse-based IDE can be recognized by having a .metadata subdir. If the workspace is not found, None is returned.
Workspace.get_all_referenced_projects(self, project_name, include_self=False)
Returns a list of projects that are referenced by the given project, even transitively.
Workspace.get_project_location(self, project_name)
Returns the location of the given workspace project in the filesystem path.
Workspace.get_project_name(self, project_dir)
Returns the "real" name of the project from the .project (project description) file in the given project directory.
Workspace.get_referenced_projects(self, project_name)
Returns a list of projects that are referenced by the given project.
Workspace.to_filesystem_path(self, wspath)
Translate workspace paths to filesystem path.
30.1.6.6 Class Analysis¶
Represents an OMNeT++ Analysis, i.e. the contents of an anf file. Methods allow reading/writing anf files, and running the charts in them for interactive display, image/data export or other side effects.
Analysis(self, inputs=[], items=[])
Analysis.collect_charts(self, folder=None)
Collects and returns a list of all charts in the specified folder, or in this Analysis if no folder is given.
Analysis.export_data(self, chart, wd, workspace, format="csv", target_folder=None, filename=None, enforce=True, extra_props={}, suppress_print=False)
Runs a chart script for data export. This method just calls run_chart() with extra properties that instruct the chart script to perform data export. (It is assumed that the chart script invokes utils.export_data_if_needed() or implements equivalent functionality).
Analysis.export_image(self, chart, wd, workspace, format="svg", target_folder=None, filename=None, width=None, height=None, dpi=300, enforce=True, extra_props={}, suppress_print=False)
Runs a chart script for image export. This method just calls run_chart() with extra properties that instruct the chart script to perform image export. (It is assumed that the chart script invokes utils.export_image_if_needed() or implements equivalent functionality).
Analysis.from_anf_file(anf_file_name)
Reads the given anf file and returns its content as an Analysis object.
Analysis.get_item_path(self, item)
Returns the path of the item (Chart or Folder) within the Analysis as list of path segments (Folder items). The returned list includes both the root folder of the Analysis and the item itself. If the item is not part of the Analysis, None is returned.
Analysis.get_item_path_as_string(self, item, separator=" / ")
Returns the path of the item (Chart or Folder) within the Analysis as a string. Segments are joined with the given separator. The returned string includes the item name itself, but not the root folder (i.e. for items in the root folder, the path string equals to the item name). If the item is not part of the Analysis, None is returned.
Analysis.run_chart(self, chart, wd, workspace, extra_props={}, show=False, suppress_print=False)
Runs a chart script with the given working directory, workspace, and extra properties in addition to the chart's properties. If show=True, it calls plt.show() if it was not already called by the script.
Analysis.to_anf_file(self, filename)
Saves the analysis to the given .anf file.
30.1.6.7 load_anf_file()¶
load_anf_file(anf_file_name)
Reads the given anf file and returns its content as an Analysis object. This is synonym for Analysis.from_anf_file().
30.1.7 Module omnetpp.scave.charttemplate¶
Loading and instantiating chart templates.
30.1.7.1 Class ChartTemplate¶
Represents a chart template.
ChartTemplate(self, id: str, name: str, type: str, icon: str, script: str, dialog_pages, properties)
Creates a chart template from the given data elements.
Parameters:
- id (string): A short string that uniquely identifies the chart template.
- name (string): Name of the chart template.
- type (string): Chart type, one of: "bar"/"histogram"/"line"/"matplotlib".
- icon (string): Name of the icon to be used for charts of this type.
- script (string): The Python chart script.
- dialog_pages (list of DialogPage): Pages of the "Configure Chart" dialog.
- properties (string->string dictionary): Initial values for chart properties.
ChartTemplate.create_chart(self, id: int = None, name: str = None, props=None)
Creates and returns a chart object (org.omnetpp.scave.Chart) from this chart template. Chart properties will be set to the default values defined by the chart template. If a props argument is present, property values in it will overwrite the defaults.
Parameters:
- id (string): A numeric string that identifies the chart within the Analysis. Auto-assigned if missing.
- name (string): Name for the chart. If missing, the chart template name will be used.
- props (string->string dictionary): Chart properties to set. It may not introduce new properties, i.e. the keys must be subset of the property keys defined in the chart template.
30.1.7.2 get_chart_template_locations()¶
get_chart_template_locations()
Returns a list of locations (directories) where the chart templates that come with the IDE can be found.
30.1.7.3 load_chart_templates()¶
load_chart_templates(dirs=[], add_default_locations=True)
Loads chart templates from the given list of directories, and returns them in a dictionary. Chart templates are loaded from files with the .properties extension.
Parameters:
- dirs (string list): A short string that uniquely identifies the chart template.
- add_default_locations (bool): Whether the directories returned by get_chart_template_locations() should also be searched in addition to the specified directory list.
Returns:
- A string->ChartTemplate dictionary, with chart template IDs used as keys.
30.1.7.4 load_chart_template()¶
load_chart_template(properties_file)
Loads the chart template from the specified .properties file, and returns it as a ChartTemplate object.