Gauss Markov movement model. More...
#include <GaussMarkovMobility.h>
Public Member Functions | |
| virtual double | getMaxSpeed () const override |
| Returns the maximum possible speed at any future time. More... | |
| GaussMarkovMobility () | |
 Public Member Functions inherited from inet::LineSegmentsMobilityBase Public Member Functions inherited from inet::LineSegmentsMobilityBase | |
| LineSegmentsMobilityBase () | |
| Public Member Functions inherited from inet::MovingMobilityBase | |
| virtual Coord | getCurrentPosition () override |
| Returns the current position at the current simulation time. More... | |
| virtual Coord | getCurrentSpeed () override |
| Returns the current speed at the current simulation time. More... | |
| virtual EulerAngles | getCurrentAngularPosition () override |
| Returns the current angular position at the current simulation time. More... | |
| Public Member Functions inherited from inet::MobilityBase | |
| virtual EulerAngles | getCurrentAngularSpeed () override |
| Returns the current angular speed at the current simulation time. More... | |
| virtual Coord | getConstraintAreaMax () const override |
| Returns the current angular acceleration at the current simulation time. More... | |
| virtual Coord | getConstraintAreaMin () const override |
| Public Member Functions inherited from inet::IMobility | |
| virtual | ~IMobility () |
Protected Member Functions | |
| virtual int | numInitStages () const override |
| Returns the required number of initialize stages. More... | |
| virtual void | initialize (int stage) override |
| Initializes mobility model parameters. More... | |
| void | preventBorderHugging () |
| If the host is too close to the border it is repelled. More... | |
| virtual void | move () override |
| Move the host. More... | |
| virtual void | setTargetPosition () override |
| Calculate a new target position to move to. More... | |
| Protected Member Functions inherited from inet::LineSegmentsMobilityBase | |
| virtual void | initializePosition () override |
| Initializes mobility position. More... | |
| Protected Member Functions inherited from inet::MovingMobilityBase | |
| MovingMobilityBase () | |
| virtual | ~MovingMobilityBase () |
| virtual void | handleSelfMessage (cMessage *message) override |
| Called upon arrival of a self messages, subclasses must override. More... | |
| void | scheduleUpdate () |
| Schedules the move timer that will update the mobility state. More... | |
| void | moveAndUpdate () |
| Moves and notifies listeners. More... | |
| Protected Member Functions inherited from inet::MobilityBase | |
| MobilityBase () | |
| virtual void | setInitialPosition () |
| Initializes the position from the display string or from module parameters. More... | |
| virtual void | checkPosition () |
| Checks whether the position is valid or not. More... | |
| virtual void | initializeOrientation () |
| Initializes the orientation from module parameters. More... | |
| virtual void | handleMessage (cMessage *msg) override |
| This modules should only receive self-messages. More... | |
| virtual void | updateVisualRepresentation () |
| Moves the visual representation module's icon to the new position on the screen. More... | |
| virtual void | emitMobilityStateChangedSignal () |
| Emits a signal with the updated mobility state. More... | |
| virtual Coord | getRandomPosition () |
| Returns a new random position satisfying the constraint area. More... | |
| virtual cModule * | findVisualRepresentation () |
| Returns the module that represents the object moved by this mobility module. More... | |
| virtual bool | isOutside () |
| Returns true if the mobility is outside of the constraint area. More... | |
| virtual void | reflectIfOutside (Coord &targetPosition, Coord &speed, double &angle) |
| Utility function to reflect the node if it goes outside the constraint area. More... | |
| virtual void | wrapIfOutside (Coord &targetPosition) |
| Utility function to wrap the node to the opposite edge (torus) if it goes outside the constraint area. More... | |
| virtual void | placeRandomlyIfOutside (Coord &targetPosition) |
| Utility function to place the node randomly if it goes outside the constraint area. More... | |
| virtual void | raiseErrorIfOutside () |
| Utility function to raise an error if the node gets outside the constraint area. More... | |
| virtual void | handleIfOutside (BorderPolicy policy, Coord &targetPosition, Coord &speed, double &angle) |
| Invokes one of reflectIfOutside(), wrapIfOutside() and placeRandomlyIfOutside(), depending on the given border policy. More... | |
Protected Attributes | |
| double | speed |
| speed of the host More... | |
| double | angle |
| angle of linear motion More... | |
| double | alpha |
| alpha parameter More... | |
| int | margin |
| margin at which the host gets repelled from the border More... | |
| double | speedMean |
| speed mean More... | |
| double | angleMean |
| angle mean More... | |
| double | variance |
| variance More... | |
| Protected Attributes inherited from inet::LineSegmentsMobilityBase | |
| Coord | targetPosition |
| End position of current linear movement. More... | |
| Protected Attributes inherited from inet::MovingMobilityBase | |
| cMessage * | moveTimer |
| The message used for mobility state changes. More... | |
| simtime_t | updateInterval |
| The simulation time interval used to regularly signal mobility state changes. More... | |
| bool | stationary |
| A mobility model may decide to become stationary at any time. More... | |
| Coord | lastSpeed |
| The last speed that was reported at lastUpdate. More... | |
| simtime_t | lastUpdate |
| The simulation time when the mobility state was last updated. More... | |
| simtime_t | nextChange |
| The next simulation time when the mobility module needs to update its internal state. More... | |
| Protected Attributes inherited from inet::MobilityBase | |
| cModule * | visualRepresentation |
| Pointer to visual representation module, to speed up repeated access. More... | |
| const CanvasProjection * | canvasProjection |
| The 2D projection used on the canvas. More... | |
| Coord | constraintAreaMin |
| 3 dimensional position and size of the constraint area (in meters). More... | |
| Coord | constraintAreaMax |
| Coord | lastPosition |
| The last position that was reported. More... | |
| EulerAngles | lastOrientation |
| The last position that was reported. More... | |
Additional Inherited Members | |
| Public Types inherited from inet::MobilityBase | |
| enum | BorderPolicy { REFLECT, WRAP, PLACERANDOMLY, RAISEERROR } |
| Selects how a mobility module should behave if it reaches the edge of the constraint area. More... | |
| Static Public Attributes inherited from inet::IMobility | |
| static simsignal_t | mobilityStateChangedSignal = cComponent::registerSignal("mobilityStateChanged") |
| A signal used to publish mobility state changes. More... | |
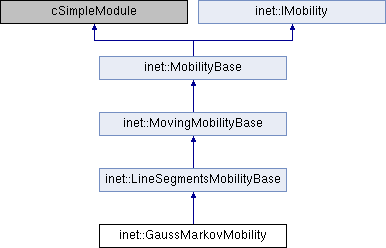
Detailed Description
Gauss Markov movement model.
See NED file for more info.
Constructor & Destructor Documentation
| inet::GaussMarkovMobility::GaussMarkovMobility | ( | ) |
Member Function Documentation
|
inlineoverridevirtual |
|
overrideprotectedvirtual |
Initializes mobility model parameters.
Reimplemented from inet::MovingMobilityBase.
|
overrideprotectedvirtual |
Move the host.
Reimplemented from inet::LineSegmentsMobilityBase.
|
inlineoverrideprotectedvirtual |
|
protected |
If the host is too close to the border it is repelled.
Referenced by move().
|
overrideprotectedvirtual |
Calculate a new target position to move to.
Implements inet::LineSegmentsMobilityBase.
Member Data Documentation
|
protected |
alpha parameter
Referenced by GaussMarkovMobility(), initialize(), and setTargetPosition().
|
protected |
angle of linear motion
Referenced by GaussMarkovMobility(), initialize(), move(), and setTargetPosition().
|
protected |
angle mean
Referenced by GaussMarkovMobility(), initialize(), preventBorderHugging(), and setTargetPosition().
|
protected |
margin at which the host gets repelled from the border
Referenced by GaussMarkovMobility(), initialize(), and preventBorderHugging().
|
protected |
speed of the host
Referenced by GaussMarkovMobility(), initialize(), and setTargetPosition().
|
protected |
speed mean
Referenced by GaussMarkovMobility(), initialize(), and setTargetPosition().
|
protected |
variance
Referenced by GaussMarkovMobility(), initialize(), and setTargetPosition().
The documentation for this class was generated from the following files:
