Classes |
Public Member Functions |
Static Public Member Functions |
Protected Member Functions |
Protected Attributes |
List of all members
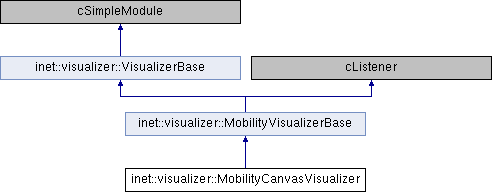
inet::visualizer::MobilityCanvasVisualizer Class Reference
#include <MobilityCanvasVisualizer.h>
Inheritance diagram for inet::visualizer::MobilityCanvasVisualizer:
Classes | |
| class | MobilityCanvasVisualization |
Public Member Functions | |
| virtual | ~MobilityCanvasVisualizer () |
| virtual void | receiveSignal (cComponent *source, simsignal_t signal, cObject *object, cObject *details) override |
 Public Member Functions inherited from inet::visualizer::MobilityVisualizerBase Public Member Functions inherited from inet::visualizer::MobilityVisualizerBase | |
| virtual | ~MobilityVisualizerBase () |
Static Public Member Functions | |
| static void | setPosition (cModule *visualRepresentation, cFigure::Point position) |
Protected Member Functions | |
| virtual void | initialize (int stage) override |
| virtual void | refreshDisplay () const override |
| virtual cModule * | findVisualRepresentation (cModule *module) const |
| virtual MobilityCanvasVisualization * | getMobilityVisualization (const IMobility *mobility) const |
| virtual void | setMobilityVisualization (const IMobility *mobility, MobilityCanvasVisualization *entry) |
| virtual void | removeMobilityVisualization (const IMobility *mobility) |
| virtual MobilityCanvasVisualization * | ensureMobilityVisualization (IMobility *mobility) |
| virtual void | extendMovementTrail (const IMobility *mobility, TrailFigure *trailFigure, cFigure::Point position) const |
| Protected Member Functions inherited from inet::visualizer::MobilityVisualizerBase | |
| virtual void | handleParameterChange (const char *name) override |
| virtual void | subscribe () |
| virtual void | unsubscribe () |
| Protected Member Functions inherited from inet::visualizer::VisualizerBase | |
| virtual int | numInitStages () const override |
| virtual Coord | getPosition (const cModule *networkNode) const |
| virtual Coord | getContactPosition (const cModule *networkNode, const Coord &fromPosition, const char *contactMode, double contactSpacing) const |
| virtual InterfaceEntry * | getInterfaceEntry (cModule *networkNode, cModule *module) const |
Constructor & Destructor Documentation
|
virtual |
std::map< const IMobility *, MobilityCanvasVisualization * > mobilityVisualizations
Definition: MobilityCanvasVisualizer.h:50
Member Function Documentation
|
protectedvirtual |
Referenced by receiveSignal().
115 auto visualization = networkNodeVisualizer->getNetworkNodeVisualization(getContainingNode(module));
122 orientationFigure->setTooltip("This arc represents the current orientation of the mobility model");
150 mobilityVisualization = new MobilityCanvasVisualization(visualization, visualRepresentation, orientationFigure, velocityFigure, trailFigure, mobility);
double velocityLineWidth
Definition: MobilityVisualizerBase.h:57
int trailLength
Definition: MobilityVisualizerBase.h:64
cFigure::Color velocityLineColor
Definition: MobilityVisualizerBase.h:55
bool displayVelocities
Definition: MobilityVisualizerBase.h:53
cFigure::LineStyle velocityLineStyle
Definition: MobilityVisualizerBase.h:56
double zIndex
Definition: MobilityCanvasVisualizer.h:47
virtual NetworkNodeCanvasVisualization * getNetworkNodeVisualization(const cModule *networkNode) const
Definition: NetworkNodeCanvasVisualizer.cc:63
virtual cModule * findVisualRepresentation(cModule *module) const
Definition: MobilityCanvasVisualizer.cc:82
bool displayMovementTrails
Definition: MobilityVisualizerBase.h:59
virtual void setMobilityVisualization(const IMobility *mobility, MobilityCanvasVisualization *entry)
Definition: MobilityCanvasVisualizer.cc:98
cModule * getContainingNode(const cModule *from)
Find the node containing the given module.
Definition: ModuleAccess.cc:65
double orientationLineWidth
Definition: MobilityVisualizerBase.h:51
cFigure::LineStyle orientationLineStyle
Definition: MobilityVisualizerBase.h:50
cModule * visualizerTargetModule
Definition: VisualizerBase.h:31
virtual MobilityCanvasVisualization * getMobilityVisualization(const IMobility *mobility) const
Definition: MobilityCanvasVisualizer.cc:89
cFigure::Color orientationLineColor
Definition: MobilityVisualizerBase.h:49
bool displayOrientations
Definition: MobilityVisualizerBase.h:47
NetworkNodeCanvasVisualizer * networkNodeVisualizer
Definition: MobilityCanvasVisualizer.h:49
|
protectedvirtual |
Referenced by refreshDisplay().
163 startPosition = static_cast<cLineFigure*>(trailFigure->getFigure(trailFigure->getNumFigures() - 1))->getEnd();
170 movementLine->setTooltip("This line represents the recent movement trail of the mobility model");
ColorSet movementTrailLineColorSet
Definition: MobilityVisualizerBase.h:61
double movementTrailLineWidth
Definition: MobilityVisualizerBase.h:63
cFigure::LineStyle movementTrailLineStyle
Definition: MobilityVisualizerBase.h:62
cFigure::Color getColor(int index) const
Definition: ColorSet.cc:43
|
protectedvirtual |
Referenced by ensureMobilityVisualization().
cModule * visualizerTargetModule
Definition: VisualizerBase.h:31
|
protectedvirtual |
Referenced by ensureMobilityVisualization().
std::map< const IMobility *, MobilityCanvasVisualization * > mobilityVisualizations
Definition: MobilityCanvasVisualizer.h:50
|
overrideprotectedvirtual |
Reimplemented from inet::visualizer::MobilityVisualizerBase.
50 networkNodeVisualizer = getModuleFromPar<NetworkNodeCanvasVisualizer>(par("networkNodeVisualizerModule"), this);
double zIndex
Definition: MobilityCanvasVisualizer.h:47
Physical environment initializations (mobility, obstacles, battery, annotations, etc).
Definition: InitStages.h:40
const CanvasProjection * canvasProjection
Definition: MobilityCanvasVisualizer.h:48
virtual void initialize(int stage) override
Definition: MobilityVisualizerBase.cc:36
cModule * visualizerTargetModule
Definition: VisualizerBase.h:31
NetworkNodeCanvasVisualizer * networkNodeVisualizer
Definition: MobilityCanvasVisualizer.h:49
static const CanvasProjection * getCanvasProjection(const cCanvas *canvas)
Definition: CanvasProjection.cc:38
|
overridevirtual |
ModuleFilter moduleFilter
Definition: MobilityVisualizerBase.h:45
static simsignal_t mobilityStateChangedSignal
A signal used to publish mobility state changes.
Definition: IMobility.h:42
bool matches(const cModule *module) const
Definition: ModuleFilter.cc:29
virtual MobilityCanvasVisualization * ensureMobilityVisualization(IMobility *mobility)
Definition: MobilityCanvasVisualizer.cc:108
|
overrideprotectedvirtual |
63 mobilityVisualization->networkNodeVisualization->setTransform(cFigure::Transform().translate(position.x, position.y));
79 visualizerTargetModule->getCanvas()->setAnimationSpeed(mobilityVisualizations.empty() ? 0 : animationSpeed, this);
std::map< const IMobility *, MobilityCanvasVisualization * > mobilityVisualizations
Definition: MobilityCanvasVisualizer.h:50
bool displayVelocities
Definition: MobilityVisualizerBase.h:53
static void setPosition(cModule *visualRepresentation, cFigure::Point position)
Definition: MobilityCanvasVisualizer.cc:193
virtual void extendMovementTrail(const IMobility *mobility, TrailFigure *trailFigure, cFigure::Point position) const
Definition: MobilityCanvasVisualizer.cc:156
const CanvasProjection * canvasProjection
Definition: MobilityCanvasVisualizer.h:48
double animationSpeed
Definition: MobilityVisualizerBase.h:44
bool displayMovementTrails
Definition: MobilityVisualizerBase.h:59
double orientationArcSize
Definition: MobilityVisualizerBase.h:48
double velocityArrowScale
Definition: MobilityVisualizerBase.h:54
cModule * visualizerTargetModule
Definition: VisualizerBase.h:31
bool displayOrientations
Definition: MobilityVisualizerBase.h:47
cFigure::Point computeCanvasPoint(const Coord &point) const
Definition: CanvasProjection.cc:32
|
protectedvirtual |
std::map< const IMobility *, MobilityCanvasVisualization * > mobilityVisualizations
Definition: MobilityCanvasVisualizer.h:50
|
protectedvirtual |
Referenced by ensureMobilityVisualization().
std::map< const IMobility *, MobilityCanvasVisualization * > mobilityVisualizations
Definition: MobilityCanvasVisualizer.h:50
|
static |
Referenced by refreshDisplay(), and inet::MobilityBase::updateVisualRepresentation().
Member Data Documentation
|
protected |
Referenced by initialize(), and refreshDisplay().
|
protected |
|
protected |
Referenced by ensureMobilityVisualization(), and initialize().
|
protected |
Referenced by ensureMobilityVisualization(), and initialize().
The documentation for this class was generated from the following files:
